数字印模口内三维扫描技术研究
2013-11-26 06:45吴庆阳曾祥军黄锦辉
深圳大学学报(理工版) 2013年1期
吴庆阳,曾祥军,黄锦辉,贺 威
深圳市微纳光子信息技术重点实验室,深圳大学电子科学与技术学院,深圳518060
随着科学技术的发展,基于计算机辅助设计/制作 (CAD/CAM)的口腔修复系统逐渐成为口腔医师重要的治疗手段[1-4].牙齿三维数据的测量是口腔修复CAD/CAM系统的重要组成部分,也是进行口腔修复体设计与制作的前提条件.根据数据获取的方式,牙齿三维数据测量系统可分为口外扫描系统和口内扫描系统[5-8].口外扫描方式需医生先对口腔进行印模获取牙齿的石膏模型,再利用三维扫描设备对石膏牙模进行扫描得到其三维数字模型.口内扫描方式则是将探测器伸进口腔直接对牙齿进行扫描从而获得牙齿的三维数字模型.该方式操作简单、高效且测量速度快,因而节省了医生的操作时间,又因无需手工印模,亦避免了因制模和翻模引起的误差[9-10],所以测量精度较高.因此,口内三维扫描技术有望取代口外扫描成为口腔修复CAD/CAM系统的关键技术.
基于三角法的光学三维测量技术,因具有非接触、测量速度快及精度高等优点已广泛用于诸多领域[11-13].然而,这种测量技术的原理使该系统结构难以微型化[14],限制了该技术在口腔等空间受限领域的应用.本研究设计了一种可在狭窄空间进行传像的光学导管结构,和基于硅基液晶 (liquid crystal on silicon,LCoS)面板的微型投影系统,用以解决条纹投影三维测量技术在口内三维扫描中受口腔空间制约的问题,实现条纹编码图像在口腔内的投影和采集.
1 相位测量与重建原理
条纹投影三维测量,也称结构光投影三维测量,主要测量方法为相位测量轮廓术[15].该测量系统的基本结构由投影系统、成像系统和计算机3部分组成.如图1,投影系统将含有相位信息的光栅图像投影到被测物体表面,光栅图像因受到物体表面轮廓的调制而发生变形;成像系统采集变形的光栅图像数据并将其传输给计算机;计算机对变形的光栅图像进行处理并计算出表示被测物体高度的相位信息,再根据相位信息和已标定好的系统结构参数重建物体的三维几何信息.

图1 条纹投影三维测量原理Fig.1 Principle of 3D measurement based on fringe projection
提取相位信息的方法主要有傅立叶变换法和相移法.前者因只需投影一幅光栅条纹图像,测量速度快,但在测量表面复杂的物体时相位展开容易出错;后者需投影若干幅相位场移相的光栅条纹图像,速度相对较慢但解得的相位稳定性好且准确度高.本测量系统采用四步相移法提取相位信息,该方法通过投影4幅依次平移1/4周期的正弦图像,得到

其中,i表示投影第i幅正弦图像,在本测量系统中i=1,2,3,4;Ⅰi(m)为物体表面的光强分布;Ⅰ'(m)为背景光强分布;Ⅰ″(m)为条纹对比度;φ(m)为物体表面的绝对相位.
若令φ(m)=2kπ+φ'(m)表示相位级次,其中k为整数,φ'(m)为折叠相位,结合式 (1)得

利用格雷码部分编码[16]的方法求得条纹级次k的值,并根据k值展开折叠相位得到绝对相位φ(m).
