滑模干扰观测器在低速光电跟踪系统中的应用
2013-12-19 08:58刘正华
北京航空航天大学学报 2013年6期
任 彦 刘正华 周 锐
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
光电跟踪系统是一种对跟踪精度要求非常高的测量设备,随着光电跟踪系统应用领域的扩大,其应用环境和使用工况日益复杂多变,因此,高性能的伺服控制显得尤为重要[1-2].保证在各种时变干扰抖动的情况下,使信标光束能够精确地瞄准目标已经成为定向能量武器、自由空间光通信和自适应光学领域应用的热门话题[3-4].
光电跟踪系统一般安装在飞机、舰艇或车辆等动基座上,影响伺服系统跟踪精度的扰动主要包括:①伺服系统中模型参数的变化及摩擦力矩的存在严重影响了光电跟踪系统的性能[5];②如何减小基座运动和机械振动引起的瞄准线指向稳定误差;③大气湍流引入的抖动,大气抖动是一种频谱范围很宽的宽带扰动[6].因此研究有效地控制方法去抑制干扰信号,提高跟踪精度,是光电跟踪设备需要解决的关键问题.
由于滑模技术对系统的不确定性及外界干扰具有很好地鲁棒性并且可以与自适应、模糊等技术相结合,因此基于滑模技术的观测器设计方法得到广泛的关注,但是大多数的滑模观测器都是对系统状态变量的观测与估计[7-9],文献[10]提出采用滑模干扰观测器估计系统干扰信号的方法,但该方法需要知道干扰的具体结构形式,在应用上有一定的局限性.本文将结合文献[11]中EID(Equivalent Input Disturbance)的概念,采用新型滑模干扰观测器和自适应加速度稳定控制器对系统干扰信号进行估计,利用系统中线性部分的已知信息对非线性干扰信号进行有效地估计.
1 系统建模
光电伺服系统是一种高精度的视轴稳定伺服控制系统,主要由直流力矩电机、功率放大器、编码器、平台框架以及安装在框架上的光学系统等组件组成.根据物理特性,其每一个自由度的动态机电模型可以简化为

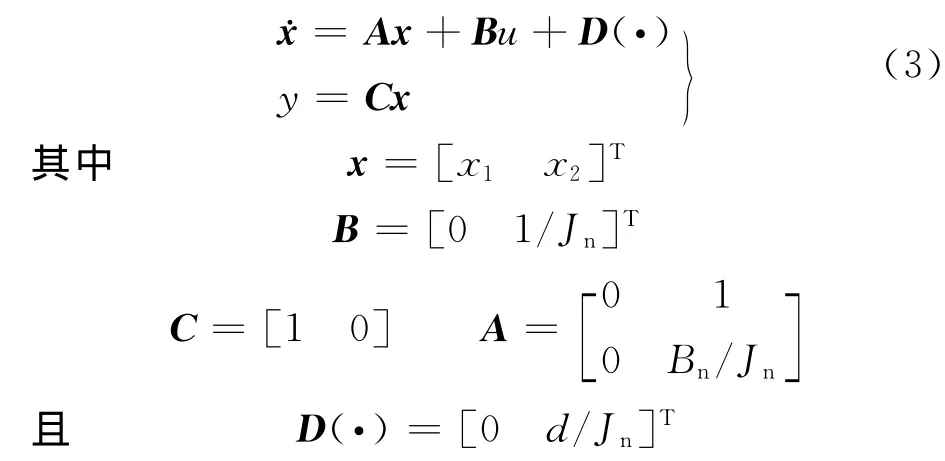
其中,Jo,Bo,θ和u分别定义为系统的转动惯量、粘性阻尼系数、角位置和控制变量;df为系统的外干扰,包括非线性摩擦;Δ(x,t)为系统未知的不可建模的非线性动态部分.将系统的外干扰、系统不可建模及模型参数不匹配部分用等效干扰d来表示,则式(1)可以表示为

其中,Jn,Bn分别为名义模型的转动惯量和阻尼系数.等效干扰为

如果d能够被有效地补偿,那么可以用名义模型来描述系统.
假设1 (A,C)可观,(A,B)可控.即存在适当维数的正定矩阵P和Q以及矩阵K满足如下等式:(A-BK)TP+P(A-BK)=-Q.
假设2 等效干扰d范数有界,即‖d‖≤dM.
2 滑模干扰观测器的设计
2.1 等效输入干扰
文献[11]定义了等效输入干扰de(t)的概念,令D(·)=Bde(t),系统变为

则等效输入干扰如图1所示.

