一种稳健估计的无人机机载相机标定法
2013-12-11 07:27何海清黄声享
测绘通报 2013年2期
何海清,黄声享
(武汉大学测绘学院,湖北 武汉430079)
一、引 言
随着测绘科技、高分辨率传感器、无人机驾驶飞行平台等技术的迅猛发展,应用于航测的无人机技术日臻成熟,无人机航测可做到快速响应,并能够直观地、实时动态地快速获取反映地表状况的多源、多尺度、高分辨率、低成本遥感影像数据,为资源快速调查、灾害防治等应用提供应急保障。
无人机航测现阶段搭载的传感器一般为高分辨率数码相机,而其标定是进行摄影测量的重要组成部分,用于精确建立空间物体三维位置与图像对应点之间的几何模型。由于无人机航测存在飞行平台姿态不稳定、起飞降落可能抖动剧烈等问题,同时为了满足不同摄影环境还需要变焦或更换镜头,因此无人机所搭载的高分辨率数码相机应频繁地标定内部参数。目前,国内外学者在摄影机标定领域作了广泛而深入的研究,具有代表性的标定方法有Abdal Aziz和Karara于20世纪70年代初提出的线性变换相机标定方法[1];Tsai于20世纪80年代中期提出的基于RAC的相机标定方法[2];张正友提出的利用旋转矩阵的正交性与非线性最优化摄像机平面标定法[3];谭晓军等提出的通过双目匹配点标定立体摄像机[4];詹总谦等提出的基于LCD平面格网和有限元内插模型的相机标定法[5];高智等提出的通过编码检校场实现双目视觉系统的自动标定法[6]等相机标定方法。目前,相机标定原理较为成熟,然而,由于标定内参数计算过程中采用等权的最小二乘法估计,因此其抵抗粗差的能力差[7],若标定所使用特征点中存在精度较低或误差过大的坐标值,势必会影响标定结果的精度。
本文顾及相机自动标定提取特征点可能存在的定位粗差,提出利用稳健估计平差法参与相机标定的方法,以消除粗差对内参数计算产生的影响。该方法根据相机针孔成像原理,利用线性和非线性的Tsai两步标定法,以及从Robust原理导出的选择权迭代法,逐步消弱角点检测带来的粗差对内参数估计的影响,以获得精度更高的标定结果。
二、相机成像模型
相机成像实质上是三维空间实体映射到二维空间的过程,本研究相机成像模型选用针孔模型来求解相机内参数。针孔相机模型是通过透视变换原理,经坐标系两次转换,即由三维实体世界坐标系转换摄影坐标系再转到图像坐标系,从而实现将三维空间中的点投影到图像坐标系中的点,其空间关系如图1所示。
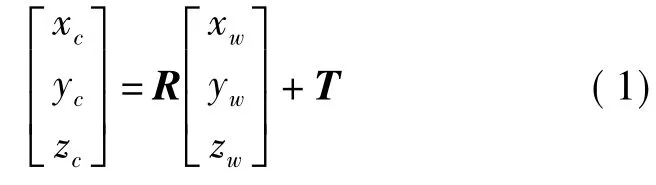
世界坐标系与摄影坐标系的空间转换关系为
根据共线方程,摄影坐标系与图像坐标系的关系为
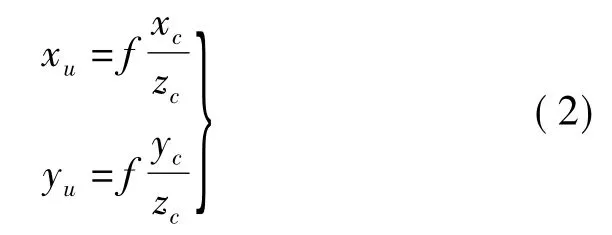
式中,(xc,yc,zc)为摄影坐标系坐标;(xw,yw,zw)为世界坐标系坐标;(xu,yu)为理想图像坐标系坐标;R为旋转矩阵;T为平移矩阵;f为焦距。
式(1)、式(2)表示的是无镜头畸变的理想相机成像模型,若考虑镜头畸变,则需要对其进行修正。相机畸变主要包括径向畸变和切向畸变,如图2(a)所示,其产生的畸变效果如图2(b)所示。相机畸变与图像坐标数学模型为
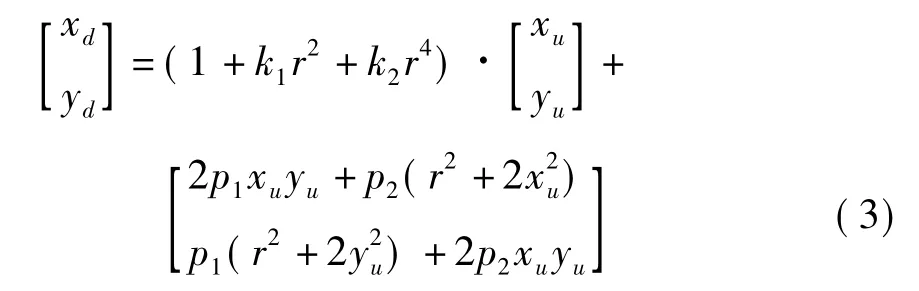
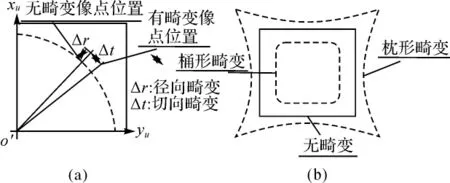
图2 相机镜头畸变与理想图像成像关系
三、稳健抗差估计的相机标定法
由于无人机航测飞行高度一般为300~1000 m,需将相机根据超焦点距离给定焦距f,以使物镜向无穷远目标对光时,其构像都很清晰。超焦点距离H和焦距 f的关系[8]为