三维数据点的重建是基于直接线性变换 (direct linear transformation,DLT)算法.设 (u,v)为被测点的像素坐标,(x,y,z)为对应的空间三维坐标,φ为绝对相位,ai、bi和ci为常量系数.则像素点和对应空间点之间的映射关系用多项式表达为
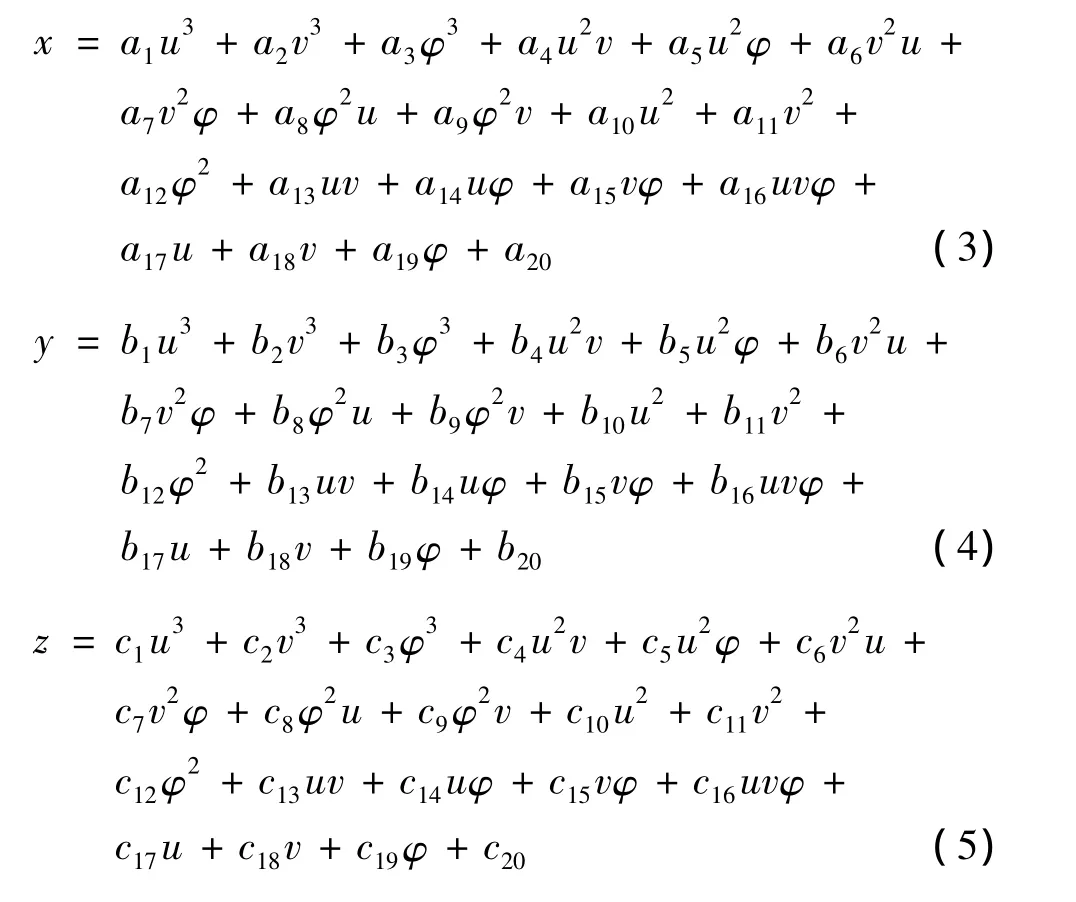
这种标定方法原理简单、操作方便且标定精度较高.原理如图2,首先将2D平面标靶固定在平移台上,沿与标靶平面垂直方向移动n个位置(P1,P2,…,Pn),投影并采集标靶在每个位置上的图像,以P1标靶所在平面为x-o-y平面、移动方向为z方向建立空间坐标系o-xyz,由于标靶上特征点的位置已知,且标靶移动的距离也是已知,因此可直接得到每个标靶上的特征点在空间坐标系o-xyz下的三维坐标(x,y,z).然后通过采集图像提取出对应特征点的像素坐标(u,v)和绝对相位值φ(u,v).最后,将所有特征点的 (x,y,z)、(u,v)和 φ(u,v)代入式(3)~式(5)可估算出所有ai、bi和ci的值.