图1 具有等效输入干扰的被控对象
文献[11]在估计EID的过程中,利用线性系统状态观测器来代替干扰观测器(DOB,Disturbance Observer)中被控对象名义模型的逆模型,避免了其逆模型不存在或存在不稳定极点的问题.
2.2 EID的估计
文献[11]是基于系统状态观测器设计的等效输入干扰估计算法,在系统低频域内可以很好地实现等效输入干扰补偿,提高系统的性能,但当系统受到突然变化的外力、摩擦等具有快速变化性质的干扰力作用时,应用其只能补偿这些快速干扰的低频分量,无法补偿掉这些干扰的高频分量.本文根据滑模控制具有快速切换特性的特点,结合传统的状态观测器,搭建了一种新的滑模干扰观测器,对系统的各种干扰进行估计和补偿,其系统的控制结构如图2所示.
设计系统观测器的形式如下:

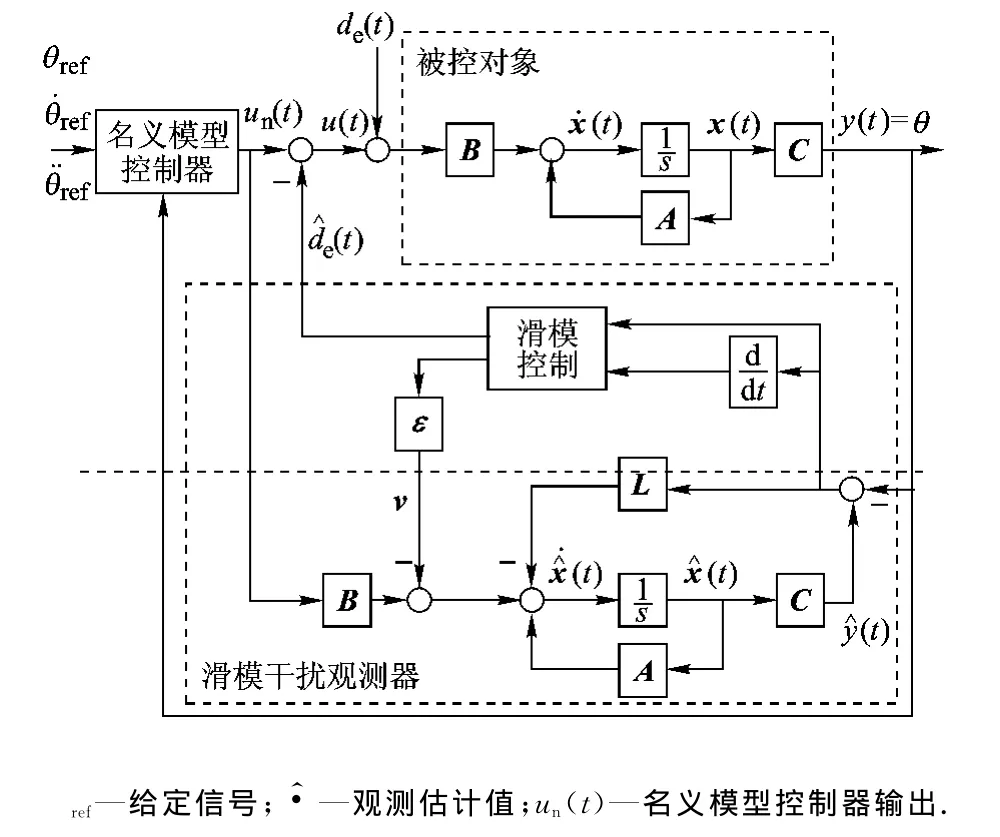
图2 伺服系统结构图
先假设θref(t)=0,de(t)=0,这时式(3)可表示为

