
渐开线环形齿球齿轮传动原理与运动分析
2013-12-22 01:54
河南科技 2013年7期
(巩义市第三中等专业学校,河南 巩义 451252)
随着我国科学技术的不断发展,齿轮技术也得到了不断的进步和发展。从我国现有的圆柱齿轮、圆锥齿轮以及非圆柱形齿轮传动的现状来看,三者均只具备1 自由度,无论其回转轴处于相对平行、相交或者是交错的位置,都仅仅只能传递两轴线相对位置固定不变的一维回转运动。然而,随着一些领域对于齿轮技术要求的不断增加,相关学者也根据其需求在传统的齿形设计上做了一些相应的改进措施,出现了渐开线环形齿球齿轮传动机构,这种机构本身具有2 运动自由度,可以传递二维回转运动。因这种二维球面运动特性正是自然界中绝大多数生物运动关节所共有的,所以国内外许多学者对球形齿轮传动进行了研究。
1 渐开线环形齿球齿轮的传动原理
渐开线环形齿球齿轮的传动需要多个环节构成的,无论是哪一环节出现问题,都会在一定程度上影响其传动效果。因此,相关部门的技术人员必须要对这些环节进行全面系统的了解,从而确保渐开线环形齿球齿轮的传动的有效性。
1.1 新型球齿轮及其齿廓曲面的形成
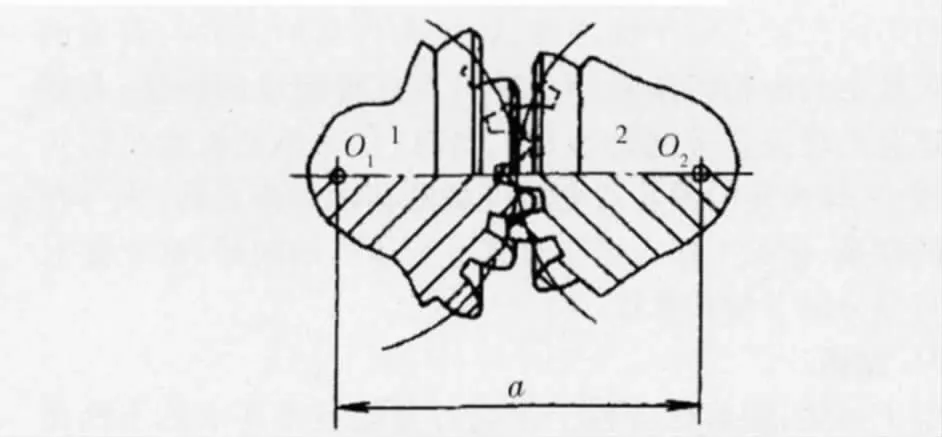
图1 新型球齿轮的形成
从图1中我们能够看出,该图表示的是两个圆柱形球齿轮的端面,其中,O1和O2是两个圆柱形球齿轮的中心,a 为两个齿轮中心之间的距离,O1O2作为两轮的中心连线,不仅通过一个齿轮的齿顶中点,而且同时还通过了另一个齿轮的齿间中点。如此,如果我们将这两个平面啮合齿轮绕O1O2旋转360°,便能够得到一对球齿轮,如图2所示:

图2 球齿轮结构图
通过该旋转我们能够看出,图1中所涉及到的圆在图2中都变成了相应的球,比如说齿顶球、齿根球以及分度球等。在这种情况下,如果将齿轮1 和齿轮2 分别安装在一组2 自由度的万向框架上,保持齿轮1 和齿轮2 分别绕球心Ol和O2作定点运动,就形成了球齿轮机构,具体结构图如图3所示。在结构进行运动的时候,为了能够充分实现精确的定传动比球面运行,需要机构中有一对节球作纯滚运动。
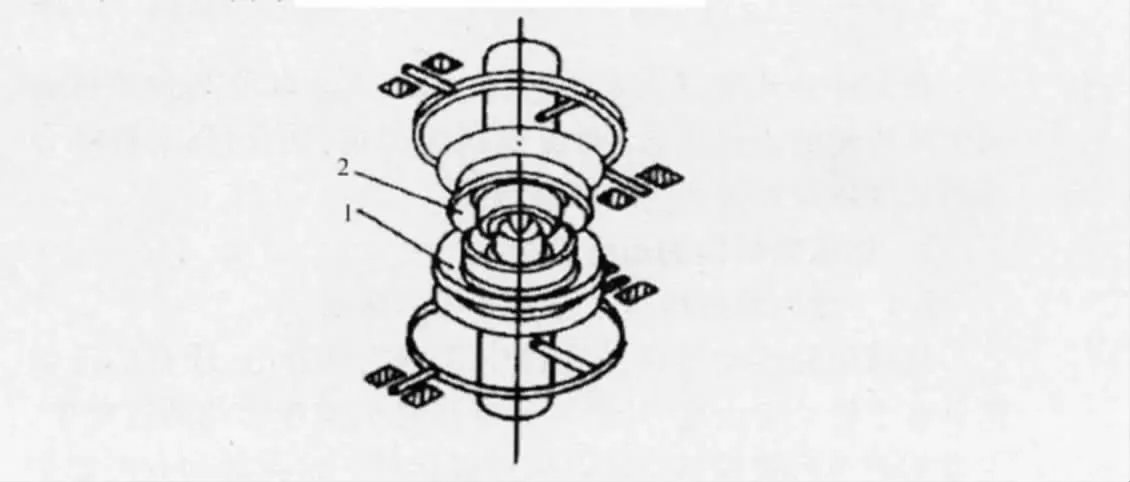
图3 球齿轮机构结构图
对于渐开线环形齿球齿轮传动原理的分析,我们可以利用图4来进行详细说明。如图4所示,在环形渐开线齿面生成图中,C 和直线K-K 分别为基圆和发生线,而N、S 则为基圆和旋转轴的两个交点,发生线K-K 与旋转轴始终在基圆平面P 内。当发生线K-K 在基圆上作纯滚动,且随基圆平面P 一起绕旋转轴作回转运动的时候,K-K 上任一点的轨迹都可以形成球齿轮的齿面。而这些任一点所形成的轨迹便可称为基球。由此可见,在过旋转轴的任意剖面内的齿廓曲线均为渐开线,所有渐开线的集合构成为一个环状曲面。因此,该球齿轮的齿面为一个环形渐开线曲面。

图4 环形渐开线齿面的生成结构图
1.2 球齿轮传动的啮合特点和正确啮合条件