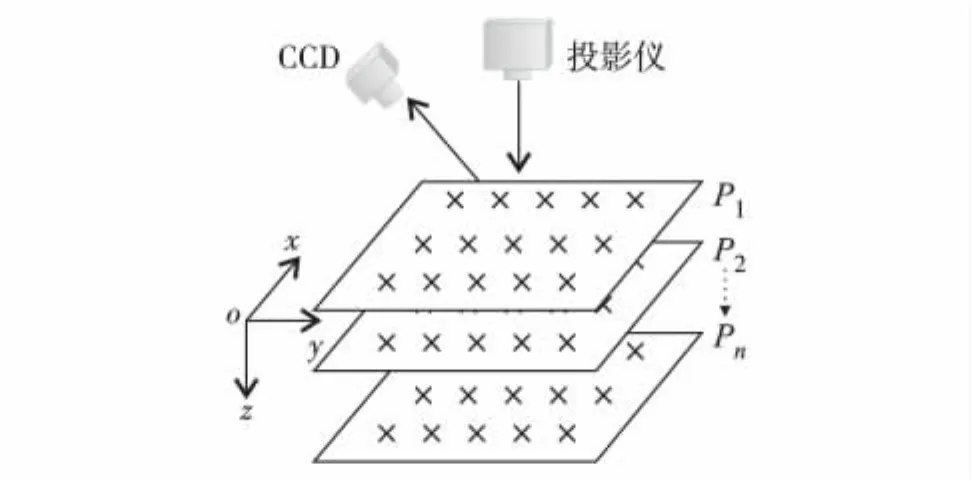
图2 系统标定原理Fig.2 Principle of system calibration
2 系统结构
考虑到口腔内部空间有限,所设计的系统结构必须尽可能紧凑且灵活,以保证仪器体积小且操作简单.通过综合分析口腔环境,本研究设计了如图3的口内三维扫描仪的系统.该系统的结构主要由光学导管、数字图像投影系统、成像系统及计算机组成.数字投影系统生成数字条纹和编码图像并通过光学导管将它们投射到口内牙齿表面.成像系统利用光学导管对牙齿表面的投影图像进行采集.计算机则用于读取采集图像并完成三维重建.
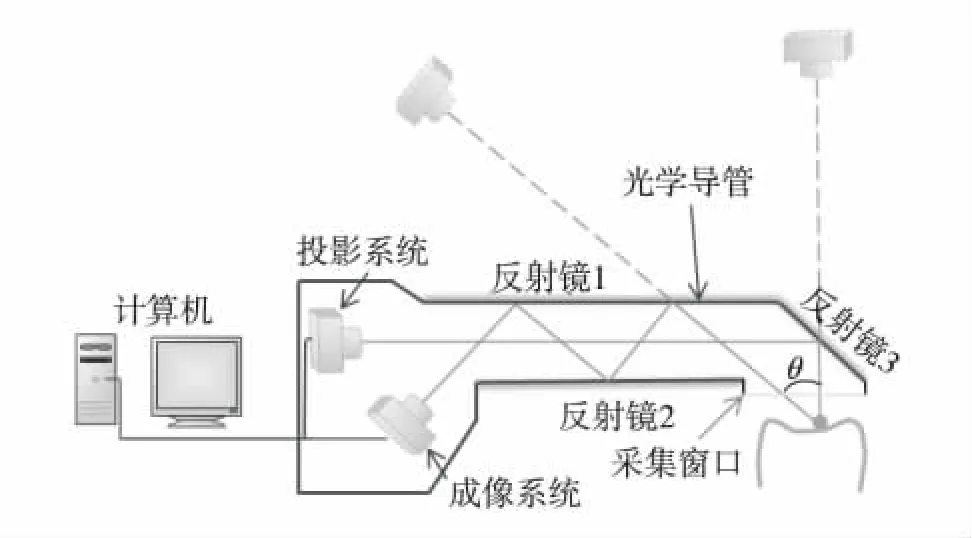
图3 口内三维扫描仪系统结构Fig.3 Structure of intraoral 3D scanning system
2.1 光学导管
结构光投影三维测量的原理是基于光学三角法,要求投影方向与成像方向成一定的夹角θ,如图3,虚线部分为投影系统和成像系统在传统测量系统中的位置,两者与被测物点之间成三角关系.因口腔空间有限且牙齿处于口腔内部,所以传统的扫描系统在测量时投影光或成像光容易受到遮挡,使其难以直接用于口内扫描.为此,本研究设计了一种细长型的光学导管作为系统的探测头进行传像,导管长为160 mm,横截面为22 mm×25 mm,可相对灵活地在口腔内活动使其能从不同角度对牙齿进行测量.光学导管的结构如图3,导管内部的上下表面为反射面相对的两面平面反射镜,目的是改变成像光的传播方向使得成像光被压缩在导管内部;前端是一面为20 mm×30 mm的平面反射镜,与两面平行反射镜约呈45°夹角,用于改变投影图像的投射方向.前端侧面有一个20 mm×30 mm的图像采集窗口.首先,投影系统沿导管方向投射条纹图像,图像经反射镜3反射后从采集窗口相对正面地投射到牙齿表面,然后成像光与投影光成θ角从采集窗口进入光学导管,经导管内上下两面平面反射镜多次反射后从另一端口输出,最后被成像系统接收,从而实现了条纹图像在口腔内的投影和采集.
