
模型预测控制器在质子交换膜燃料电池中的应用
2013-10-30 07:33樊立萍
沈阳化工大学学报 2013年3期
张 君, 樊立萍, 李 崇
(沈阳化工大学信息工程学院,辽宁沈阳 110142)
随着世界范围内能源价格的节节攀升和环境污染问题的日趋恶化,人类越来越需要具备储存量大、低污染和高能量转换率特点的新型能源.质子交换膜燃料电池(PEMFC)作为一种新型发电装置获得了世界范围内各国政府和企业的高度认可,它以氢气和氧气作为燃料,水是其发电过程中唯一的残留物,不会对环境造成任何污染.PEMFC能够将储存在燃料和氧化剂中的化学能通过电极反应直接转换为电能,不通过热机过程,发电效率不受卡诺(Carnot)循环限制,具备能量转换率高的优势.PEMFC的输出功率在数瓦至数千瓦之间,因此完全适用于多种场合.根据其输出功率的不同,PEMFC一方面可作为应急电源和小型移动电源,应用于野外供电、应急供电以及高可靠性、高稳定性供电的场所.另一方面,由于PEMFC具备工作温度低、启动速度快和高功率密度等特点,其整体综合性能完全能够胜任汽车的新一代能源动力系统.此外,与集中供电相比,PEMFC也可串联起来组成电池组应用于分布式电站,而且可与电网供电系统共用,用来调峰.
本文基于MATLAB/Simulink仿真平台,以Amphlett模型为基础[1],通过分析浓度极化过电压与双层电荷层作用对单电池输出特性的影响,建立以氢气压力、氧气压力和温度为模型输入,输出电压为模型输出的单电池仿真模型,并对其进行模型预测控制器(MPC)的设计.MPC算法采用多步预测、滚动优化和反馈校正等控制策略,具有控制效果好、鲁棒性强、对模型精确性要求不高的优点,保证了系统在整个状态空间内具有较好的运动品质.在此基础上进一步分析在有无约束条件情况下,分别选择输入的氢气压力和氧气压力作为系统的控制变量对控制器控制效果的影响.
1 质子交换膜燃料电池的数学模型
PEMFC发电系统由电堆、氢氧供应系统、水热管理系统、电能变换系统和控制系统等构成.电堆是PEMFC发电系统的核心,PEMFC发电系统运行时,在催化剂作用下,氢分子解离为质子和电子.质子通过质子交换膜到达阴极,并在阴极催化剂作用下与通过管道到达阴极的O2发生反应,生成水并产生热量.电子则只能通过外电路到达阴极,这样,电子在外电路便形成电流,通过适当连接便可向负载输出电能[2-3].质子交换膜燃料电池反应式见(1)~(3).

依据燃料电池的氢/氧能斯特方程,热力学电动势 Enernst可表示为[4]:
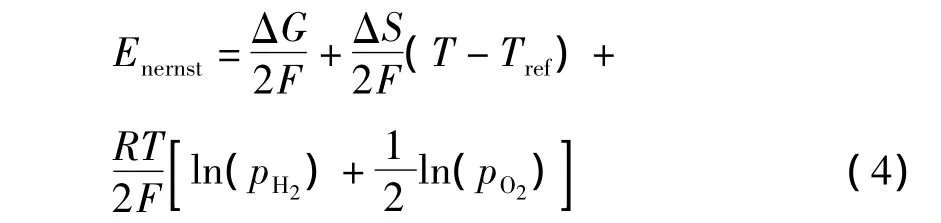
其中:ΔG为吉布斯自由能;F为法拉第常量;ΔS为熵变;R为普适气体常数;pH2和pO2分别为H2和O2的压力;T为环境温度;Tref为参考温度.
活化极化电压是由发生在电极表面、反应缓慢的动力学反应所引起的,活化极化电压可用下式表示[5]:

其中:ξ1、ξ2、ξ3、ξ4为基于经验数据获得的流体动力学、热力学以及电化学电动势的模型参数;I为电流密度;cO2为有效氧浓度.基于 Henry定律,cO2可表示如下[5]:

欧姆极化过电压主要是由质子交换膜的等效阻抗RM和阻碍质子通过质子交换膜的等效阻抗RC所引起的,欧姆极化过电压可由如下的式子表示[5-7]:

等效阻抗RM和RC可由表达式 (8)~(9)来表示.
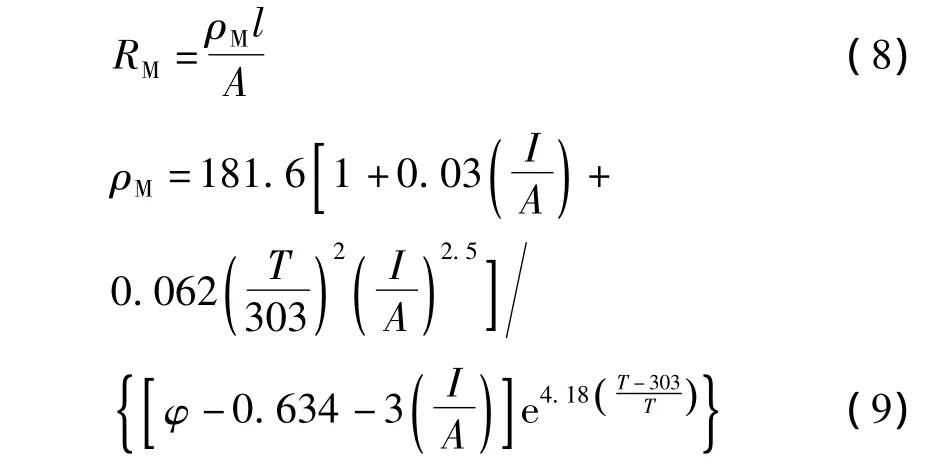
ρM为质子膜对电子流的电阻率(Ω·cm);l为质子交换膜厚度.
浓差极化过电压主要是由传质现象引起的,因为传质现象能够直接影响氢气和氧气的浓度.浓差极化过电压可用下式表示:

其中,B是由燃料电池本身决定的辅助系数.
电池的输出电流、温度、氢气和氧气的压力都会直接影响电池的输出电压,电池的电压降可通过调整输入气体的压力来进行补偿.电池在反应过程中存在一个双电荷层作用,根据PEMFC的特点,氢离子聚集在电解质表面,而电子则聚集在电极表面.这样的双电荷层作用相当于在极化电阻的两端设置一个电容器C,电荷和能量通过这样的方式被储存起来,从而提高质子交换膜燃料电池的性能.将电容C和电感L引入到PEMFC的模型之中,其电压之间的关系式可由如下表达式来表示[6]:

PEMFC输出电压的表达式如下所示:

2 Simulink仿真平台下的系统仿真
基于公式(4)~(12),在MATLAB/Simulink仿真平台下建立PEMFC单电池动态仿真模型,仿真中所使用的主要参数如表1所示.其具体形式如图1所示.

表1 模型参数Table 1 Model parameters

图1 PEMFC的仿真模型Fig.1 Simulation model of PEMFC fuel cell
3 控制器的设计及其算法分析
模型预测控制(MPC)是一种基于模型的闭环优化控制策略,它采用脉冲响应的非参数模型作为内部模型,根据对象的历史信息和未来输入,通过对性能指标J的最优化求解,预测出未来的控制作用.模型预测控制的具体优化过程为:在k时刻,根据状态变量计算出性能指标J的最优解,并且使用最优控制序列的第一个元素Δu(ki)作为控制输出;在k+1时刻,基于新的状态变量重新计算性能指标J的最优解,对原有的控制输出进行修正,再进行新的优化.因此,模型预测控制也被称为滚动时域控制(RHC)[7-10].
对于一个离散系统:

模型预测控制的状态空间可用如下表达式表示:
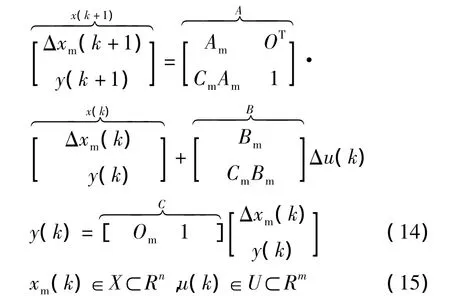
其中,xm(k)、u(k)、y(k)分别为状态变量、输入变量和输出变量.
建立在状态空间的基础上,未来的状态变量可逐次计算如下:


根据预测所得到的未来的状态变量,可以得出未来的输出变量:
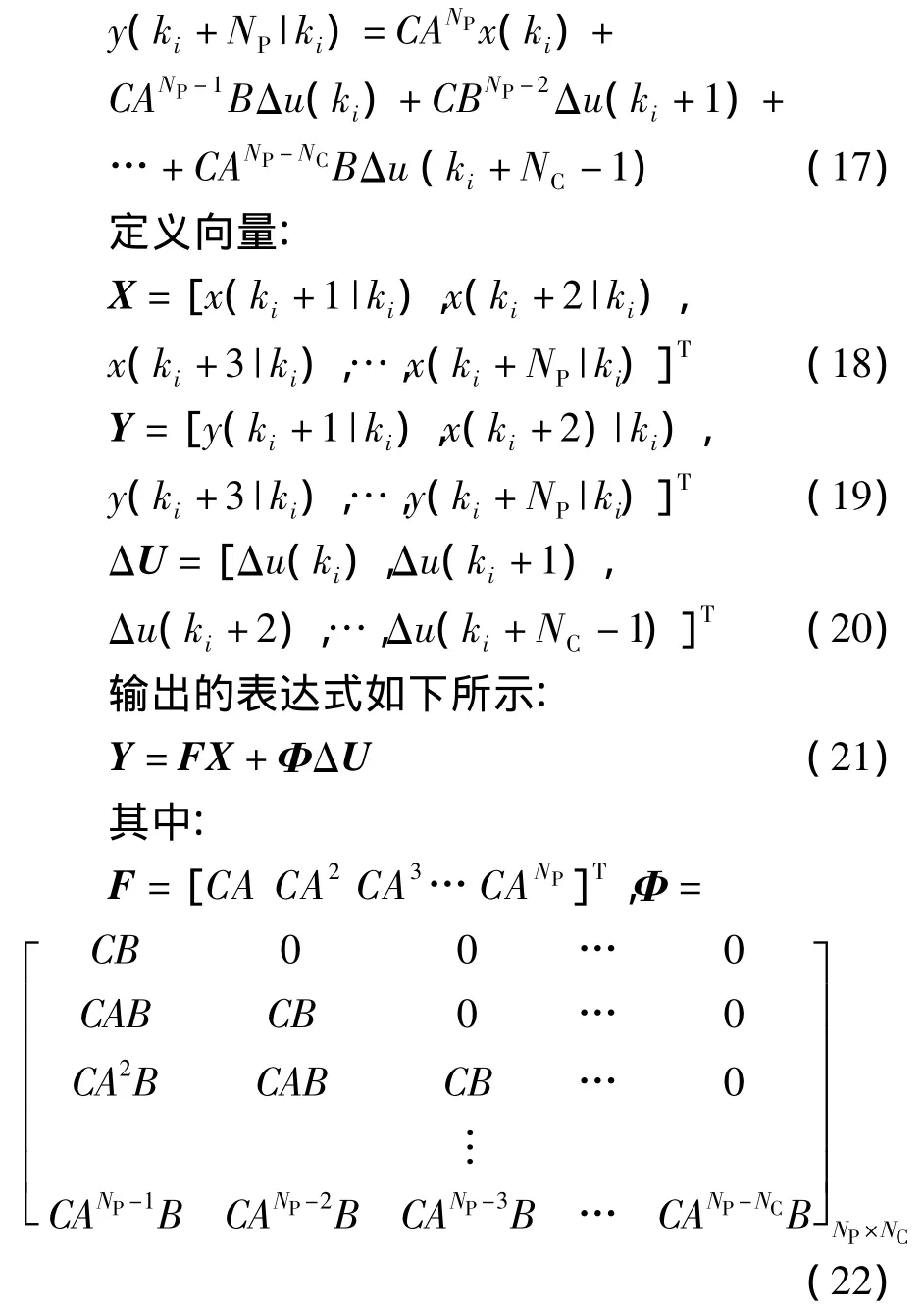
对当前的状态变量而言,模型预测控制能够对下式的性能指数J进行优化:


依据(25)式,可获得控制信号和性能指标的最优解,其表达式如下:

4 仿真结果分析
设置预测域长度NP=20,控制域长度NC=4,rw=0.001,期望的稳态电压为 Ufc=1 V.
当选择氧气压力pO2作为控制变量时,图2中给出了在无约束条件情况下,PEMFC的输出和控制图像;图3给出了在采用u∈[0,10],Δu∈[-3,3]为约束条件情况下,PEMFC的输出和控制图像.
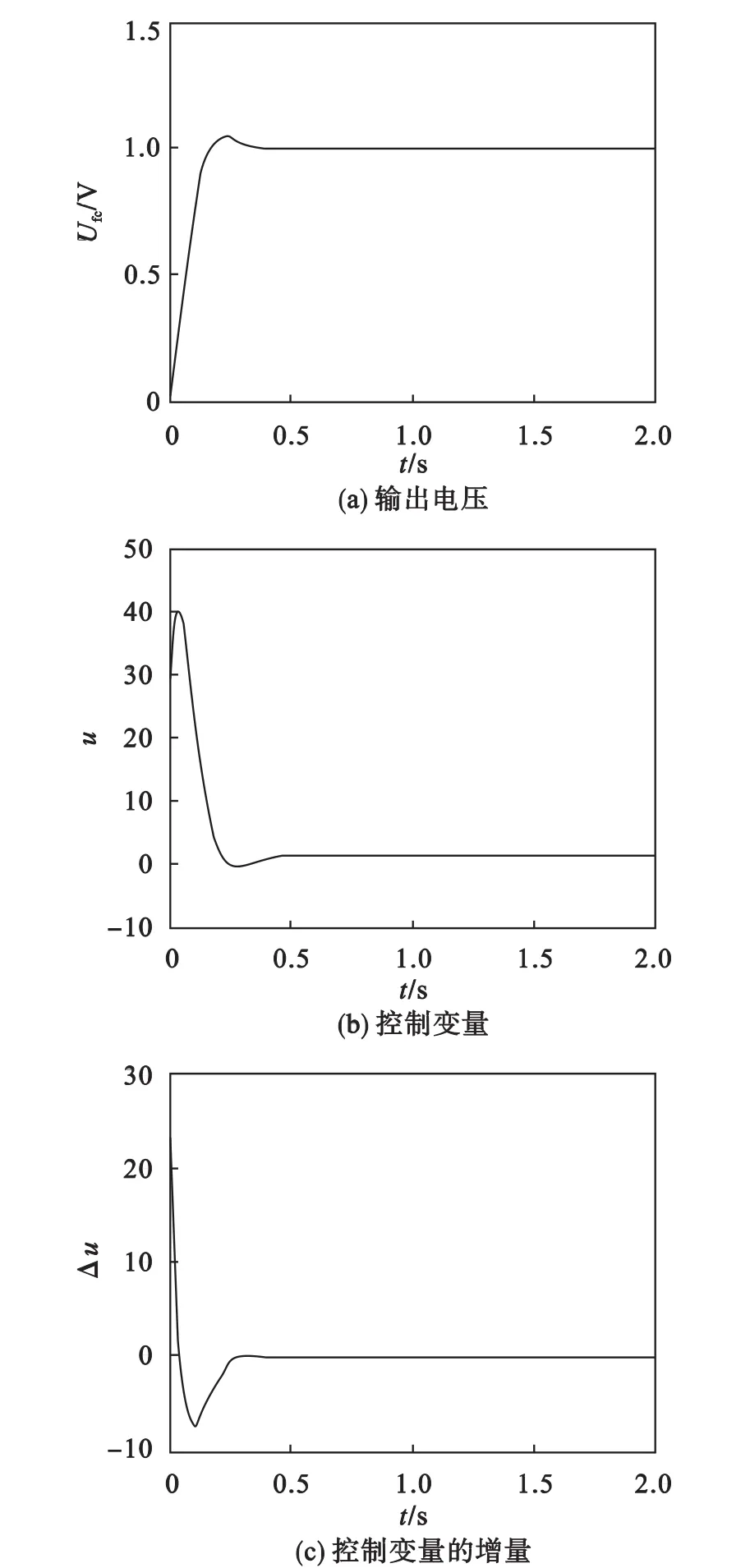
图2 无约束条件时的仿真运行结果Fig.2 Simulation results without constraints condition

图3 有约束条件时的仿真运行结果Fig.3 Simulation results with constraints condition
从图2和图3的对比分析可知:在无约束条件情况下,系统的输出电压能够在0.5 s之后到达稳态;并且在有约束条件情况下,系统的输出电压也能够在0.7 s之后到达稳态.系统的响应曲线在有无约束条件存在时没有明显区别.所以,如果选择氧气压力pO2作为控制变量能够获得较好的控制效果.
当选择氢气压力pH2作为控制变量时,图4给出了在无约束条件情况下,PEMFC的输出和控制图像;图5给出了在采用u∈[0,10],Δu∈[-3,3]为约束条件情况下,PEMFC的输出和控制图像.

