
高速三体船的快速性综合优化研究
2013-11-19 09:42杨松林潘亦鹏
江苏科技大学学报(自然科学版) 2013年4期
杨松林, 潘亦鹏, 李 密
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
三体船是当今造船界研究的优良船型之一[1-2],由于其优良的性能而得到重视和广泛研究.与一般单体船相比,三体船的3个瘦长船体使得这种船型的稳性很好,在高速时兴波阻力也很小,从而减小了对推进系统等各方面的要求.三体船的快速性是三体船各项性能中非常重要的一个性能,文中选用一型三体船船模,对其快速性进行优化[3].优化的方法主要有常规优化方法和现代优化方法两大类.常规优化方法常常会陷入局部最优,全局寻优能力差,一般不适合于多目标、多约束、多变量的复杂优化问题的求解.相比之下,现代优化方法中的遗传算法及其复合方法,就具备很强的全局寻优能力[4].近年来,遗传算法或模糊遗传等算法已被用于求解复杂船舶工程中的优化问题.所以本文采用了遗传算法作为寻优的主要算法,对三体船船模在快速性方面进行优化,得到一个最优解,从而确定了快速性综合优化的船型.
1 高速三体船航行性能快速性综合优化数学模型
1.1 设计变量
舰船快速性综合优化涉及的船型参数[5]较多,三体螺旋桨推进的排水型参数船包括:船长L、船宽B、吃水T、方型系数CB、浮心纵向位置LCB、螺旋桨直径DP、盘面比AE/AO、螺距比P/DP、螺旋桨转速N、设计航速VS、菱形系数CP、侧体纵向间距a、侧体横向间距b、设计水线面系数Cw、加载后重量m.为描述简单起见,将这15个设计变量用一个向量X表示,即可采用下列向量形式表示为:
X={x1,x2,x3,x4,x5,x6,x7,x8,x9,x10,x11,x12,x13,x14,x15}T
X={L,B,T,CB,LCB,DP,AE/AO,P/DP,N,VS,Cp,a,b,Cw,m}T
(1)
1.2 目标函数
为了评定排水型高速船舶快速性的优劣,选取与海军系数相类似的快速性衡准因子CSP作为快速性指数的目标函数[6].可选如下的公式为船舶快速性综合优化目标函数:
(2)
当高速三体船航行速度较高时(Fr>0.5时),主要选取如下的公式为高速三体船快速性综合优化目标函数:
(3)

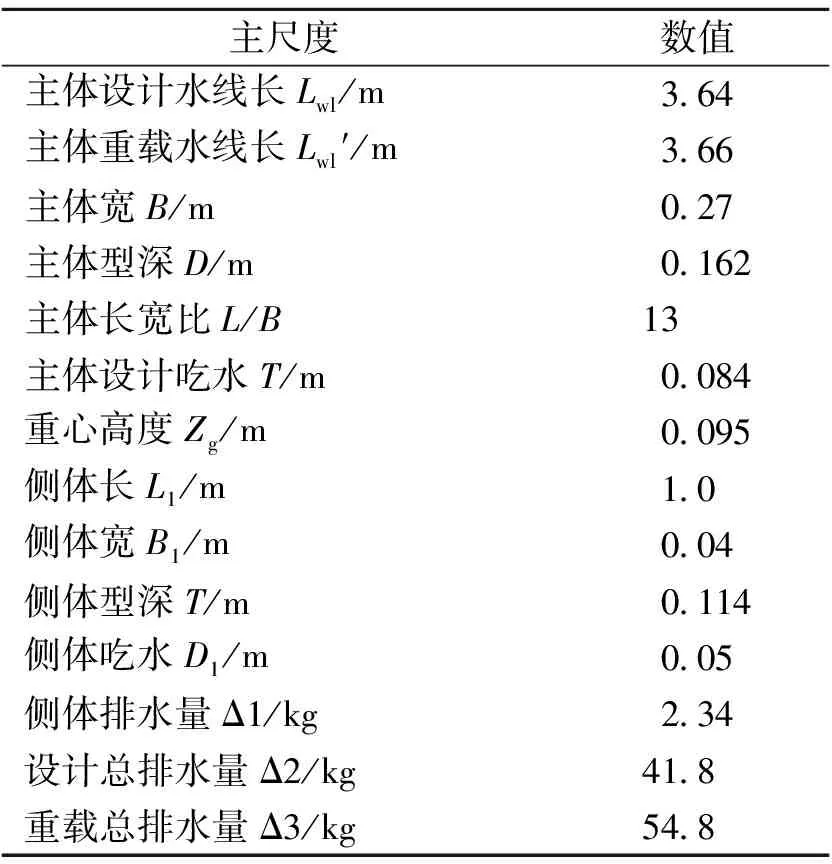
表1 船模主体尺度Table 1 Main dimensions of ship model
侧体排水量占主体的5%.图1中a,b分别为两侧体纵向和横向间距.