2.2 数字图像投影系统
数字图像投影系统负责完成数字条纹和编码图像的投影.普通的数字投影仪主要用于多媒体信息显示,其特点是投影光束的发散角较大,即随着投影距离的加长投影图像的尺寸会大幅度增大,不利于投影图像在狭长的光学导管内传输.为满足测量要求,本研究结合口腔内部的空间特点和光学导管的尺寸,采用LCoS[17]面板设计了一套投影系统.该系统的投影距离为240 mm,投影图像尺寸为22 mm×16.5 mm,景深为12 mm,以满足系统测量的要求.
2.3 成像系统和计算机
成像系统由成像镜头和图像传感器 (charge coupled device,CCD)组成,成像镜头将由光学导管传送进来的图像成像,CCD传感器在成像面对图像进行记录并存储到计算机,再由计算机利用采集图像完成三维重建并显示三维点云数据.
3 结果与分析
根据系统结构制作的口内三维扫描仪的初始模型,其结构如图4.硬件设备为:PENTAX(宾得)公司的成像镜头,焦距为35 mm;Point Grey公司的Flea2 CCD图像传感器,分辨率为1 280×960,像元尺寸为3.75 μm;LCoS面板尺寸为8.94 mm ×6.71 mm,分辨率为640×480,比例为4∶3,像元尺寸为13.8 μm,刷新频率为120 Hz;功率为1 W的蓝光LED光源及用于准直光源和投影图像的光学透镜.

图4 口内三维扫描仪实物结构图Fig.4 Physical structure of intraoral 3D scanner
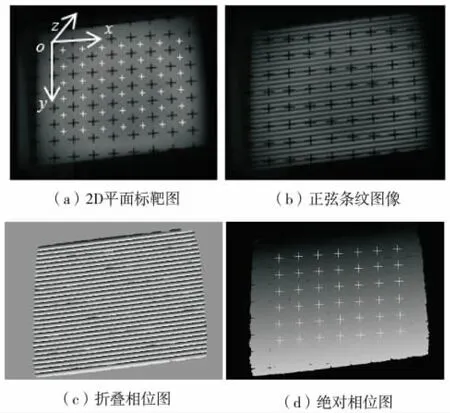
图5 2D平面标靶Fig.5 2D planar target