了解球齿轮传动的啮合特点和正确啮合条件对渐开线环形齿球齿轮的有效传动具有重要的作用。在一对球齿轮啮合进行传动的时候,其中所涉及到的节球在传动过程中,通常都只是做纯滚动,所以,在实际啮合的时候,两轮齿廓从头到尾都是点与点之间的接触。而实际接触线形成一个圆环这种情况只有在两轮极轴处在共线位置的条件下才能够出现。由此可见,在球齿轮传动的啮合的过程中,会出现一个偏摆平面,该平面指的是两极轴和两球心的连线从头到尾都处于一个平面内,同时,这个平面也是齿面在啮合点的公共法平面。通过该平面,不仅能够充分完成齿廓啮合点的公法线移动,而且还能够有效构成两个尖顶相对的圆锥面。
1.3 球齿轮机构的连续传动条件
球齿轮机构的连续传动,只有在满足一定条件的情况下才能够充分完成。对于球齿轮,其啮合点和啮出点一般情况下分别处于从动球齿轮的齿顶球和啮合锥的相交线上和主动球齿轮的齿顶球与啮合锥的相交线上,这两个交线都是一个圆。由此可以看出,当球齿轮机构传动过程中,无论其往哪个方向偏摆,只要其偏摆运动始终在一个平面上,那么啮合点便会始终沿着啮合锥的母线进行移动,其实际啮合线的长度也就是两个圆锥母线的长度。在此条件下,球齿轮的运动几乎就会和一对直齿轮的运动完全相同,运行中所产生的啮合线长度也相等。所以,在对其相关的重合度进行计算的时候,所采用的计算公式也完全相同。具体公式如下:

在上述公式中,Zv1,Zv2、αa1,αa2、α‘、lB1B2以及Pb分别代表两个球齿轮的当量齿数、两齿顶圆压力角、啮合角、实际啮合线的长度以及相邻两齿的法向齿距。
2 球齿轮机构的运行分析
2.1 球齿轮机构运动分析的数学基础
从球齿轮传动原理的探讨中我们能够看出,现有的球齿轮具有2 转动自由度,从而导致球齿轮机构在运动的过程中,主要的表现形式就是绕定点的球面运动。这种运动方法如果用数学的方法来分析的话,那么可以采用的方法为共原点的两组坐标架绕任意轴的旋转变化关系。如图5所示,坐标系Oxjyjzj是由Oxiyizi绕任意轴K 旋转而得到的。因此,我们可以将ym 轴假设为任意轴,在这个时候,坐标系Oxiyizi到Oxjyjzj的转动,我们就可以看作为3次转动之后的结果,这3次转动分别为以下几个步骤:
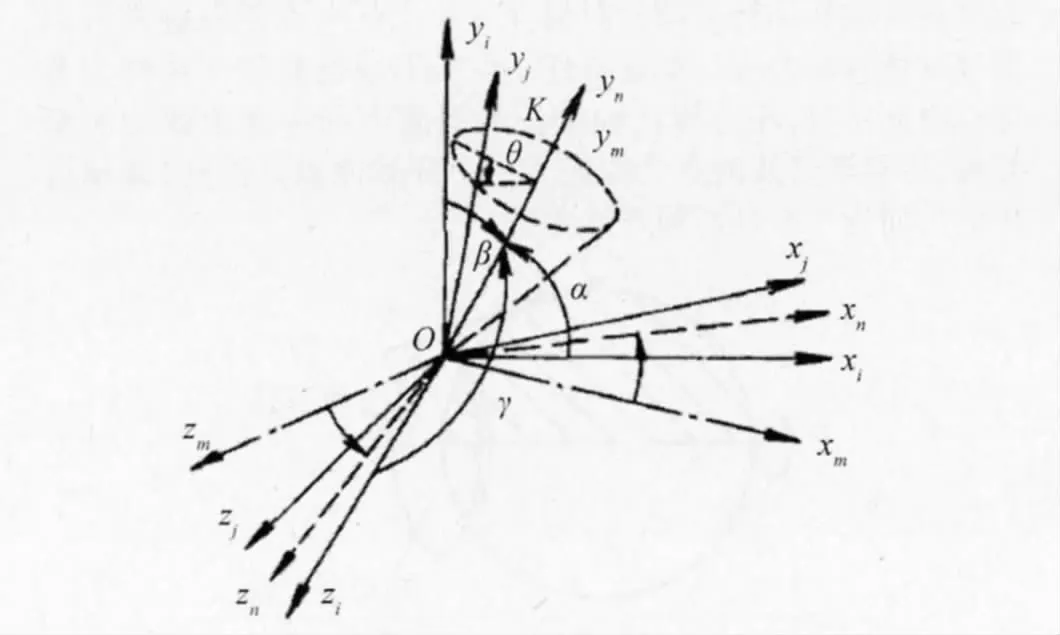
图5 两组坐标架绕任意轴的移动
将yi绕某轴旋转一定的角度到达ym,以此来完成整个坐标系Oxiyizi到Oxmymzm的转动,完成该转动之后,再将转动之后的坐标系绕ym转动一定的角度,完成坐标系Oxmymzm到Oxnynzn的转动;最后,将yn转开至yj,从而完成Oxnynzn到Oxjyjzj的转换。
2.2 球齿轮齿盘机构的运动分析
在球齿轮齿盘机构中,当球齿轮作为主动件的时候,可以将球齿轮的二维转动转换为齿盘的平动,然而当齿盘作为主动件的时候,就可以将齿盘沿X-Z 方向的平动,转换为球齿轮的二维旋转运动。由此可见,球齿轮齿盘机构能够在一定程度上实现二维旋转运动与平行运动之间的相互转换,这种运动特性刚好能够应用于抛物天线姿态控制执行机构。