式中,k为光圈号数;ε为模糊圆大小。无人机在航测前需将焦距固定,摄影景深公式[8]为

由式(6)可知,当物距a和焦距f固定时,光圈号数越大,景深也越大。在相机室内标定时,固定镜头以确保焦距不变,通过增大光圈号数和增加曝光时间以获得LCD液晶显示屏棋盘标定模板清晰影像。然而,由于存在不同拍摄角度环境光不同、曝光时间长手抖动造成影像模糊等问题,会使得获取的标定模板影像质量降低,不可避免地产生误差。同时,Harris算法提取的角点可能存在偏差,也会对标定结果产生影响。
本文研究无人机机载相机标定基于LCD定标模板,因此可从不同角度拍摄若干张模板图像,并利用Harris算法检测出图像中角点。假定其世界坐标系中Zw=0,并假设相机在无畸变情况下,利用径向一致约束来求解旋转矩阵、平移矩阵、比例因子等相机外参数,然后把这些参数作为初值代入有畸变的相机成像模型公式,引入稳健抗差估计算法,从验后方差中迭代选权求解其他参数,逐步消弱Harris算法角点检测带来的粗差对内参数估计的影响。
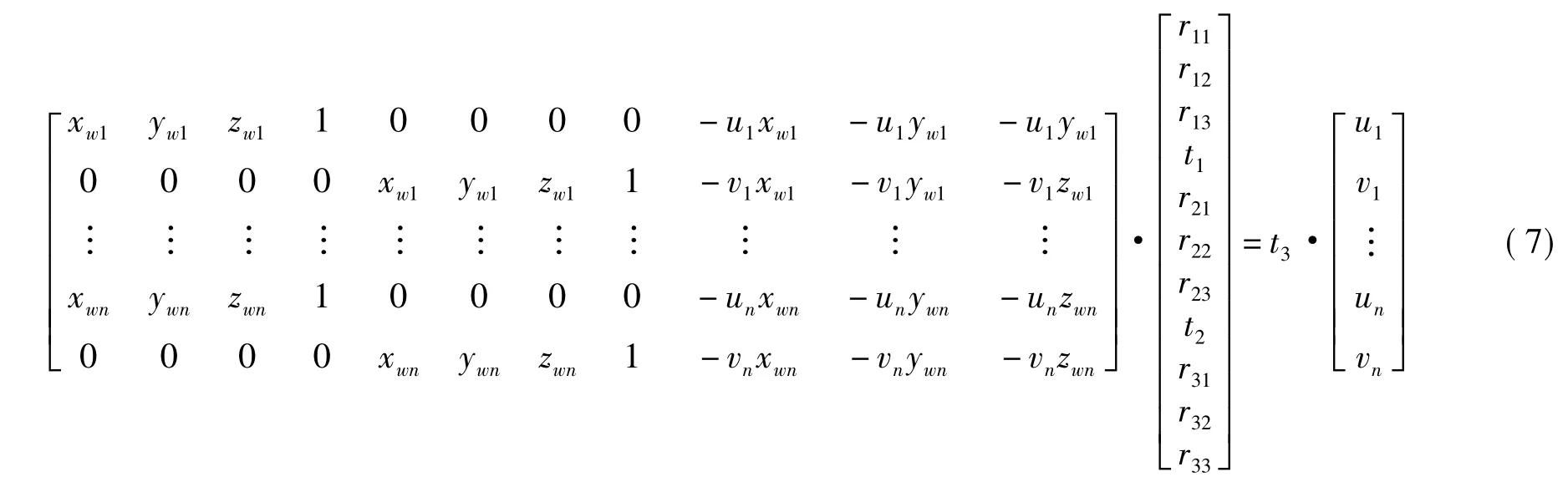
1)不考虑相机畸变时,对于图像中角点,利用线性式(1)、式(2),根据最小二乘法优化求解旋转矩阵R、平移矩阵T。公式如下