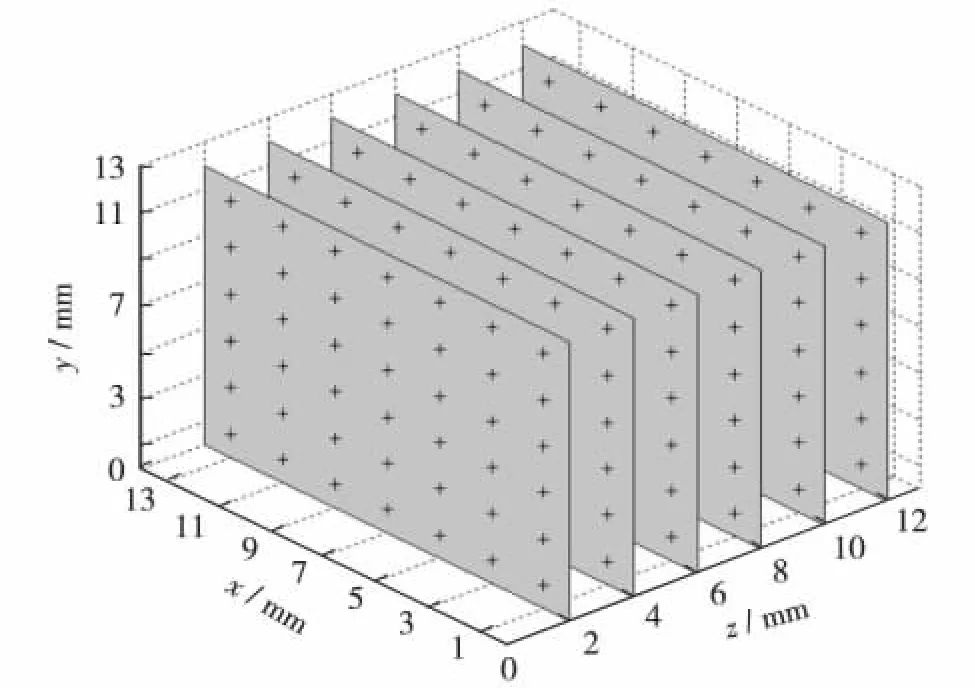
图6 空间三维特征点Fig.6 Spatial 3D feature points

图7 口内三维扫描仪原型Fig.7 Prototype of the intraoral 3D scanner
如图5(a),采用十字叉丝2D平面标靶对系统进行标定,叉丝中心点的间距为2 mm.选择初始位置的标定靶平面为x-o-y平面,左上角的叉丝点为坐标原点,平面方向为z方向建立空间三维坐标系o-xyz.将标定靶固定在平移台上,沿空间坐标系z方向移动12 mm,每移动2 mm拍摄一组条纹和编码图像.图5(b)为采集得到的其中一幅正弦条纹图.图5(c)为由4幅正弦条纹图计算得到的折叠相位图.选取相邻4个叉丝点形成的矩阵中心作为特征点,如图5(a)白色叉丝点,得到在o-xyz坐标系下所有特征点的三维坐标(x,y,z)如图6,然后计算出这些特征点在图像中的坐标(u,v)及对应的绝对相位值φ(u,v).其中,图5(d)为计算得到的绝对相位图,图上叉丝点为特征点在图像中的位置,将所有特征点所对应的(x,y,z)、(u,v)及 φ(u,v)代入式(3)~ 式(5),解得标定系数(ai,bi,ci).
图7演示了利用系统模型对石膏牙模的两颗磨牙进行测量的示例.从图7可观测到测量过程中投影到牙模表面的条纹图案.测量结果如图8.
为评测系统的测量精度,对一个标准平面 (平整度为1 μm)进行测量,利用最小二乘法对测得的三维点云数据进行平面拟合,结果如图9.计算分析得到三维点云与拟合平面的最大偏差为55.7 μm,平均偏差为5.4 μm,标准差为4.1 μm.
