
多相机同步曝光及GPS时间校正的处理与实现
2013-12-06 08:54林辉,石波,赵倩,吴玮,徐瑞
测绘工程 2013年2期
林 辉,石 波,赵 倩,吴 玮,徐 瑞
(1.山东科技大学 信息与电气工程学院,山东 青岛 266590;2.山东科技大学 测绘科学与工程学院,山东 青岛 266590)
随着摄影测量的不断发展,相机摄影被广泛应用到飞艇、无人机、室内定轨等空中测量领域中,并且有着广泛的应用前景。因此,以飞艇、无人机、室内定轨等为遥感平台、普通数码相机为主要遥感器件的低空摄影测量成为国内外遥感与摄影测量领域的热点问题。由于遥感平台高度的限制,一次所获单幅摄像覆盖范围一般不大。为了扩大摄像视场范围,及时、准确、全面地反映出整个区域的情况,需要采用多相机对地面同一坐标同时拍摄,大大增加了摄像覆盖范围。
目前,市场上应用的同步曝光控制模块大多数是通过单片机控制多相机同步曝光,对于相机完成曝光后每台相机的完成情况不能够全面地反映出来,这样对相机的漏拍、延迟拍摄不能够进行及时处理,容易造成相机图像的缺失,并且时间显示功能不准确,不能与GPS时间相同步,从而影响后期的数据处理。
基于以上的缺点,本文介绍新型的相机同步曝光控制模块,以单片机为核心控制多台相机同步曝光,捕捉相机曝光的反馈信号并进行及时处理,并且通过外部中断,对同步控制模块进行GPS时间校正,进一步增加了模块的稳定性。
1 同步曝光模块硬件电路设计
1.1 硬件电路设计
如图1所示,单片机的时间信息接收模块接收GPS时间接收机的时间信息和时间脉冲,RTC(实时时钟)芯片连接单片机的RTC模块,单片机曝光信号控制模块控制4路(代替多路相机说明,下同)相机的曝光部分,4路相机反馈信号连接单片机的反馈信号检测模块。
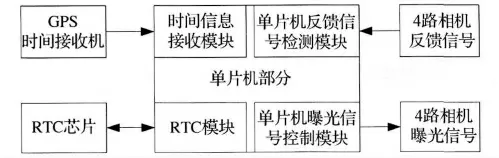
图1 硬件电路连接示意图
2 多相机同步曝光及曝光反馈信号的软件部分处理与实现
2.1 多相机同步曝光的实现
单片机接收到外部请求曝光信号时,4路管脚立即动作并延时,由于相机曝光的动作有机械延时,只有当单片机4路管脚延时的时间大于相机的机械动作时间时4路相机才发生曝光动作。如果相机未发生曝光动作,程序立即返回并重新请求曝光。具体流程如图2所示。

图2 多相机同步曝光实现流程
2.2 多相机同步曝光反馈信号的处理与实现
2.2.1 多相机同步曝光反馈信号的处理
相机发生曝光动作,单片机捕捉相机曝光后的反馈信号,通过逻辑运算将多路反馈信号反映到反馈信号标志(CAM_MARK),如果4路相机全部曝光并且曝光的最快反馈信号与最慢反馈信号的时差很短,则认为达到预期效果并结束循环;如果4路相机全部曝光,但是捕捉到的最快反馈信号与最慢反馈信号时差很长,则认为4路相机曝光不同步,返回循环并重新补拍;如果未完全捕捉到4路相机的反馈信号,则认为4路相机未完全曝光,返回循环并重新补拍。具体流程如图3所示。