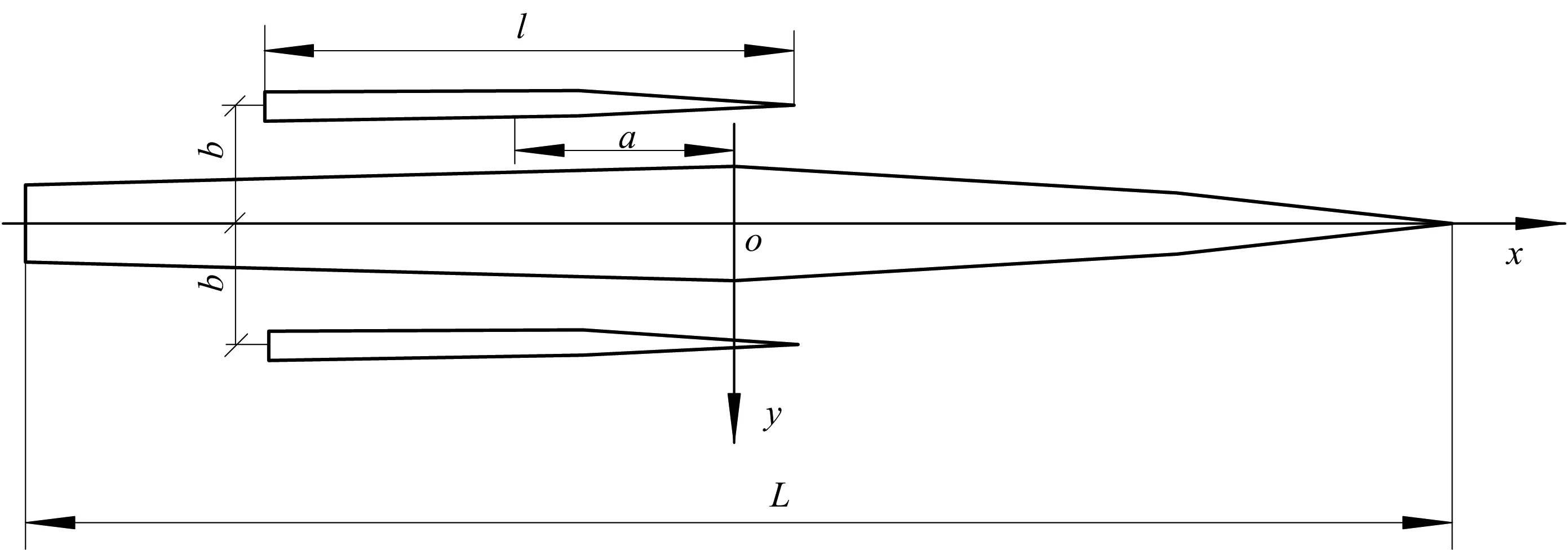
图1 三体船俯视图Fig.1 Overlooking view of trimaran
试验对傅汝德数Fr、侧体纵向位置、侧体横向位置、吃水进行变化,试验共分为12组,每组所测的速度点及相对应的Fr在0.22~0.66之间,将三体船侧体的纵向间距、横向间距、排水量这3个方面分别进行2,3,2次的变化试验,得到了不同搭配下的不同阻力,再利用MATLAB6.5的数组库得到四维数组,并编写接口程序,嵌入C++中,进行插值计算,得到剩余阻力系数Crm与Fr的关系(图2),对这些阻力进行优化插值计算,得到一个最优解,从而确定了快速性综合优化的船型.
以上是船舶航行性能快速性综合优化目标函数的主体,在VC++中建立其具体的数学模型来验证其准确性,并对其结果进行分析.由于船舶的航行性能涉及快速性、耐波性、操纵性中的各项参数,设计变量众多,故只选取主要经验公式和相关的参数来构成具体的数学模型.