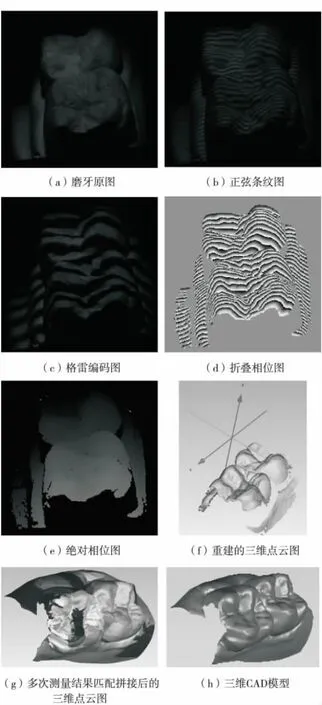
图8 牙颌模型测量结果Fig.8 Measurement of dental model
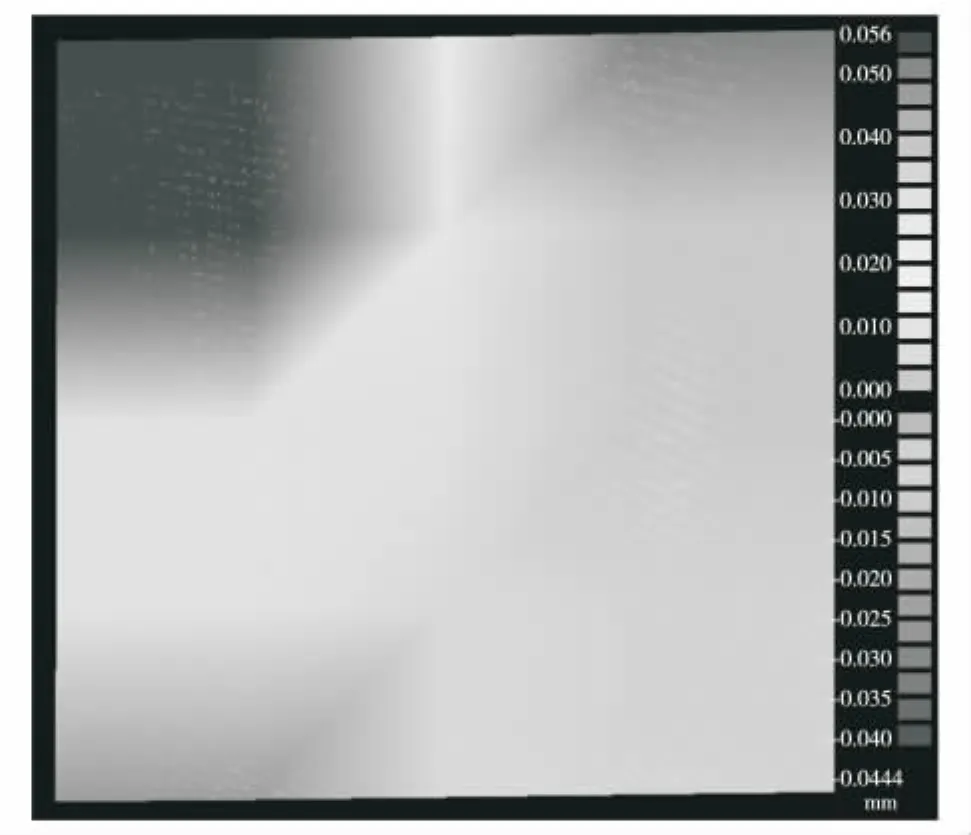
图9 标准平面测量结果Fig.9 Measurement of standard plane
结 语
提出一种直接在口腔内部进行扫描,实时获取牙体和软组织三维形貌的新型数字印模方法.采用LCoS面板设计了数字图像投影系统,其投影图像的大小为 22.0 mm ×16.5 mm,景深高达 12 mm,单次扫描可测量一到两颗牙齿.利用平面反射镜设计了一种光学导管进行传像,实现了条纹和编码图像在口腔内的投影和采集.实验对石膏牙模进行了测量,同时还利用标准平面对测量系统进行了精度评测,结果表明,该方法测量精度可达4 μm,能够满足口腔三维测量的需要.
/References:
[1] Lu Peijun,Li Yansheng,Wang Yong,et al.The research and development of CAD-CAM system in restorative dentistry[J].Chinese Journal of Stomatology,2002,37(5):367-370.(in Chinese)吕培军,李彦生,王 勇,等.国产口腔修复CADCAM系统的研究与开发 [J].中华口腔医学杂志,2002,37(5):367-370.
[2] Lu Peijun,Sun Yuchun.Past,present and future of prosthodontics computer-aided design/production [J].Journal of Peking University Health Sciences,2010,42(1):14-19.(in Chinese)吕培军,孙玉春.口腔修复计算机辅助设计/制作的过去、现在和将来 [J].北京大学学报医学版,2010,42(1):14-19
[3] Feng Li,Wang Jie,Li Yajuan.Status and prospects of the applications of computer-aided design and production system in Prosthodontics[J].Journal of Modern Stomatology,2007,21(4):430-431.(in Chinese)冯 莉,王 洁,李雅娟.计算机辅助设计和制作系统在口腔修复学中应用的现状与展望[J].现在口腔医学杂志,2007,21(4):430-431.