图4 无约束条件时的仿真运行结果Fig.4 Simulation results without constraints condition
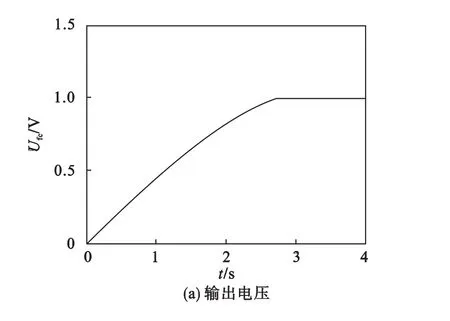

图5 有约束条件时的仿真运行结果Fig.5 Simulation results with constraints condition
从图4和图5的对比分析可知:在无约束条件情况下,系统的输出电压能够在0.7 s之后到达稳态;然而在有约束条件情况下,系统的输出电压直到2.8 s之后才能够到达稳态.在选择氢气压力作为控制变量时,是否采用约束条件对系统的输出特性存在较大影响.所以,如果选择氢气压力pH2作为控制变量将获得较差的控制效果.在无约束条件的情况下,选择氧气压力pO2和氢气压力pH2作为控制变量,其控制效果基本相同;但在有约束条件的情况下,选择氢气压力pH2作为控制变量与选择氧气压力pO2相比,其控制效果相差甚远.因此,氧气压力pO2是系统的理想控制变量,选择其作为控制变量将会取得非常好的控制效果.
5 结论
对系统的控制对象施加模型预测控制,不仅能够获得良好的控制效果,同时也能够极大地缩短系统的响应时间.如果考虑系统的动态约束条件,质子交换膜燃料电池将兼备快速的响应速度和良好的鲁棒性,并且期望的输出设定值也能够被跟踪,稳态误差趋近于零.采用模型预测控制,PEMFC系统在整个状态空间中能够获得良好运动品质和理想的控制效果.
[1] Amphlett J C,Mann R F,Peppley B A,et al.Performance Modeling of the Ballard Mark-ⅣSolid Polymer Electrolyte Fuel Cell[J].Journal of Electrochemical Society,1995,142(1):9-15.
[2] Du Z,Li H,Gu T.A State of the Art Review on Microbial Fuel Cells:a PromisingTechnology for Wastewater Treatment and Bioenergy[J].Biotechnology Advances,2007,25(5):464-482.
[3] Logan B E.Scaling Up Microbial Fuel Cells and Other Bioelectrochemical Systems[J].Applied Microbiology and Biotechnolog,2010,85(6):1665-1671.
[4] Khan M J,Iqbal M T.Dynamic Modeling and Simulation of a Small Wind-fuel Cell Hybrid Energy System[J].Renewable Energy,2001,30(3):421439.
[5] Gondhalekar R,Jones C N.MPC of Constrained Discrete-time Linear Periodic Systems—A Framework for Asynchronous Control:Strong Feasibility,Stability and Optimality via Periodic Invariance[J].Automatica,2011,47(2):326-333.
[6] Qin S J,Badgwell T A.A Survey of Industrial Model Predictive Control Technology[J].Control Engineering Practice,2003,11(7):733-764.
[7] Hedjar R.Application of Nonlinear Rescaling Method to Model Predictive Control[J].International Journal of Control,Automation,and Systems,2010,8(4):762-768.
[8] Muske K R,Rawlings J B.Model Predictive Control with Linear Models[J].AIChE Journal,1993,39(2):262-287.
[9] Thammano A,Ruxpakawong P.Nonlinear Dynamic System Identification Using Recurrent Neural Network with Multi-segment Piecewise-linear Connection Weight[J].Memetic Computing,2010,2(4):273-282.
[10] Bradley E,Stolle R.Automatic Construction of Accurate Models of Physical Systems[J].Annals of Mathematics and Artificial Intelligence,1996,17(1):1-28.
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
国际放射医学核医学杂志(2020年4期)2020-07-27
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
Frontiers of Nursing(2018年1期)2018-05-21
车迷(2017年12期)2018-01-18
电子制作(2017年10期)2017-04-18
高中数理化(2016年19期)2016-11-14
西北工业大学学报(2015年4期)2016-01-19
太空探索(2014年6期)2014-07-10
汽车与新动力(2014年4期)2014-02-27