图2 侧体在后部靠近船身时Crm随Fr变化Fig.2 Crm changing with Fr when side body near the back of hull
1.3 约束条件
首先,浮性作为最基本的航行性能是必须要满足的,故其排水量Δ应保持不变.其次,设计变量L/B、B/T、CB、LCB、DP、AE/A0、P/Dp、N和Vs的变化范围应在给定范围的约束条件之内;同时应满足作用力的相互平衡.约束条件具体可分为等式约束条件与不等式约束条件两类.
1.3.1 等式约束
等式约束有:满足浮性的排水量不变条件和转矩平衡条件,这是指设计状况下主机供给螺旋桨的转矩必须与螺旋桨吸收的转矩相等;力的平衡条件,即要求螺旋桨的有效推力必须与对应航速下船舶的阻力相等.
满足浮性条件:Δ=L×B×T×CB×ρ
螺旋桨推力与船舶航行的阻力相互平衡:
(4)
式中:Dp为螺旋桨直径;NP为螺旋桨的桨轴数;t为推力减额分数;R为船阻力.
设计状态下主机供给螺旋桨的转矩必须与螺旋桨吸收的转矩相等:
(5)
式中:PS为主机功率;ρ为水的质量密度;n为桨轴转速.
1.3.2 不等式约束
设计变量的取值范围:
按照海船稳性规范中初稳性高度GM的要求,必须满足如下不等式约束条件:
GM>0.3
此外,设计的螺旋桨需满足空泡要求,按Keller公式:
(6)
则不等式约束条件为
(7)
式中:P0为螺旋桨桨轴中心的静压;PV为在15oC时,水的汽化压力;T0为螺旋桨推力;Z为螺旋桨的桨叶数;K为常数,快速船为0,其他双桨船为0.1,单桨船为0.2.
2 综合优化算法与程序编写
2.1 遗传算法
随着计算机科技的不断进步,各类优化方法迅速发展并被广泛应用.由于常规优化方法易陷入局部最优,不适用于多峰寻优问题,采用遗传算法能比较有效地克服这一缺陷[7].所以本文主要用的是遗传算法.
遗传算法是从代表问题可能潜在的解集的一个种群开始的,而一个种群则由经过基因编码的一定数目的个体组成.每个个体实际上是染色体带有特征的实体.染色体作为遗传物质的主要载体,即多个基因的集合,其内部表现(即基因型)是某种基因组合,它决定了个体的形状的外部表现,如黑头发的特征是由染色体中控制这一特征的某种基因组合决定的.因此,在一开始需要实现从表现型到基因型的映射,即编码工作.由于仿照基因编码的工作很复杂,需要进行简化,如二进制编码,初代种群产生之后,按照适者生存和优胜劣汰的原理,逐代演化产生出越来越好的近似解,在每一代,根据问题域中个体的适应度大小选择个体,并借助于自然遗传学的遗传算子进行组合交叉和变异,产生出代表新解集的种群.这个过程将导致种群像自然进化一样,后生代种群比前代更加适应于环境,末代种群中的最优个体经过解码,可以作为问题近似最优解.
2.2 程序编写
程序部分分为3块,分别是快速性综合优化目标函数、遗传算法和主函数程序.每一块都用C++汇编语言进行编写,需要重点说明的是,快速性目标函数中的剩余阻力系数是在C++中调用了Matlab进行的插值计算.
高速三体船的剩余阻力系数根据试验确定.只需根据三体船的排水量、侧体的横向间距、侧体的纵向间距和傅汝德数进行四维插值便可得出剩余阻力系数.
首先要在C++程序中输入原始数据,也就是4个指标相对应的剩余阻力系数.然后编写打开Matlab引擎程序,把初始数据导入Matlab中.在Matlab进行四维插值,得出相应指标下的剩余阻力系数,最后通过指针导出到C++程序中,退出Matlab,进行下一步计算.
3 优化计算及结果分析
船舶的快速性综合优化计算至少涉及到15个设计变量,包括3个等式约束和5个不等式约束,若记入变量上下限约束,则不等式约束将多达30个.显然,这是一个非常复杂的工程优化问题.文中采用如上所述的遗传算法数学模型编制了计算程序[4].
3.1 优化计算
限于篇幅,本文仅以试验三体船为例,并与相应的单体船进行比较分析.该船优化设计变量范围见表2.
