一种应用于交通环境中的运动车辆跟踪方法
2013-12-14 01:36潘小雷
重庆邮电大学学报(自然科学版) 2013年3期
甘 玲,潘小雷
(重庆邮电大学计算机科学与技术学院,重庆400065)
0 前言
车辆实时跟踪是车辆行为分析和识别的前提,是智能交通系统中的核心内容和关键技术[1-2],对解决交通问题具有重大意义。
运动车辆的跟踪方法主要有四类:基于三维模型;基于统计模型;基于区域模型和基于特征的车辆跟踪方法[3-4]。基于3D模型的车辆跟踪方法在车辆行为复杂、不完全遮挡、明显交通阻塞的情况下也能进行正确跟踪,但现实中要获得所有运动车辆的精确几何模型是非常困难的;然而,基于3D模型的车辆跟踪方法往往需要大量的运算时间,很难实现实时的车辆跟踪,这就限制了该方法的使用;基于统计模型的车辆跟踪方法对解决遮挡和阴影问题效果好,但是当车辆灰度与背景过于接近时,该方法跟踪效果欠佳;基于特征的车辆跟踪方法能很好地解决车辆行为导致的车辆变型以及车辆遮挡问题,但是如何确定它的唯一特征集是非常困难的;基于区域模型的车辆跟踪方法实现步骤简单、运算速度快、实时性较高、跟踪稳定,可以很方便地得到车辆的运动信息,如速度、方向等,结合推理模型可解决车辆遮挡等车辆跟踪问题,适合在复杂交通场景下快速而准确地对车辆进行跟踪。
基于卡尔曼预测模型的区域匹配运动车辆跟踪方法是区域模型跟踪方法的一种应用最广泛的跟踪方法,该方法在很多方面都具有优势,然而,该方法在车辆位置的预测机制上有待进一步的改进。本文从应用的角度出发,结合运动车辆自身的特点,提出了根据相邻两帧车辆的面积重叠率进行车辆预测的机制,最后,根据提取出的车辆特征进行匹配,从而完成车辆的跟踪。
1 基于卡尔曼预测模型区域匹配运动车辆跟踪方法
该方法提取运动车辆外接矩形框、质心等参数,为每辆车建立一个预测模型,利用卡尔曼滤波对模型进行预测和更新,实现对运动车辆的精确定位和跟踪。
1.1 卡尔曼滤波
卡尔曼(Kalman)滤波是由 R.E.Kalman于1960年在其发表的一篇论文中首次提出。卡尔曼滤波是一种递推线性最小方差估计[5-6],是目标跟踪所广泛采用的一种跟踪方法。假定离散时间过程的状态方程和观测方程为
(1)-(2)式中:t表示时间;Xt表示t时刻的状态变量;ωt和νt表示t时刻的白噪音;A表示状态之间的增益矩阵;Yt是为t时刻的系统状态观测向量;Ct为迭代时状态变量与观测变量之间的增益矩阵的取值。则卡尔曼滤波是通过动态的状态方程以及观测方程来描述系统的。卡尔曼滤波公式可以分为2个部分:预测和修正。其中,预测部分负责运用当前的状态和误差协方差来估计下一时刻的状态,得到先验估计(预测);修正部分负责反馈,同时考虑新的实际观测值与先验估计值,从而获得后验估计(修正)[7]。在每次完成预测和修正以后,由后验估计值预测下一时刻的先验估计,重复以上步骤,这就是卡尔曼滤波器的递归工作原理[7]。
1.2 基于卡尔曼滤波的运动车辆预测模型
在卡尔曼预测模型中,主要分为预测部分和修正部分。预测部分是卡尔曼滤波根据前帧中得到的运动车辆区域的外接矩形框、质心位置、加速度、速度等的估计值,预测出当前帧中的相关参数,修正部分是利用当前帧观测值对相关参数进行修正。利用卡尔曼滤波模型进行运动车辆的跟踪时,在运动车辆跟丢后,可以直接用相关参数的预测值作为跟踪系统的输出值,直到该车辆被再次跟踪。