2)考虑相机畸变时,将1)中得到的旋转矩阵R、平移矩阵T作为初值,联立式(1)、式(3)、式(4),求解公式变为非线性公式,将其一次泰勒展开并线性化得
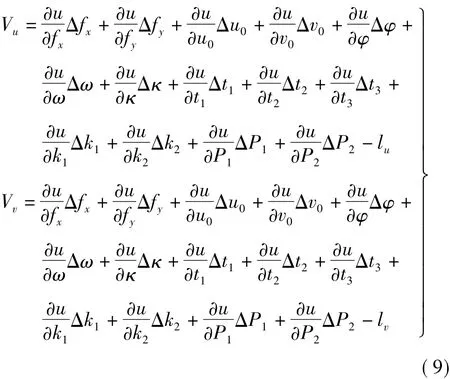
式中,fx=f/d x;fy=f/d y。可将式(9)整理为

式中,权P初始值为单位权,把解算得到的 X=X0+x作为初值X0进行迭代运算,直至x收敛。从Robust原理出发的选择权迭代法在迭代开始时不要轻易舍弃残差大的观测值,而在迭代结束时严格剔除粗差甚至是较小的粗差,以实现估值的稳健化。其权函数为[9]

通过验后得到的新权,返回式(12)中进行迭代运算,从而消弱粗差的影响,以得到更为精确的内参数。
四、试验结果及分析
本文方法采用9×9棋盘格LCD(纯平液晶显示器)平面模板进行试验研究,如图3所示。通过VC++编程实现本文方法,并以无人机机载相机Cannon EOS5D MarkⅡ进行标定试验,其图像分辨率为5616像素×3744像素。像片拍摄方式如图4所示,中心为LCD平面模板,黑点为拍摄点,分别从顺时针和逆时针两个方向拍摄,棋盘尽量占满像幅,以获得不同角度标定模板的图像共78张像片。本次试验流程如图5所示,首先提取试验像片角点,通过等权最小二乘法优化估计,得到相机内参数初值,并根据Robust原理的选择权迭代法,逐步剔除角点粗差,得到精确的相机标定参数。
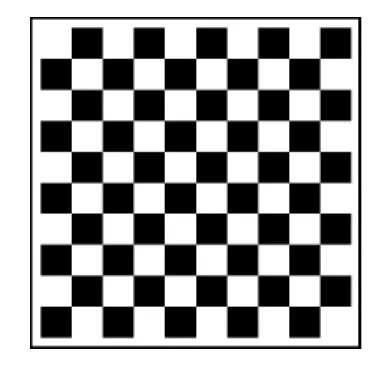
图3 LCD平面标定模板
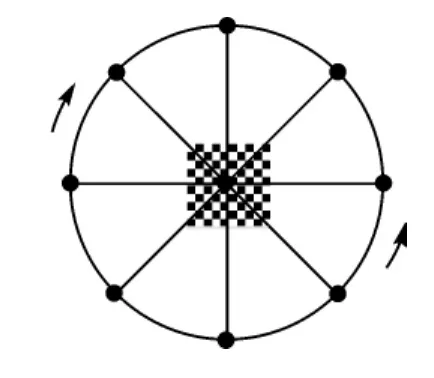
图4 标定模板拍摄方式
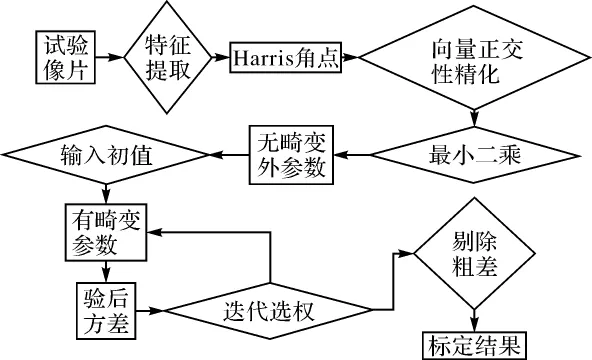
图5 实验流程图
通过等权最小二乘法的相机标定参数优化估计,得到标定参数初值,进行反投影得到的角点坐标残差如图6所示,显然存在粗差,如不剔除,势必对标定参数精度产生影响。