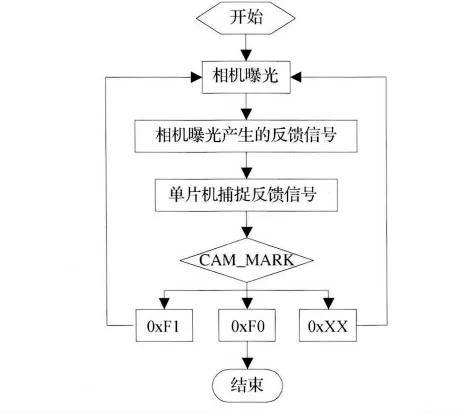
图3 4路相机反馈信号处理流程
2.2.2 多相机同步曝光反馈信号的实现
捕捉多相机的反馈信号采用的是单片机的PCA(可编程计数器阵列)捕捉/比较模块,其中每个模块都可被配置为独立工作,模块有6种工作方式:边沿触发捕捉、软件定时器、高速输出、频率输出、8位脉宽调制器和16位脉宽调制器。
新型相机同步曝光控制模块采用的是边沿触发捕捉方式,实现的是对信号的负沿进行捕捉,当电平变化时(即单片机检测到相机曝光的反馈信号),PCA立即进入中断进行捕捉并将捕捉到的多路反馈信号反映到反馈信号标志(CAM_MARK),单片机通过反馈信号标志的状态来判断相机的工作情况并自动进行补拍操作。
3 GPS时间校正的处理与实现
相机同步曝光模块接收GPS时间接收机的2部分信号(GPS时间信息和GPS时间脉冲),GPS时间信息接入单片机时间接收模块的串口部分,当时间信息到来时通过串口中断提取时间信息。GPS时间脉冲接入单片机时间接收模块的外部中断部分,当时间脉冲到来时单片机立即进入外部中断服务程序中,此时判断时间信息标志(TIME_FLAG),如果为真,则表示实时时间相差1s(设置实时时间和GPS时间信息时差1s),补偿后结束循环。如果时间信息标志为假,则返回并等待下一次时间信息。具体流程如图4所示。
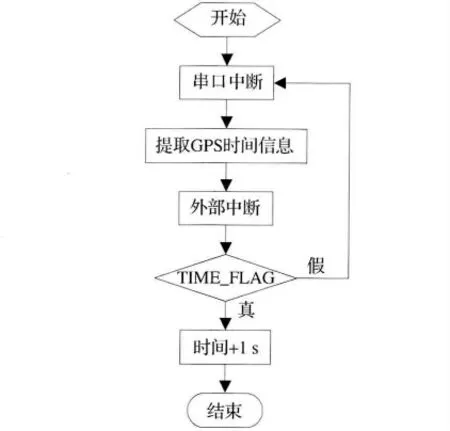
图4 GPS时间校正流程
4 实测数据分析
4.1 相机同步控制模块的同步效果比较
设定新型相机同步曝光控制模块补拍次数最大值为4,通过229次曝光实验进行数据分析。纠正前,3ms(设定3ms为相机同步的时差临界点)以内的曝光次数211次,约占总曝光次数的92.14%,超过3ms的曝光次数为18次,约占总曝光次数的7.86%;纠正后,3ms以内的曝光次数为226次,约占总曝光次数的98.69%,超过3ms的曝光次数是3次,约占总曝光次数的1.31%。由此可以看出带补拍功能的新型相机同步曝光控制模块比普通的多相机同步曝光控制模块的同步效果明显提高,增加了曝光控制模块的稳定性。具体相机曝光同步效果如表1所示。
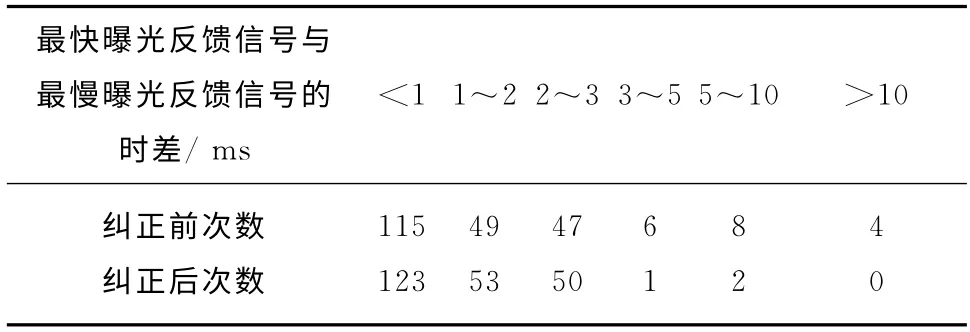
表1 相机曝光同步效果纠正前后的对比
4.2 相机同步曝光控制模块的时间精度比较
实验记录240s内设定的4个点时的时间精度比较。GPS校正前,模块的时间采用的是RTC的时间,由表2可以看出,随着工作时间的增加,模块与GPS的时差越来越大,精度相对比较差。利用GPS进行时间校正,设定1s校正一次,模块与GPS的时差相对稳定,不会随着工作时间的增加而不断增加,提高了模块的时间精度。具体比较如表2所示。