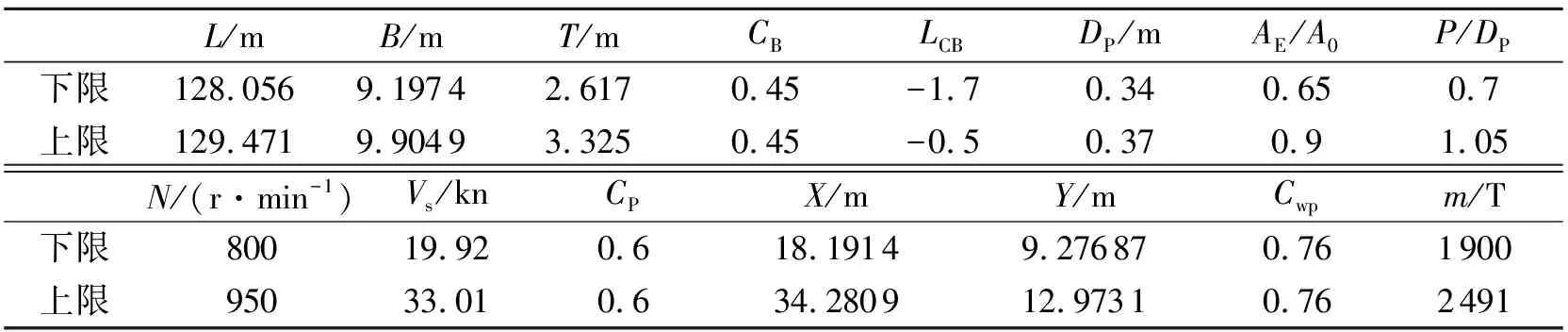
表2 设计变量范围Table 2 Range of designed variables
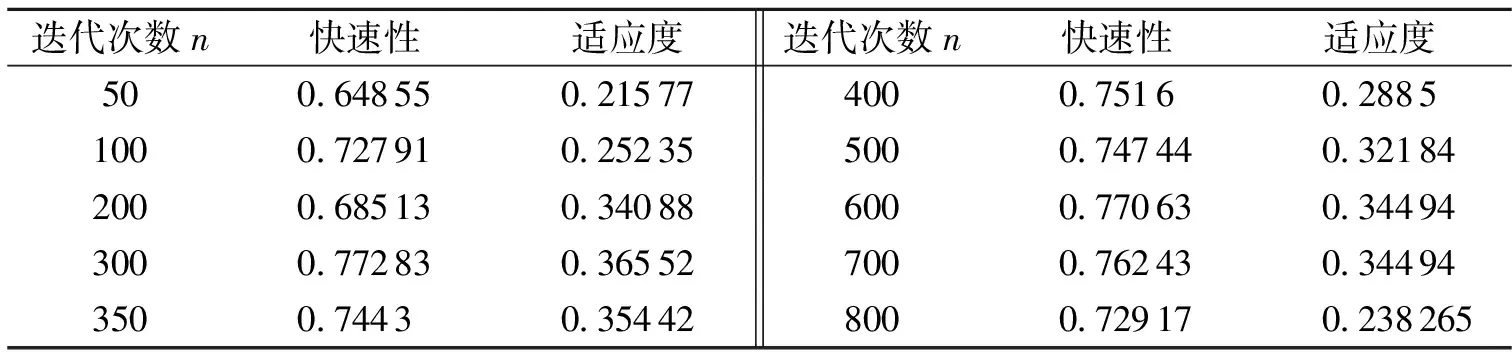
表3 初定权重下计算各迭代次数n的目标函数值及适应度Table 3 Objective function value and fitness of each calculate the number of generations in initial weights
在这些变量和约束条件下分别按50,100,200,300,350,400,500,600,700,800次迭代次数各计算2次.所得的结果分别取最大值得到的结果(表3).
3.2 优化结果分析
3.2.1 优化稳定代数分析
将计算所得的结果绘成曲线(图3).

图3 快速性函数随迭代次数变化曲线Fig.3 Rapidity index curve changing with computational number of generations
图3中纵坐标的值为优化计算后各个目标函数的值,横坐标为遗传算法迭代次数.
由图3可见,迭代次数在300次以后曲线基本稳定,变化幅度不大,且其适应度处在最高水平.若再计算更多代数意义不大,而且用目前最新的CPU为i5-2410计算机计算一代所耗时间为4.5 s,计算300代时间为1 350 s,约22.5 min,而计算500代为2 250 s,约37.5 min,计算800代要3 600 s,约60 min.300代以后,计算时间过长,结果变化不大,所以把300代定为最佳优化稳定代数.