为每辆车建立卡尔曼预测模型[8],该模型随着交通图像帧数的增加不断的递推迭代以及模型更新,对车辆大小、位置进行实时预测,实现过程如图1所示。
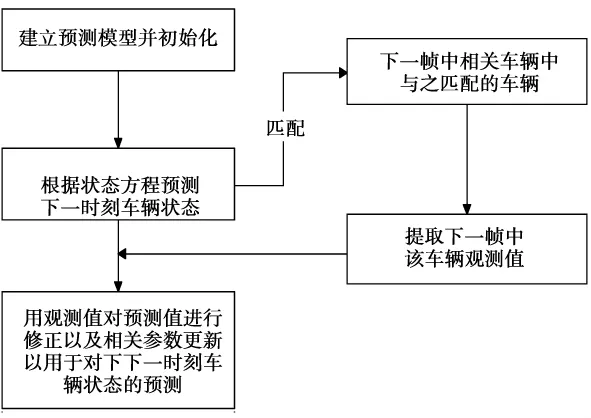
图1 卡尔曼预测模型实现最佳估计流程图Fig.1 Flow chart of Kalman prediction model that achieve the best estimation
1.3 车辆跟踪方法步骤
基于卡尔曼预测模型的区域匹配运动车辆跟踪方法步骤如下。
Step1车辆区域观测参数的提取。提取车辆链表中的一辆车的预测量,包括矩形框的提取,矩形框的长、宽,矩形的质心,面积等;
Step2初始化。在第一次使用卡尔曼滤波器时要对滤波器进初始化;
Step3预测。利用状态方程预测当前目标车辆的下一运动状态区域和误差协方差,得到先验估计;
Step4匹配。根据预测的目标区域进行搜索,并在该区域内寻找车辆目标的最佳匹配;
Step5修正。根据先验估计和真实观测值得到系统的最优输出。重复预测、匹配、修正过程,即可完成运动车辆的跟踪。
由于车辆具有区域性,比如长宽比例在一定的范围内、在相邻两帧,时间间隔很短,车辆发生的位移很小,这样前后两帧相同车辆的重叠面积较大,根据运动车辆的这些特征提出了一种改进的运动车辆跟踪方法。
2 改进的运动车辆跟踪方法
本文方法首先提取运动车辆的区域观测参数,然后,根据前后两帧提取出的运动车辆最小外接矩形框的面积重叠率对前帧中出现的运动车辆做出预测,最后,根据提取出的运动车辆特征进行匹配,从而完成运动车辆的跟踪。假设视频图像帧之间的时间间隔为t=0.025 s,该方法的主要步骤如下。
Step1提取视频图像序列第k(k=1)帧检测出的运动车辆的外接矩形框rectangle(i)(分别计算矩形框的长(height(i))、宽(width(i))、矩形框对应运动车辆质心坐标(质心坐标在X轴的坐标CX(i),在Y 轴上的坐标 CY(i)),其中,i为 1,2,3,…,n;其中,最小外接矩形框如图2所示,1,2,3表示车辆的标识;
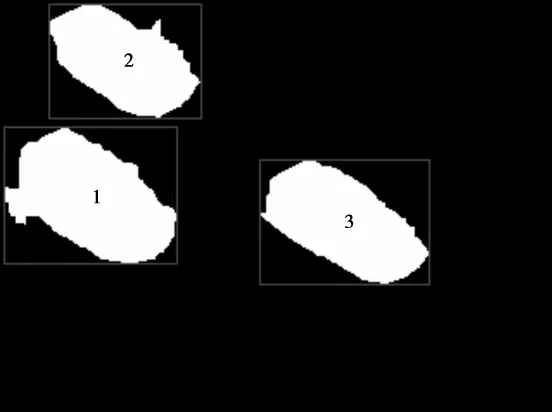
图2 最小外界矩形框的提取效果图Fig.2 Minimum external rectangle extraction renderings
Step2提取视频图像序列第k(k=2)帧检测出的运动车辆的最小外接矩形框rectangle(i)(分别计算矩形框的(height(i))、宽(width(i)))、矩形框对应运动车辆质心坐标(质心坐标在X轴的坐标CX(i),在 Y 轴上的坐标 CY(i))等,其中,i为1,2,3,…,n;
Step3第k(k=1)帧中提取的rectangle(i)分别与第k(k=2)帧提取的rectangle(i)的重叠面积为overlap(i)(重叠面积大于零),重叠面积从大到小,依次作为rectangle(i)矩形框对应车辆的最佳预测、次最佳预测等;
Step4计算第k(k=1)帧中该rectangle(i)矩形框的面积、长、宽、质心坐标以及第k(k=2)帧中经过预测与之匹配的矩形框的面积、长、宽、质心坐标,然后分别计算第k(k=1)帧中该rectangle(i)矩形框的质心与第k(k=2)帧中经过预测与之匹配的rectangle(i)质心的距离、矩形框面积之间的差、矩形框周长之间的差和运动车辆面积之间的差,若四者都小于相应的判决阈值,则认为与之对应的两辆车为同一辆车,否则该车辆驶出观测视野;
