
激光对成像制导系统的干扰*
2013-12-10 06:40刘延武吕俊伟
弹箭与制导学报 2013年5期
刘延武,李 楠,吕俊伟
(1山东工商学院信息与电子工程学院,山东烟台 264005;2山东省高校智能信息处理重点实验室,山东烟台 264005;3海军航空兵学院,辽宁葫芦岛 125001;4海军航空工程学院,山东烟台 264001)
0 引言
在当前新军事变革中,信息作战成为战争主导。成像制导武器作为信息作战中的典型武器,利用成像探测器获取目标信息,从而实现对武器的制导,由于其命中精度高、杀伤效果好,在信息作战中得到了重点发展。成像探测器主要有可见光CCD(charge coupled device)和红外 CCD。随着CCD器件在武器制导、卫星侦察、微光夜视等军事领域的广泛运用,深入研究对CCD的破坏则成为了信息作战的焦点,激光对成像探测器的辐照会引起探测器性能的下降甚至失效。
以往对激光干扰探测器的研究,主要集中在对CCD单个器件的破坏效应及饱和干扰上[1-6],而对成像制导系统的激光干扰没有展开,文中以可见光CCD成像探测器为研究对象,采用0.632μm连续He-Ne激光辐照可见光CCD成像探测器,开展视场内和视场外激光辐照实验,结合CCD成像制导系统的激光干扰前后命中概率变化研究,重点分析激光干扰对CCD成像制导系统的干扰效果,为激光武器的发展提供理论支撑。
1 激光干扰实验
1.1 CCD视场内干扰
实验采用的 CCD探测器是 VC-210B型0.85cm靶面黑白摄像机,像素500×582,感光面积4.9mm×3.7mm,灵敏度 0.05lx,光学镜头视场 52 °×44 °,镜头焦距3.6mm。激光器采用25mW的 He-Ne连续激光器,出光孔径4mm,激光波长0.632μm。视场内激光干扰CCD实验装置如图1。
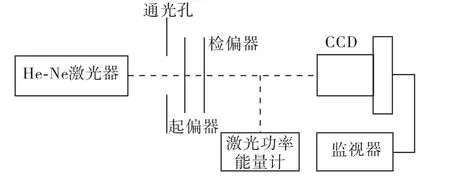
图1 CCD视场内激光干扰装置
调整激光束同CCD探测器光轴对准,激光器出光孔到CCD距离1.6m。将激光衰减到CCD线性工作区,逐渐减小衰减到CCD处于临界饱和状态。当到达CCD靶面激光功率密度为6.2×10-7W/cm2,探测器工作在线性区;减小衰减到CCD进入临界饱和状态,激光功率密度为9.8×10-7W/cm2;继续减小衰减到CCD进入饱和状态,激光功率密度为2.8W/cm2。图2是激光干扰能量不同时CCD视场内干扰效果。

图2 CCD视场内激光干扰效果
图2左侧是CCD工作在线性区时的成像图,中间是进入临界饱和状态时的成像图,右侧是进入饱和状态时的成像图。观察图2发现,当CCD进入饱和状态,出现了光饱和串音现象。这是因为照射到CCD光敏区局部的激光强度达到一定程度时,光照区域饱和,未照射区域先是沿着电荷传输方向出现亮线,光强增加,则亮线加宽,最终整个光敏区饱和。CCD光敏元是并行的,但其转移传输元是串行的,各元间以沟阻隔开,共基底电极。在1ps的极短时间内,大量光生载流子向邻近势阱溢流,形成串音。串音与CCD器件的结构尺寸、势阱深度、栅极电压有关。光饱和串音现象不会对CCD器件造成损伤,但会严重干扰其正常工作,使其难以成像和读取图像信号。
1.2 CCD视场外干扰
激光视场外干扰CCD的实验装置如同3所示。

图3 CCD视场外激光干扰装置
将激光器、光阑和滤光片安装在光学导轨上,CCD探测器固定在自由转动液压转台上,便于测量不同视场角激光对CCD的干扰情况。实验过程中,调整CCD同激光器的角度从5°~28°逐渐增大,随着入射激光功率和照射时间的增加,CCD被干扰的面积逐渐增大,随着激光束同CCD光轴夹角增大,干扰能力逐渐减弱。图4是激光束与CCD探测器光轴的夹角为28°时的干扰图像,此时激光束已超出CCD的视场,但仍可干扰探测器成像。
1.3 成像跟踪系统干扰
实际中激光干扰成像制导系统时,由于难以对准成像导引头,往往是视场外干扰,因此研究激光对成像制导系统能否实现视场外干扰,对军事应用有较大价值。利用CCD成像制导系统对坦克模型进行成像,调整转台改变激光束到CCD制导系统光轴入射角。图5是激光干扰前的原始图像和激光视场外干扰后的图像。