3.2.2 快速性指数f(x)在Fr为0.32~0.44之间随速度变化曲线(图4)
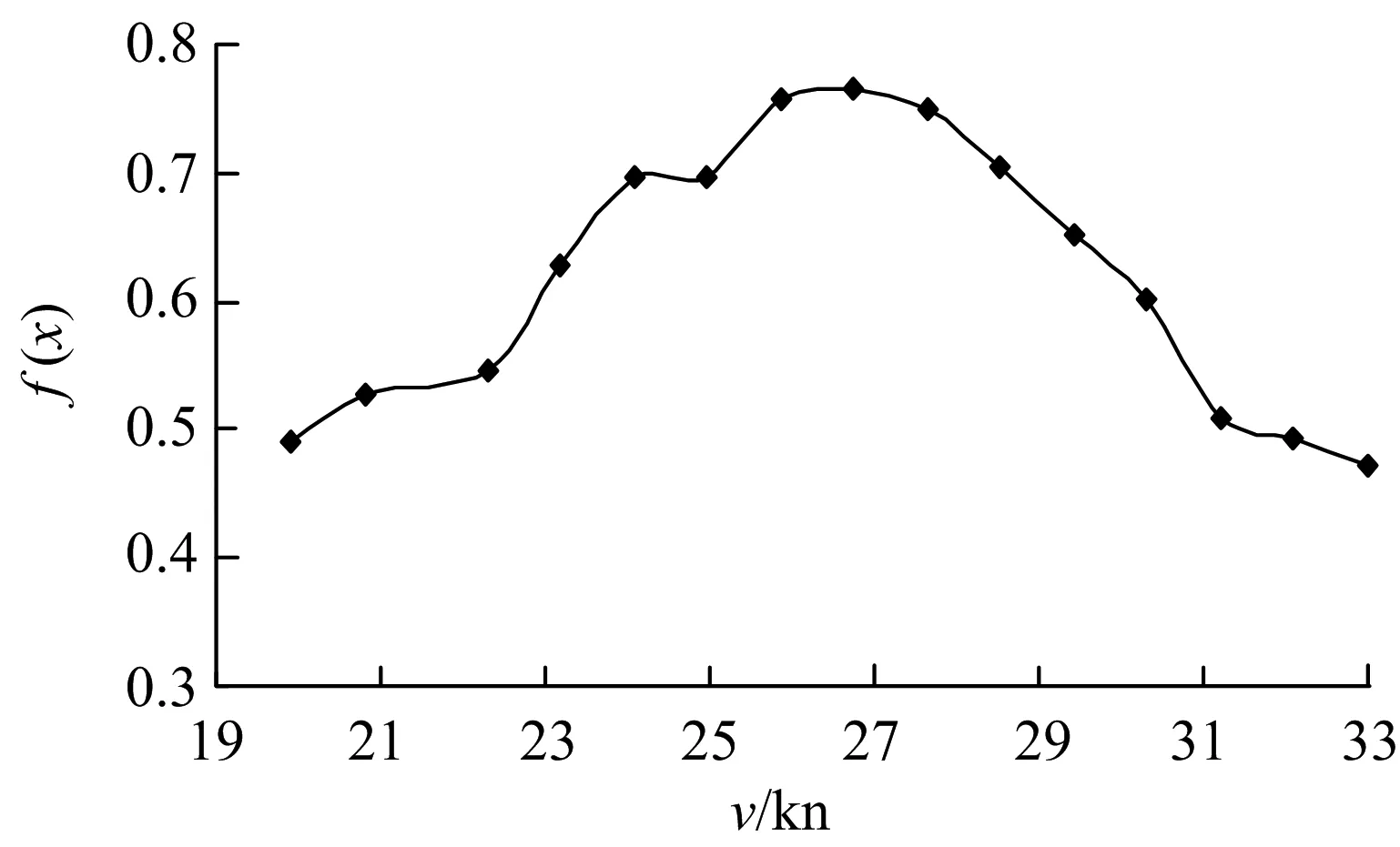
图4 快速性指数随速度变化曲线Fig.4 Rapidity index curve changes with the speed
由图4可以看出,设计变量范围内在26~27 kn之间快速性指数获得最大值,低于或高于此速度快速性指数都会下降.相比之下我国江卫级导弹护卫舰的排水量为2 180 t,最大航速25 kn,功率为约10 584 kW,此时的海军系数为0.397.而设计的三体船在排水量为1 902 t、航速为24.98 kn时的功率为8 544 kW,海军系数为0.452,比江卫级高13.8%.说明此型三体船在航速为25~27 kn时有较好的航行性能,可作为以后的巡航速度.