Step5判段第k帧中车辆是否都提取完,若都提取完,则执行Step6,否则,i自增1,执行Step1;
Step6判断当前帧中有没有与之匹配的剩余车辆,如果有,则认为这些车辆为新驶入观测视野的车辆,分别提取其相关特征数据,给其新的标识;
Step7 k增加1,重复上述步骤,从而完成运动车辆的跟踪。
3 实验结果及分析
采用交通部门提供的某个时段的交通序列图共1 000帧(每帧320×240像素),在操作系统为WIN7、CPU为i3、内存为2G的 PC机上,运用 matlab7.11.0 完成。
改进的区域匹配跟踪方法第249—256帧跟踪效果示意图依次如图3所示。
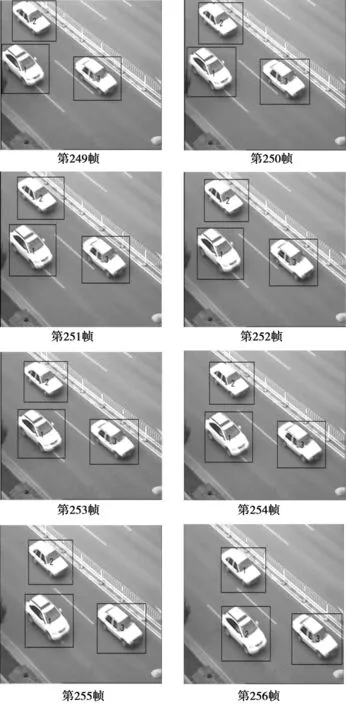
图3 改进的区域匹配跟踪方法跟踪效果示意图Fig.3 Schematic of tracking results of improved region matching tracking method
图3中的矩形框表示运动车辆的外接矩形框,数字1,2,3表示运动车辆的标识,标识相同的表示同一辆车,即为跟踪的结果,基于卡尔曼滤波的区域匹配跟踪方法跟踪效果图与图3类似,在此就不再赘述。
分别统计2种方法前80帧的时间,其时间消耗对比如表1所示。
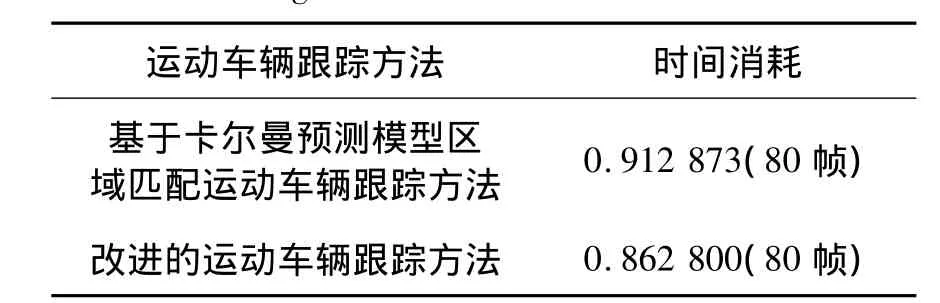
表1 2种运动车辆跟踪方法时间消耗比较Tab.1 Time efficiency comparison of two kinds of moving vehicle tracking method
从表1可以看出,在时间效率上,改进的运动车辆跟踪方法较原方法有一定的提高。随着帧数的逐渐增加,2种方法跟踪的时间都会有所增加,但是改进的方法较原方法提高的幅度基本是一致的。
运用上述2种方法进行运动车辆跟踪,其跟踪正确率如表2所示。
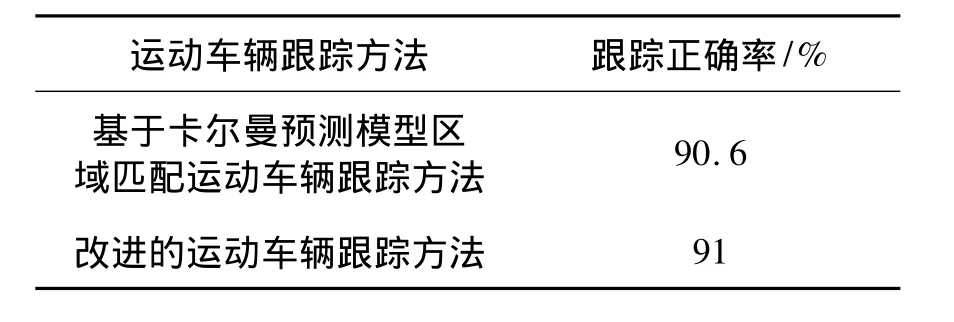
表2 2种运动车辆跟踪方法正确率比较Tab.2 Accuracy comparison of two kinds of moving vehicle tracking method
从表2可以看出,在跟踪正确率上,2种方法相差无几。
综上所述,由于改进的方法用提取出来的一个面积重叠率特征作为预测机制,而去掉了卡尔曼滤波预测部分。因此,其简化了跟踪过程,减少了计算复杂度,提高了时间效率,并且不影响其跟踪正确率。但是,在车辆灰度值与背景灰度值几乎一致时,以及在车辆相互遮挡比较严重而不能正确处理时,这时车辆会跟丢,甚至跟踪也会失效。由于面积重叠率只是在两帧之间进行的,一旦出现运动车辆跟丢的情况,就会彻底失去对该车辆的跟踪。
4 结束语
本文根据运动车辆自身具有区域性:长宽比例在一定的范围内、相邻两帧时间间隔很短,因此,发生的位移很小,这样前后两帧重叠的面积较大,根据车辆重叠面积率进行预测,之后进行特征匹配,从而完成运动车辆的跟踪,较之基于卡尔曼预测模型区域匹配运动车辆跟踪方法,跟踪过程较简单。仿真实验表明,改进的运动车辆跟踪方法在时间效率上有一定的提高。然而,该方法一旦运动车辆跟丢,后续过程将失去对该车辆的跟踪,这有待进一步的研究。