系统的控制律采用:

令观测器的误差为



滑模运动包括趋近运动和滑模运动两个过程,对于带有不确定性和干扰的系统,一般采用的控制律为等效控制ueq加切换控制uss,即uo=ueq+uss.
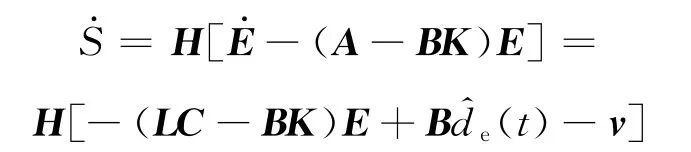
由式(5)~式(7)得到观测偏差系统方程为

滑模控制在跟踪轨迹时,非线性干扰等诸多不确定因素会给系统带来稳态误差,使性能指标无法达到满足.而积分器的引入可以使得控制器具有很强的自适应能力,增强了系统的鲁棒性,因此为了解决这一问题,本文结合反馈控制理论采用了包含E的积分型滑模面函数,其表达式为
设计滑模控制趋近率为

滑模面反馈增益矩阵选取如下的形式:

定理1 对于含有非线性不确定项的式(4)设计式(5),采用式(9)、式(11)和式(13),设计参数矩阵L,使得式(8)中的A-LC为Hurwitz矩阵,矩阵K的设计采用式(14)的形式,则滑模观测器渐进稳定,同时对式(4)中的de(t)进行有效估计.
证明 选择Lyapunov函数为

其中,P为对称正定矩阵.


根据Moore-Penrose逆矩阵性质可知:H+=(HHH)+HH,则

将式(16)代入式(15),得
其中,B,H 都是正常数矩阵,选择适当的ε,使(HB)-1Hε<0成立,又有Q>0,可知V·<0,即状态估计误差最终趋向于零,观测器是渐近稳定的.
为了减小滑动模态呈现的抖振现象,用饱和函数代替符号函数sgn(S):

其中,Δ是一个正实数,表示边界层的厚度.
2.3 K的设计
式(9)中的矩阵K 可以采用LQR(Linear Quadratic Regulator)最优控制理论方法进行设计.该部分的设计针对的对象是线性定常系统,即由系统观测误差所构成的线性误差系统,可表示为

因为式(18)是可控的,可以任意地配置A-BK的特征值到期望的位置,从而保证滑模运动具有较好的渐近收敛特性,此时会有E→0.根据LQR最优控制理论,可设计最优状态反馈控制律为

使得二次型性能指标:


此时,式(9)将变为E·=(A-BK*)E,可认为是式(18)关于J的最优状态轨迹.
3 加速度控制器的设计
目前伺服控制器的设计可以分为两个不同的方面:①基于指令响应的设计;②基于渐进或有限时间内收敛的Lyapunov条件的设计.这两种方法都可以归结为加速度的控制结构.
为了选择适当的控制力矩来使平衡点处的控制误差达到稳定,本文选择与输出误差相关的力矩加速度作为控制输入信号,其控制结构图如图3所示.
定义跟踪误差e=θ-θref,假设给定的参考信号具有二阶时间导数.定义广义跟踪误差:其中c是正常数.如果要完成σc渐进收敛于零,闭环系统的理想渐进收敛律将被设计为其中kc为比例增益系数.因此式(2)中的线性控制输入的设计分为两个过程:①设计等效加速度②设计收敛性加速度此时,系统的期望加速度可以表示为可以从已知的控制输出中推导得到可由理想收敛律中具体得到.