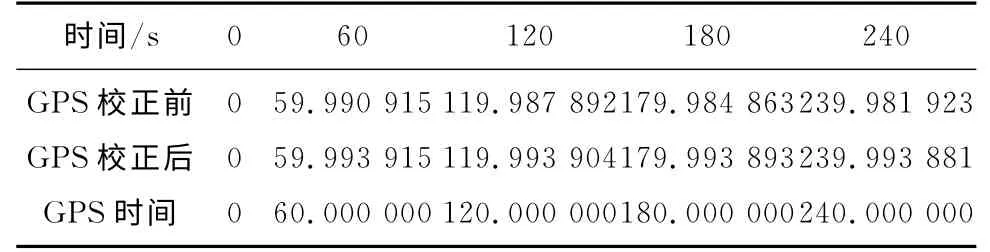
表2 同步曝光控制模块通过GPS校正前后时间精度的比较
5 结束语
本文研究的是新型相机同步曝光控制模块,重点介绍了关于相机反馈信号的处理过程和GPS时间纠正的原理。通过采用高性能的单片机对相机反馈信号的处理,进一步完善相机同步曝光控制模块对于漏拍、延迟拍摄这一问题进行解决,并且增加了GPS时间校正功能,满足了相机同步曝光控制模块拍照的稳定性和时间同步的精确性,具有很好的使用及推广价值。
[1]卢秀山,郑文华,郑作亚,等.室内定轨移动摄影测量系统[P].中国专利,CN101408534.2009-04-15.
[2]彭晓东,林宗坚.无人飞艇低空航测系统[J].测绘科学,2009,34(4):11-14.
[3]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997:143-146.
[4]王冬,卢秀山,刘凤英,等.自稳定双拼相机低空无人飞艇航测系统[J].遥感应用,2011(4):96-99.
[5]林宗坚.UAV低空航测技术研究[J].测绘科学,2011,36(1):5-9.
[6]林宗坚,苏国中,支晓栋.无人机双拼相机低空航测系统[J].地理空间信息,2010,8(4):1-4.
[7]李国玉,石波,吴玮,等.室内定规移动摄影测量控制系统设计与实现[J].测绘科学,2011,36(3):197-198.
[8]Wei G Q,Ma S D.Complete Two-plane Camera Calibration and Experimental Comparisons[C].In:Proc.ICCV’93:439-446.
[9]Hartley B.Self-calibration of Stationary Cameras[J].International Journal of Computer Vision,1997,22(1):5-23.
[10]Zhang Z Y.A Flexible New Technique for Camera Calibration[J].IEEE Trans.on Pattern Analysis and Machine Intelligence,2000,22(11):1330-133.
猜你喜欢
智能建筑电气技术(2022年2期)2022-02-06
商用汽车(2021年4期)2021-10-13
数学物理学报(2020年6期)2021-01-14
国学(2020年1期)2020-06-29
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
中学生数理化·中考版(2017年12期)2017-04-18