[1]European Commission.The Karen European ITS Framework Architecture[EB/OL].(2004-07-02)[2011-11-10].http://www.frame-online.net/.
[2]The Nat’l ITS Architecture Version 5.1.Dept.Transportation of the US[EB/OL].(2005-04-20)[2011-11-10].http://itsarch.iteris.com/itsarch/index.htm.
[3]张伟.基于视觉的运动车辆检测与跟踪[D].上海:上海交通大学,2007.ZHANG Wei.Moving vehicle detection and tracking based on the vision[D].Shanghai:Shanghai jiao tong university,2007.
[4]李红波,陈安荣.一种基于SIFT的遮挡目标跟踪算法[J].重庆邮电大学学报:自然科学版,2011,23(2):231-236.LI Hongbo,CHEN Anrong.A tracking algorithm based on SIFT[J].Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition,2011,23(2):231-236.
[5]KALMAN R E.A new approach to linear filtering and prediction problems[J].Transactions of ASME-Journal of Basis Engineering,2006,25(4):35-45.
[6]WELCH G,BISHOP G.An introduction to the Kalman filter[C]//In Proceedings of the ACM SIGGRAPH Conference,Los Angeles:ACM Press,2001.
[7]雷燕.基于视频的车辆检测研究[D].哈尔滨:哈尔滨工程大学,2008.LEI Yan.Vehicle detection research based on Video[D].HaErBin:Harbin Engineering University,2008.
[8]STAUFFER C,GRIMSON W E L.Learning patterns of activity using real-time tracking[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2000,22(8):747-757.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
中国惯性技术学报(2020年2期)2020-07-24
沈阳理工大学学报(2019年4期)2019-09-13
科学与技术(2019年3期)2019-03-05
今日农业(2017年4期)2017-12-22
工业设计(2016年4期)2016-05-04
焊接(2016年4期)2016-02-27
西北工业大学学报(2015年3期)2015-12-14
航天器工程(2014年5期)2014-03-11