图3 基于加速度控制的控制结构图


根据图3所示的系统控制结构,将式(7)代入式(2),闭环控制系统等式为
式(2)可以表示为
d~的估计可以借助于跟踪误差来完成,选择控制回路的Lyapunov函数:
其中,γ为正常数,则


4 仿真实验结果
为了验证本文所提滑模干扰观测器方法的有效性,本文针对某型号光电跟踪平台进行了仿真实验,系统相关参数如表1所示.
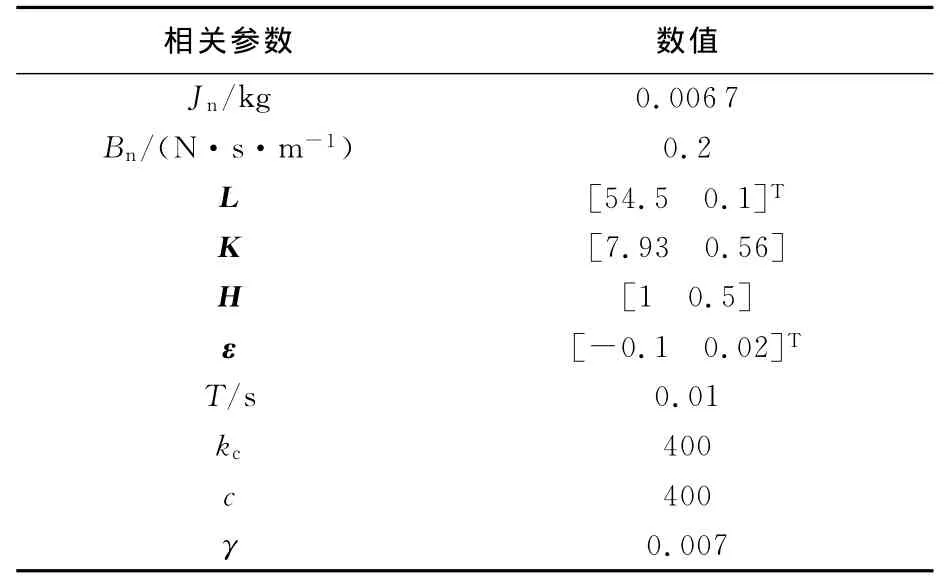
表1 仿真实验相关参数
可以根据A,B及C判断出该系统为能控且能观测的系统.由模型的不确定性和外界其它干扰引起的干扰因素按0.05sint给出.为了验证系统低速性能,系统给定的参考信号为幅值是0.01dB,频率是0.025Hz的三角波.系统中非线性摩擦采用LuGre动态模型[12].
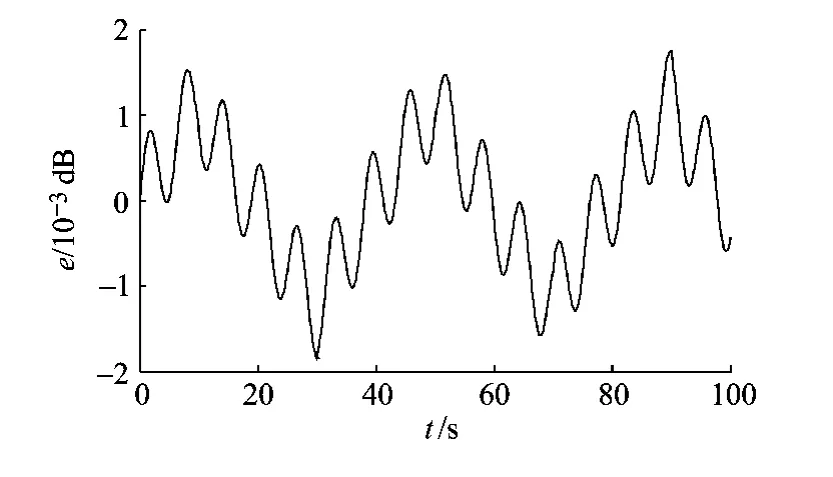
图4 未引入干扰观测器的位置跟踪误差
图4为系统未引入干扰观测器进行干扰补偿的仿真结果,图5为采用文献[11]中所提的等效输入干扰观测器进行干扰补偿的仿真结果,图6~图8为引入本文所提的新型滑模干扰观测器进行干扰补偿的仿真结果.图9为针对某型号光电跟踪平台,采用本文所提方法进行干扰补偿的实验结果.