图6 等权最小二乘法参数标定估计
该CCD相机在标准检校场得出其主要参数,焦距 f为35.4944 mm,像元大小为6.4 um,像主点x0、y0分别为0.2 202 mm、0.028 7 mm。本文方法和等权最小二乘法参与解算内参数见表1,焦距为37.541 mm,像主点 x0、y0分别为0.456 5 mm、0.156 2 mm,与标准检校场标定结果相差较大,相机CCD各参数中误差较大;经本文方法利用稳健估计剔除粗差得到的标定结果见表1,像素非常接近正方形,纵横比通过fx/fy计算为1.000 3,焦距为35.521 9 mm,像主点 x0、y0分别为0.212 5 mm、0.031 46 mm,角点畸变偏移如图7所示。与标准检校场得出的结果相比,焦距相差0.027 5 mm,像主点 x0、y0相差分别为0.007 7 mm、0.002 76 mm,该相机CCD标定参数焦距中误差低于0.2像素,像主点低于0.1像素,可满足无人机航测精度的要求。
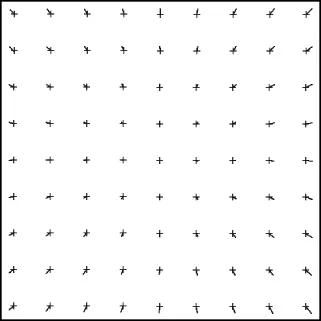
图7 角点畸变偏移量平面图

表1 试验图像标定结果 像素
为了检验标定结果的实际精度,根据本文方法得到的相机内方位元素、畸变参数及图像旋转平移等外方位元素,对试验中每张像片进行了反投影,并将反投影求得的各个角点图像坐标与自动检测得到的角点图像坐标比较分析,求得二者的中误差为0.093 像素。
五、结束语
为了满足无人机机载相机变焦或更换镜头,以及不同环境航测需要,实用、有效、快捷地标定相机内方位元素和畸变参数具有重要意义。本文利用LCD液晶平面模板自动提取角点,利用稳健估计平差法参与相机标定,从Robust原理迭代选择权,逐步消弱角点定位粗差对内参数估计的影响。通过对无人机机载相机Cannon EOS5D MarkⅡ一组图像进行试验,并与等权最小二乘法参数估计和标准检校场结果进行对比。结果表明,该方法比等权最小二乘法参与相机标定精度更高,可得到更为稳健的标定结果,能在一定程度上满足无人机机载相机标定参数需要。
[1]HEIKKILA J,SILVEN O.A Four-step Camera Calibration Procedure with Implicit Image Correction[C]∥IEEE Comput Soc Press.San Juan:[s.n.],1997:1106-1112.
[2]TSAI R Y.A Versatile Camera Calibration Technique for High Accuracy 3D Machine Vision Metrology Using Offthe-Shelf TV Cameras and Lenses[J].IEEE J Robotics and Automation,1987,3(4):323-344.
[3]ZHANG Z.A Flexible New Technique for Camera Calibration[J].IEEE Trans Pattern Analysis and Machine Intelligence,2002,22(11):1330-1334.
[4]谭晓军,余志,李军.一种改进的立体摄像机标定方法[J].测绘学报,2006,35(2):138-142.
[5]詹总谦,张祖勋,张剑清.基于LCD平面格网和有限元内插模型的相机标定[J].武汉大学学报:信息科学版,2007,32(5):394-397.
[6]高智,仲思东,刘勇.通过编码检校场实现双目视觉系统的自动标定[J].武汉大学学报:信息科学版,2007,32(10):936-939.
[7]黄维彬.近代平差理论及其应用[M].北京:解放军出版社,1990.
[8]乔瑞亭,孙和利,李欣.摄影与空中摄影学[M].武汉:武汉大学出版社,2008.
[9]李德仁,袁修孝.误差处理与可靠性理论[M].武汉:武汉大学出版社,2002.
猜你喜欢
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
电子技术与软件工程(2018年10期)2018-07-16
摄影之友(影像视觉)(2017年10期)2017-11-07
电子科技(2016年12期)2016-12-26
系统工程与电子技术(2016年4期)2016-08-24
物理实验(2015年9期)2015-02-28
癌变·畸变·突变(2014年2期)2014-03-01
电子设计工程(2014年17期)2014-02-27