[4] Miyazaki T,Hotta Y,Kunii J,et al.A review of dental CAD/CAM:current status and future perspectives from 20 years ofexperience [J]. DentalMaterialsJournal,2009,28(1):44-56.
[5] Yuan Tianran,Liao Wenhe,Cheng Bisheng,et al.Research on gum tissue deformation simulation techniques[J].Journal of Shenzhen University Science and Engineering,2010,27(1):21-27.(in Chinese)袁天然,廖文和,程彼胜,等.牙龈软组织变形仿真技术研究 [J].深圳大学学报理工版,2010,27(1):21-27.
[6] Quaas S,Rudolph H,Luthardt R G.Direct mechanical data acquisition of dental impressions for the manufacturing of CAD/CAM restorations [J].Journal of Dentistry,2007,35:903-908.
[7] Kühmstedt P,Bräuer-Burchardt C,Munkelt C,et al.Intraoral 3D scanner[C]// Proceeding ofSPIE.[s.l.]:SPIE,2007,6762:67620E.
[8] Riehemann S,Palme M,Kuehmstedt P,et al.Microdisplay-based intraoral 3D scanner for dentistry [J].Journal of Display Technology,2011,7(3):151-155.
[9] Persson A S K,Agenta O,Matts A,et al.Digitization of simulated clinical dental impressions:virtual three-dimensional analysis of exactness[J].Dental Materials,2009,25:929-936.
[10] Christensen G J.Will digital impressions eliminate the current problems with conventional impressions?[J].The Journal of the American Dental Association,2008,139(6):761-763.
[11] Wu Yingchun,Cao Yiping,Xiao Yanshan.A new method of actively modifying the grating to improve the accuracy of on-line three-dimensional inspection [J].Chinese Journal of Lasers,2011,38(9):0908009.(in Chinese)武迎春,曹益平,肖焱山.一种主动修正投影光栅提高在线三维测量精度的方法 [J].中国激光,2011,38(9):0908009.
[12] Salvi J,Fernandez S,Pribanic T,et al.A state of the art in structured light patterns for surface profilometry[J].Pattern Recognition,2010,43:2666-2680.
[13] Zhang Xiaohu,Ou Jianliang,Yuan Yun,et al.Stack-Yard 3D measurement based on photogrammetry and projected contour aiding [J].Acta Optica Sinica,2011,31(6):0612002.(in Chinese)张小虎,欧建良,苑 云,等.投影轮廓线辅助下的堆场三维形貌摄影测量研究 [J].光学学报,2011,31(6):0612002.
[14] Schick A,Forster F,Stockmann M.3D measuring in the field of endoscopy[C]//Proc SPIE 8020,Optical Measurement Systems for Industrial Inspection VII.Munich(Germany):SPIE,2011,8082:808216.
[15] Liu Yuankun,Su Xianyu,Zhang Qican.A novel phase order self-encoding technique for phase measurement profilometry [J].Acta Optica Sinica,2011,31(11):1111002.(in Chinese)刘元坤,苏显渝,张启灿.三维成像中相位级次自编码的相位测量方法 [J].光学学报,2011,31(11):1111002.
[16] Huo Jincheng,Wu Qingyang,Zeng Xiangjun,et al.Partial coding structured light technique for three-dimensional shape measurement[J].Opto-Electronic Engineering,2012,39(5):57-62.(in Chinese)霍金城,吴庆阳,曾祥军,等.部分编码结构光三维测量技术的研究 [J].光电工程,2012,39(5):57-62.
[17] Zhang Jiyan,Liu Weiqi,Liu Hua,et al.Optical engines for high-performance LCoS projection systems[J].Chinese Journal of Liquid Crystals and Display,2005,20(6):539-543.(in Chinese)张继艳,刘伟奇,柳 华,等.高性能LCoS投影系统光引擎 [J].液晶与显示,2005,20(6):539-543.
猜你喜欢
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
小福尔摩斯(2019年2期)2019-09-10
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
测绘工程(2018年3期)2018-03-20
测绘学报(2015年4期)2015-01-14
娃娃画报(2014年9期)2014-10-15