图4 CCD视场外激光干扰效果

图5 成像跟踪系统干扰前后成像图
从图5可见激光视场外干扰后,成像跟踪系统会受到严重影响,使得目标搜索、探测、识别十分困难,进而影响成像制导武器的作战效能发挥。
受到激光干扰后,成像跟踪系统变得模糊不清,影响制导指令的运行,图6和图7分别是受激光干扰后,导弹俯仰制导误差随时间变化和导弹偏航制导误差随时间变化曲线。横坐标为导弹飞行时间,激光干扰后,偏航制导误差角和俯仰制导误差角均出现震荡。通过观察发现激光干扰对偏航制导误差角的影响要远大于对俯仰制导误差角的影响。

图6 俯仰制导误差变化曲线
1.4 激光干扰能量计

图7 偏航制导误差曲线
假设距离激光发射点 R处,由衍射引起的垂直于导弹成像探测器整流罩表面的光束扩散半径为:

式中θ为光束发散角,θ受到光束衍射发散角θy、大气抖动引起的扩展角θt、激光光源抖动θd的影响。

式中:λ为激光波长;D0为激光发射望远镜孔径;β为光束质量因子。光束质量因子一般取1.5~3,这里取β =2,大气抖动引起的扩展角θt取为1×10-5rad,激光光源抖动与激光发射瞄准设备有关,这里假设θd=θy/2,取D0=50cm,R=5km时,导弹导引头成像探测器表面激光光斑半径d≈54cm。
假设发射的激光波长为 λ,激光器输出能量为P0,激光器同导弹导引头距离为R,瞄准跟踪系统的精度为δ,大气透过率为τ1,导弹光学镜头直径为D,整流罩为3mm厚的氟化镁,整流罩透过率为τ2,光学系统的光学效率为τ3,导弹光敏元件直径为 Φ,导弹接收到的能量密度为pe,则pe计算如下:

式中0.84是分布在爱里斑第一暗环内的光能百分比,由上式可得:

利用式(5)就能计算激光干扰成像制导导弹所需的激光能量,首先确定激光波长λ,计算激光在大气中的传输衰减,得到τ1;其次计算不同传输距离时,激光到达导弹探测器表面的相应光束扩散半径d;再根据所要干扰的导弹光学系统,确定 D、τ2、τ3的值;然后确定光电探测器的类型、干扰或损伤阈值pe及光敏元件直径Φ的值;最后确定激光跟踪瞄准系统的瞄准精度δ,并与前述各参数代入式(5)进行发射能量计算。
利用激光干扰成像制导导弹,攻击时激光发射处距离导弹成像探测器的距离R在1~10km内取值,计算出不同攻击距离时干扰导弹成像导引头所需发射的激光能量变化关系如图8所示。
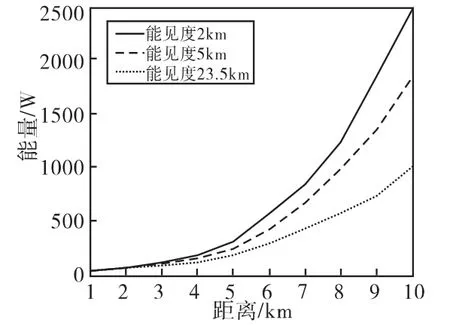
图8发射激光能量与干扰距离关系
从图8可见,在能见度为2km时,随着干扰距离的增加,实现成像导引头饱和干扰所需激光能量呈现非线性增加;随着能见度减小,所需发射激光能量急剧增加。当R=3km时,所需激光能量约为125W;当R=5km时,所需激光能量约为235W;当R=7km时,所需激光能量约为855W;当R=10km时,所需激光能量约为2500W。
2 干扰效能评估方法
视场内、外激光辐照CCD成像探测器,均能实现对成像制导系统的干扰。实战中,激光对准CCD探测器较为困难,但只要发射功率高,视场外干扰同样能有效干扰CCD成像制导系统,降低其作战效能。
设无激光干扰时成像制导武器制导精度为δ0,激光干扰后成像制导武器脱靶量为Δr,则按下述标准判定干扰是否有效:1)当Δr≤3δ0时,干扰无效;2)当Δr>3δ0时,干扰有效。干扰成功率η为:

其中:ne是干扰有效次数,n是干扰总次数。
另一个用的最多的干扰效能评估参数是命中概率,以命中概率评估成像制导武器受激光干扰前后的变化最为直观。弹着点散布规律为:

式中:x、y表示落点坐标,σx、σy分别为 x、y的标准差,即制导误差中的随机误差大小。
设P表示单发成像制导武器命中概率,计算如下:

式中a、b为目标等效长方形的长和宽。
干扰效能评估采用以下方式:1)单发命中概率下降值作为评估干扰效能参数,ΔP=P-P';2)单发命中概率相对下降值作为评估参数,β=(PP')/P,P'表示干扰后的命中概率。
3 干扰前后命中概率计算
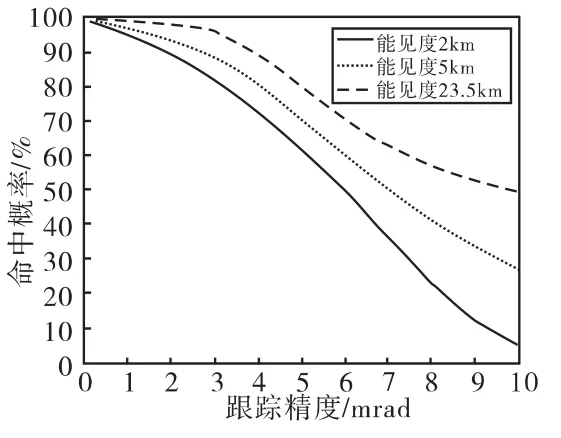
图9 跟踪精度对导弹命中概率影响

图10 激光干扰距离不同时命中概率
先进行激光干扰前成像制导武器命中概率计算,设成像制导导弹正常飞行,与攻击目标相距350m时进入盲区,随后保持跟踪状态直线飞行,制导导弹命中概率同跟踪精度的关系如图9所示。图9表示能见度不同时,成像制导导引头跟踪精度的大小对导弹命中概率的影响。再进行激光干扰后成像制导武器命中概率计算,假设成像制导导弹距离攻击目标一定程度时,受到激光干扰,从而引起导引头致盲,制导导弹按照干扰前的导引指令攻击目标,由于制导误差较大,命中概率迅速下降,激光发射距离不同时成像制导导弹命中概率如图10所示。能见度为23.5km时,在激光干扰前成像制导导弹命中概率为99.7%,在3km处实施激光干扰后,成像制导导弹命中概率降为30.8%,命中概率下降了68.9%,这说明干扰效果较好。
4 结束语
以可见光 CCD成像探测器为研究对象,采用0.632μm连续He-Ne激光器辐照CCD成像探测器,开展视场内和视场外激光干扰实验,结合成像制导系统的激光干扰实验研究制导导弹命中概率的变化,重点分析激光干扰对成像制导系统的干扰效能,在3km处激光干扰后成像制导导弹命中概率降为30.8%,干扰效果较好,这为发展激光武器干扰成像制导系统提供了理论支撑。
[1]杨希伟,童忠诚,汪亚夫,等.激光干扰光电成像导引头的建模与仿真[J].红外与激光工程,2011,40(7):1243-1248.
[2]张方芳,阮江洋,王晓蕊.激光干扰下红外成像系统性能预测研究[J].电子科技,2011,24(9):149-153.
[3]刘延武,王红星.视场内激光干扰CCD探测器的实验研究[J].传感器与微系统,2010,29(10):34-36.
[4]张景阳,王海晏,雷威.脉冲激光干扰面阵CCD实验的模糊评估[J].激光与红外,2011,41(4):421-425.
[5]邵立,汪亚夫,宋伟.连续激光干扰 CCD成像研究[J].激光杂志,2012,33(2):38-40.
[6]徐银,孙晓泉,邵立.激光干扰对CCD成像系统目标检测性能的影响[J].红外与激光工程,2012,41(4):989-993.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
空军工程大学学报(2020年1期)2020-06-12
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