3.2.3 三体船的快速性指数随船长L的变化
图5为根据表4绘制的曲线.从图5可以看出,快速性指数在船长L为114.6~146.5 m之间随船长增加呈上升趋势,与长宽比越大快速性越好的船体性能吻合,说明了本程序的可靠性.

表4 船长在114.6~146.5 m之间变化时快速性指数的值Table 4 Rapidity index value changes with the ship length between 114.6~146.5 m

图5 快速性指数随船长变化曲线Fig.5 Rapidity index curve changes with the ship length
4 结论
研究了高速三体船的快速性,并参考相关的材料,得出高速三体船快速性目标函数的具体形式及约束条件,利用三体船试验所测得的剩余阻力计算出剩余阻力系数,利用Matlab中的数据库建立四维数组,提高了优化的准确性.最终确定了优化稳定代数、快速性指数在Fr为0.32~0.44之间随速度变化的曲线和三体船的快速性指数随船长变化的值.虽然计算时用C++调用Matlab 6.5的速度较慢,但Matlab 6.5的可靠性、高精度、稳定性对计算非常有利.探求了快速性的稳定代数,对高速三体船的进一步综合优化研究有重要意义.
[1] 周洪光,马爱民,夏朗.无人水面航行器发展[J]. 装备研究,2009,30(6):17-19.
Zhou Hongguang, Ma Aiming, Xia Lang. A research on the development of the unmanned surface vehicles[J].NationalDefenseScience&Technology,2009,30(6):17-19.(in Chinese)
[2] 况小梅.水面高速无人艇的概念设计研究[D].黑龙江,哈尔滨:哈尔滨工程大学,2007:04-12.
[3] Brizzolara S,Bruzzone D.Hydrodynamic optimisation of high-speed trimaran hull forms[C]∥ProceedingsoftheEighteenth(2008)InternationalOffshoreandPolarEngineeringConferenceVancouver.BC,Canada:[s.n.],2008:6-11.
[4] Zhang Baoji,Ma Kun,Ji Zhuoshang.The optimization of the hull form with the miniumn wave making resistance based on rankine source method[J].JournalofHydrodynamics,2009,2 l(2):277-284.
[5] 周广利,黄德波,邓锐,等.三体船阻力性能的模型系列试验研究[J]. 哈尔滨工程大学学报2010,31(5):576-583.
Zhou Guangli, Huang Debo, Deng Rui,et al.Investigating resistance of a range of trimaran designs[J].JournalofHarbinEngineeringUniversity,2010,31(5):576-583.(in Chinese)
[6] Javanmardi M R,Jahanbakhsh E.Hydrodynamic analysis of trimaran vessels[J].PolishMarltimeResearch,2008:11-18.
[7] Mizine I,Karafiath G,Queutey Patrick,et al.Interference phenomenon in dsign of trimaran ship[C]∥ 10thInternationalConferenceonFastSeaTransportation,FAST ,Athens, Greece:[s.n.],2009.
[8] 李培勇,冯铁城,裘泳铭.三体船横摇运动[J].中国造船,2003,44(3):25-30.
Li Peiyong, Feng Tiecheng, Pei Yongming. Investigation of trimaran roll motion characteristics[J].ShipbuilfingofChina,2003,44(3):25-30.(in Chinese)
[9] 李培勇,裘泳铭,顾敏童,等.三体船阻力模型试验[J].中国造船,2002,43(4):6-12.
Li Peiyong, Pei Yongming. Gu Mintong,et al.Experimental investigation on resistance of trimaran[J].ShipbuildingofChina,2002,43(4):6-12.(in Chinese)
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
航空发动机(2020年3期)2020-07-24
中国惯性技术学报(2020年2期)2020-07-24
中学科技(2017年10期)2017-11-04
舰船科学技术(2016年1期)2016-02-27
船海工程(2015年4期)2016-01-05
中国舰船研究(2014年1期)2014-05-14
中国中医药现代远程教育(2014年17期)2014-03-01
自然资源遥感(2014年2期)2014-02-27