图5 引入EID估计的位置跟踪误差
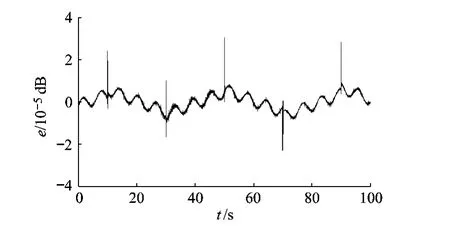
图6 引入滑模干扰观测器的位置跟踪误差

图7 引入滑模干扰观测器的位置跟踪
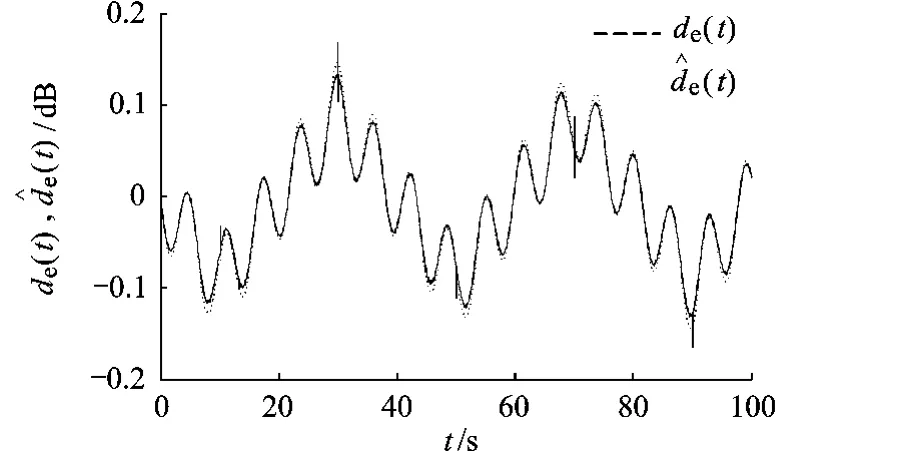
图8 实际干扰信号de(t)与估计值
从仿真结果中可以看出,引入滑模干扰观测器可以有效地估计出包括摩擦在内的非线性干扰信号,通过对其的补偿,大大消弱了非线性干扰对系统低速性能的影响,提高了系统的鲁棒性.与仿真结果相比,实验跟踪曲线误差相对较大是由测量元件的测量噪声及测量精度等原因引起的.
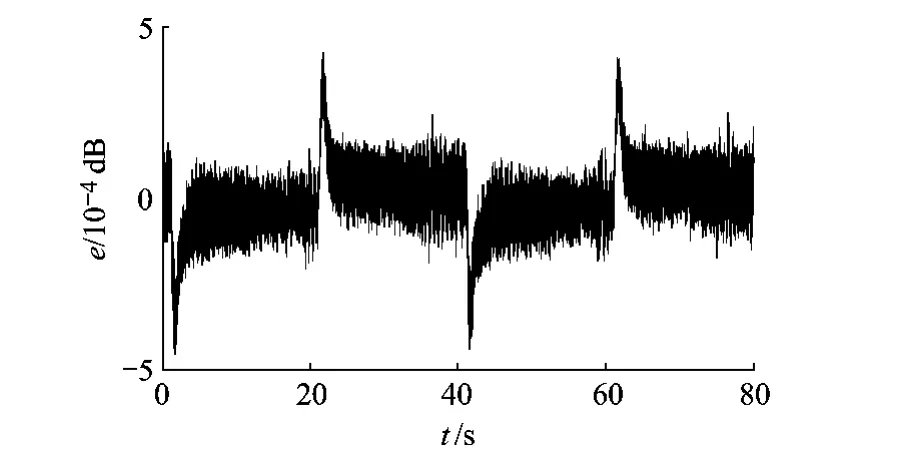
图9 采用滑模干扰观测器的实际系统位置跟踪误差
5 结 论
伺服系统在低速和小输入信号的作用下,摩擦等非线性干扰对系统性能的影响更为突出,因此针对系统中存在的各种干扰,本文提出了一种滑模干扰观测器的设计方法,有效地估计出系统的等效输入干扰信号.通过对观测器增益矩阵和滑模面反馈矩阵的设计,提高了滑模干扰观测器的动态性能,同时给出了该滑模干扰观测器的设计方法与稳定性证明.自适应加速度稳定控制器的设计进一步补偿了滑模干扰观测器的估计不足问题,更好地保障了系统低速运行时的平稳性与跟踪精度,增强了系统的鲁棒性.通过仿真与实验结果,验证了所提方法的有效性,该方法具有一定的工程应用价值.
(
)
[1]Downey G A.Electro-optical tracking considerations II[J].SPIE Acquisition,Trackingand Pointing XVII,2003,5082:139-153
[2]Vladimir V N,Mounor B,Victor A S,et al.Lyapunov based decentralized adaptive control for laser beam tracking systems[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1191-1200
[3]Orzechowski P,Chen N,Gibson S,et al.Adaptive control of jitter in a laserbeam pointing system[C]//2006American Control Conference.Minneapolis:IEEE,2006:2701-2705
[4]Harris A,Sluss Jr J J,Refai H H,et al.Alignment and track-ing of a free-space optical communications link to a UAV[C]//24th Digital Avionics Systems Conference.Washington:IEEE,2005,1:1-9
[5]刘强.高性能机械伺服系统运动控制技术综述[J].电机与控制学报,2008,12(5):603-609 Liu Qiang.Survey on motion control technologies of high performance mechanical servo systems[J].Electric Machines and Control,2008,12(5):603-609(in Chinese)