图6 球齿轮齿盘机构的坐标架
如图6所示,我们可以根据球齿轮齿盘机构的坐标架的实际情况对坐标系进行选择如下:
(1)固定坐标系C10 =[D10,x10,y10,z10]和C20=[O20,x20,y20,z20]。
(2)齿轮1 固连的坐标系Cl=[O1,x1,y1,z1]。(3)齿轮2 固连的坐标系C2=[O2,x2,y2,z2]。
从以上列出的坐标系中我们能够看出,在球齿轮齿盘机构传动过程中,机构中所涉及到的齿轮的分度球和齿盘的节平面从头到尾都在做单纯的滚动动作,齿盘极轴的最末端初始位置地方相应的坐标和球齿轮轮输出轴最末端初始位置地方相应的坐标分别为(X10,Y10,Z10)和(Xe0,Ye0,Ze0),这两个坐标值均为(0,1,0)。由此可见,在球齿轮进行传动的时候,如果将其从初始位置往任意一个方面偏转一定角度的话,那么在该方向所处在的平面之内,球齿轮齿盘的运动与普通的圆柱齿轮中的齿轮齿条运动几乎不存在很明显的区别,有些时候还会出现完全等同的现象。同时,在球齿轮齿盘机构传动过程中,球齿轮的偏转角度与齿盘的移动距离之前,也存在一定的联系,相关工作人员在对其进行运算的时候,必须要对其进行充分的了解和掌握。
3 结语
综上所述,随着社会各个领域对齿轮技术要求的不断增加,渐开线环形齿球齿轮作为双自由度齿轮机构的典型代表,在未来的时间里,必然会得到广泛的应用。但是我国目前对于这种齿轮机构的研究现状来看,还存在很多不成熟的地方,还不足以让更多的人认可其实际的使用价值,因此,在未来的时间里,相关部门的技术人员依旧需要对其中的一些技术进行不断的优化与完善,从而使其应用价值充分的发挥出来。
[1]潘存云,温熙森.渐开线环形齿球齿轮传动原理与运动分析[J].《机械工程学报》.2005(05)
[2]李强,潘存云,徐海军.基于渐开线环形齿球齿轮齿盘传动的定向平台动力学建模研究[J].《兵工学报》.2011(09)
[3]李常义.渐开线环形齿球齿轮传动强度计算方法研究[D].《国防科学技术大学》.2004
[4]李婷.渐开线环形齿球齿轮传动理论研究[D].《国防科学技术大学》.2009
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
内燃机工程(2021年6期)2021-12-10
重型机械(2020年3期)2020-08-24
装备制造技术(2020年12期)2020-05-22
物流技术与应用(2020年4期)2020-05-06
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
制造技术与机床(2019年10期)2019-10-26
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年11期)2017-12-18
