
基于BP神经网络的SVPWM控制系统仿真研究
2013-11-01 07:39吕宏丽
唐山师范学院学报 2013年5期
吕宏丽,叶 双
(唐山学院 信息工程系,河北 唐山 063000)
脉宽调制PWM(Pulse-Width Modulation)是交流传动的技术支柱之一。电压空间矢量脉宽调制SVPWM(Space-Vector Pulse-Width Modulation)着眼于使电机获得幅值恒定的圆形旋转磁场。由于该控制方法把逆变器和电机看成一个整体来处理,所得模型简单,便于微处理器实时控制,同时具有转矩脉动小、噪声低、电压利用率高的优点[1]。
在实际应用中,SVPWM 控制信号的获得需要进行大量的三角函数运算,这些大量的运算可导致控制系统实时性变差。通过构造合理的神经网络可以有效逼近任意非线性函数,从而可避免大量的计算[2]。
1 SVPWM控制原理
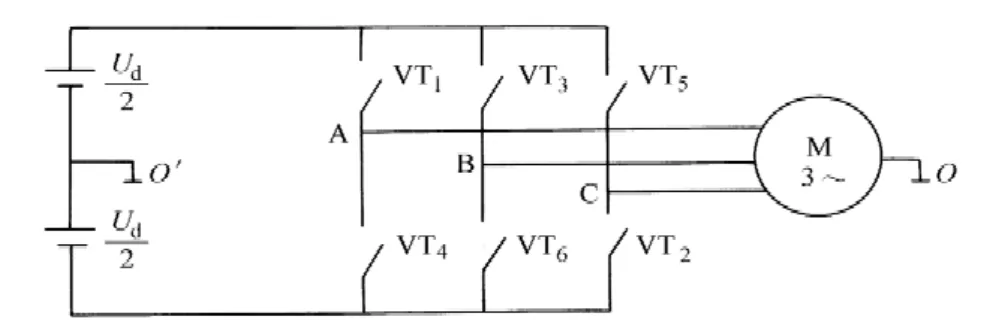
图1 三相逆变器电路原理图
如图1所示,在三相电压型逆变器中,3个桥臂由6个开关器件构成。6个开关器件共有8种开关状态(同一个桥臂的上下半桥的信号相反,“1”代表上桥臂导通,“0”代表下桥臂导通)。将三相正弦电压在一个工作周期内按每60°划分为1个扇区,则360°的电压空间共分为6个扇区,利用8种开关矢量,可以合成360°内的任何电压矢量。扇区划分和SVPWM控制波形如图2所示。
PWM 波形的获得通常由调制波和三角载波的交点间大小来决定。调制波信号函数如表1所示[3]。

图2 扇区划分及SVPWM波形

表1 三相调制波函数
2 BP神经网络的应用
人工神经网络是由大量处理单元互联组成的非线性、自适应信息处理系统,具有自学习功能。其中应用较为广泛的是BP神经网络,它是基于误差反向传播算法的多层前馈神经网络,其设计模型如图3所示。
输入信号为电压参考矢量的位置角θ,输出信号为SVPWM的三相调制信号波函数。利用BP神经网络的训练过程找到按照表1找到位置角θ与三相调制信号之间的非线性映射关系。
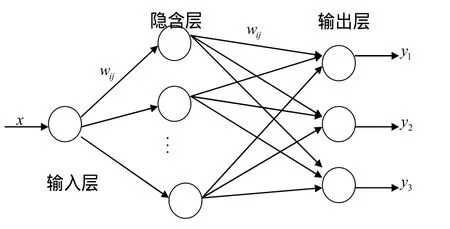
图3 BP神经网络模型
隐含层神经元数目的选择是一个十分复杂的问题,通常按照经验公式获得[4]:

其中m为输入层的节点数,n为输出层的节点数,t一般取1~10,因此本系统模型隐含层节点范围为3~12。
根据表1,θ从π2~0每隔π01.0取一个样本数据,一共取201组数据组成测试样本。在训练过程中最大训练次数设为 1 500次,训练目标误差为 0.002 8,学习速率为0.01,依次采用不同的隐含层节点数,当隐含层为10时训练次数最少,训练曲线如图4所示。
调用 gensim(net, -1)函数,把 BP神经网络生成一个Simulink模块,其输出为SVPWM的三相调制信号波函数,在本设计中调制系数取0.95,用SVPWM三相调制波与调制系数相乘,再与三角载波配合,最终得到SVPWM的波形。其模型发生模块如图5所示。
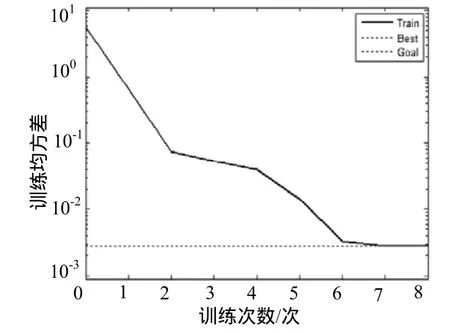
图4 隐含层为10时的训练曲线
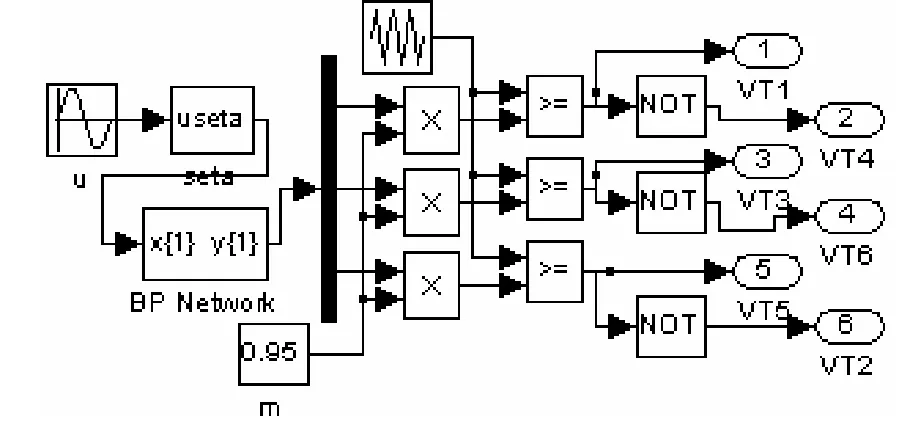
图5 SVPWM产生模块
3 电机控制系统的仿真应用
通过 Simulink模块搭建交流异步电动机控制系统模型,设置其逆变器直流电压为400 V,负载转矩为12 N·m,其具体的电机参数为[5]:PN=2.2 KW,UN=380 V,nN=1 423 r/min,RS=3.478 Ω, LS=0.012 5 H,Rr=2.546 Ω,Lm=0.012 26 H,p=2,J=0.013 1 kg·m2。
系统仿真模型如图6所示。

图6 电机仿真模块
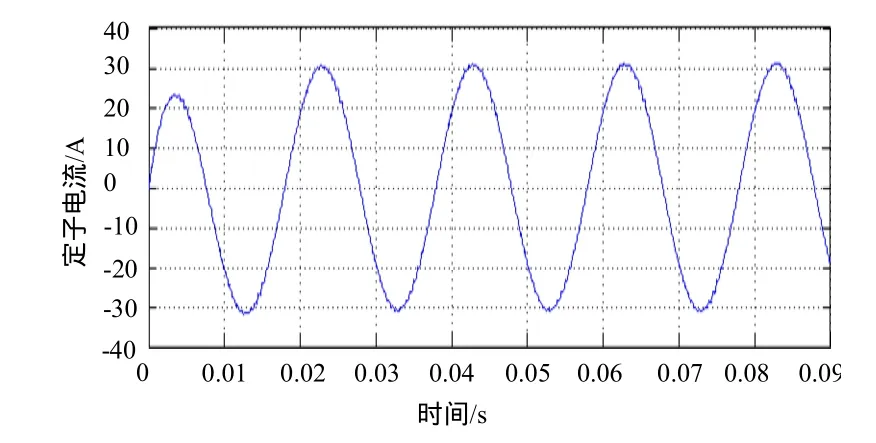
图7 定子电流波形图

图8 定子磁链波形图
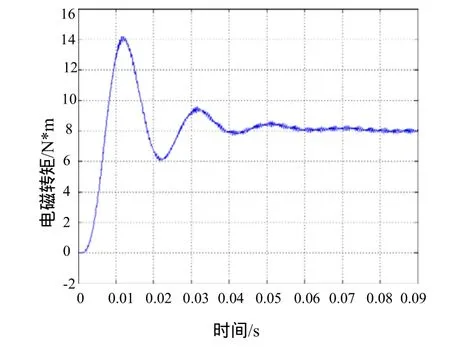
图9 电磁转矩波形图
图7 为系统定子电流波形,图8为定子磁链波形(其中,X轴表示定子磁链的d轴分量,Y轴表示定子磁链的q轴分量),图9为电磁转矩波形。图7、图8及图9表明在本次设计中利用神经网络产生的SVPWM对电机控制具有可行性。
4 结论
设计中基于BP神经网络产生SVPWM控制的三相调制波,仿真研究中定子电流输出波形为正弦波,且经过很短的时间就可以很稳定的输出,定子磁链为圆形的近似度高,达到SVPWM控制交流电动机的本质要求。
[1] 吴守葴,臧英杰.电气传动的脉宽调制控制技术(第2版)[M].北京:机械工业出版社,2004:168-183
[2] 蔡宝平,刘永红,张海峰,等.基于人工神经网络 SVPWM技术[J].电力系统及其自动化学报,2010,22(1):43-47.
[3] 阮毅,陈伯时.电力拖动自动控制系统—运动控制系统(第4版)[M].北京:机械工业出版社,2009:133-143
[4] 哈根.神经网络设计[M].北京:机械工业出版社,2002:325-340
[5] 林飞,杜欣.电力电子应用技术的 MATLAB 仿真[M].北京:中国电力出版社,2009:222-224.
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
南北桥(2022年2期)2022-05-31
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
中国民航大学学报(2019年1期)2019-04-13
电子制作(2019年23期)2019-02-23
信息安全研究(2018年2期)2018-02-28