[6]Toyoshima M,Takayama Y,Takahashi T,et al.Ground-tosatellite laser communication experiments[J].IEEE Aerospace and Electronic Systems Magazine,2008,8(23):10-18
[7]Elbuluk M,Li Changsheng.Sliding mode observer for widespeed sensorless control of PMSM drives[C]//2003IEEE Industry Applications Conference.SaltLake City:IEEE,2003:480-485
[8]祝晓辉,李颖晖.基于扰动滑模观测器的永磁同步电机矢量控制[J].电机与控制学报,2007,11(5):456-461 Zhu Xiaohui,Li Yinghui.Vector control for PMSM based on disturbance SMO[J].Electric Machines and Control,2007,11(5):456-461(in Chinese)
[9]赵林辉,刘志远,陈虹.一种车辆状态滑模观测器的设计方法[J].电机与控制学报,2009,13(4):565-570 Zhao Linhui,Liu Zhiyuan,Chen Hong.Design method of slidingmodel observer for vehicle state[J].Electric Machines and Control,2009,13(4):565-570(in Chinese)
[10]Lu Y S.Sliding mode disturbance observer with switching gain adaptation and its application to optical disk drivers[J].IEEE Transactions on Industrial Electronics,2009,56(9):3743-3750
[11]She Jinhua,Fang Mingxing,Ohyama Y,et al.Improving disturbance rejection performance based on an equivalent input disturbance approach[J].IEEE Transactions on Industrial Electronics,2008,55(1):380-389
[12]刘海荣,刘金琨.Lugre摩擦模型的模糊神经网络辨识仿真研究[J].计算机仿真,2007,24(1):80-82 Liu Hairong,Liu Jinkun.Simulation of fuzzy neural network identification with Lugre friction model[J].Computer Simulation,2007,24(1):80-82(in Chinese)
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
大电机技术(2022年2期)2022-06-05
海军航空大学学报(2021年1期)2021-09-01
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
通信电源技术(2020年22期)2020-03-27
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年7期)2016-11-16