
基于传声器阵列的声定位成像系统研究与设计
2014-01-16 05:57刘言赵平
电子设计工程 2014年6期
刘言,赵平
(西北工业大学 电子信息学院,陕西 西安 710129)
声源定位技术是利用声学与电子装置接收声波以确定声源位置的一种技术。它产生于第一次世界大战,根据火炮发出的声响测定炮火的位置。随着雷达探测技术的兴起,声源定位一度受到冷冻。但近年来,由于雷达面临电子干扰、反辐射、隐身技术等诸多威胁,人们又开始重视被动式声源定位。它的主要特点是不受通视条件限制、隐蔽性强、不受能见度限制。声源定位在战场之外同样具有广泛的应用背景,它可用于视频会议,视频监控和大型会场,车载电话系统,故障诊断,声控机器人,助听器,计算机语音识别系统等领域。
基于声传感器阵列的声源定位[1]方法大体上可分为3类:①基于到达时延(TDE)的定位技术。②基于可控波束形成的定位技术。③基于子空间的定位技术。本文采用基于TDE[2]的定位方法的计算量比其它两种小,有利于实时处理。这类方法还可以用于像语音这样的非平稳宽带信源。在只有单个信源时能较好的工作,定位精度与TDE估计精度有关。文中选择具有分维特性、阵列冗余较小的平面五元十字阵,以达到测量误差最小的目标。并且在现有的声定位技术上进行了创新,将原有的对单个声源点的定位,扩展为对多个声源点的声信号采集和处理,仿真实验证明了设计的声阵列定位成像系统的行之有效性。
1 TDE算法
基于时延估计的声源定位算法适合于宽带信号,计算量小,实时性较好,对硬件要求低。这种方法假设信号到达任何一个拾音器的波形只和拾音器的位置和波阵面的角度有关,则拾音器接受信号之间的延时就可以通过接受信号的相似度来估计。
时延估计方法有很多,其中广义互相关法(GCC)[3]是应用最为广泛的。广义互相关法通过求两信号之间的互功率谱,并在频域内给予接受信号一定的加权,来抑制噪声和反射的影响,再将加权后信号反变换到时域得到两信号之间的互相关函。其峰值位置即为两信号之间的相对时延。广义互相关方法进行时延估计的流程如图1所示。
以两个拾音器为例,设 I1(n),I2(n)分别是信号源到拾音器之间的冲激响应,这两个拾音器接受到的信号分别为

图1 广义互相关方法进行时延估计的流程Fig.1 Abroadcross-correlationmethodsfortime-delayestimationprocess
式中,V1(n),V2(n)表示传输过程和采集过程中的噪声,此处假设为高斯白噪声。

式中,H1(ω),H2(ω)分别为 H1(ω),X2(ω)的匹配滤波器频域响应函数。
拾音器对信号间的广义互相关函数为
式中,φ12(ω)=H1(ω)H*2(ω)称为广义互相关加权函数。根据具体的环境,选取不同的 φ12(ω),以使 R12(τ)产生更高的峰值。
2 平面五元十字阵
在各种阵形定位方法[5]中,五元十字阵有利于室内布阵,对三维空间的目标定位精度高,所以本文采用五元十字阵对室内小目标进行定位。平面五元十字阵的定位原理如图2所示。

图2 平面五元十字阵定位原理Fig.2 Positioning principle of Planar five-element Array
它有5个声传感器构成,以0号传感器声中心为坐标原点建立坐标系,另外4个边缘传声器的声中心对称的位于XOY平面上的坐标轴上,各个传声器的声中心距0号传声器的声中心均为L。目标声源P的直角坐标为P(x,y,z),球坐标为(R sinθcosφ,Rsinφcosθ,Rcosθ),其中 R 为目标距离,θ为目标俯仰角,φ为目标方位角。假设目标为点声源,目标声源入射波到4个边缘传声器的延时为τ1-4,声速为C。声阵和目标的几何位置关系,分别利用余弦定理可得:


经过处理化简最后可得:
3 室内声场混响模型及声信号预处理
我们根据房间内声音信号传播和相互影响的特点,建立了房间混响脉冲响应模型。并且根据模型,对语音信号进行一系列的预处理,主要包括预滤波和加窗分帧,并且针对可能的多声源情况,对每路传感器采集的信号进行白化处理。
预滤波是语音信号预处理的第一步。我们通过带通滤波器进行处理,设置上截止频率为fH=5 000 Hz、下截止频率为fL=60~150 Hz,采样频率为fS=10 kHz。预滤波的目的有两个:1)抑制输入信号各频域分量中频率超出/2的所有分量(为采样频率),以防止混叠干扰。2)抑制50 Hz的电源工频干扰。
经过数字化的语音信号实际上是一个时变信号,为了能用传统的方法对语音信号进行分析,应假设语音信号,在10~30 ms短时间内是平稳的。为了得到短时的语音信号,要对语音信号进行加窗分帧操作。一般每秒的帧数约为33~100帧。分帧采用交叠分段的方法,帧移与帧长的比值一般取为0~1/2,分帧是用可移动的有限长度窗口进行加权的方法来实现的。在加窗的时候,一般考虑两个问题:1)窗函数形状,我们在语音频谱分析时通常使用汉明窗来获得分段语音,而在计算短时能量和平均幅度时则通常使用矩形窗。2)窗函数长度N,不论什么样的窗函数,窗函数的长度对能反映语音信号的幅度变化起决定性的作用。通常认为一个语音帧内,应含有1~7个基音周期。所以在10 kHz的采样频率下,N折中选择为100~200 点(即 l0~20 ms持续时间)。
4 实验系统设计及过程
实验设计中,我们构建了声阵列定位系统,首先由声阵列采集实验环境中的声音信号,声传感器工作状态为:工作电压+12 V、工作电流20 mA、频率响应20~20 kHz、输出电平1~5 V、输出电阻600Ω。5个声传感器构成五元十字阵,每个声传感器的输出线与MPS010602信号采集卡的一个输入端口相连接,信号采集卡工作电压为+12 V,并可以将信号输入到电脑中通过LabVIEW[4]进行处理。通过对所接收到的信号进行相干处理后得到信号时延值,将所得到的值输入编写好的matlab(labview自带窗口)程序,继而通过计算可得到声源位置。系统设计的结构流程图如图3所示。

图3 系统设计结构图Fig.3 Schematic diagram of the test system
5 数据采集处理及实验仿真
对于五元十字阵进行实际实验操作,通过传感器采集信号,并在系统中对所采集的信号进行处理,一路信号的波形输入如图4所示。
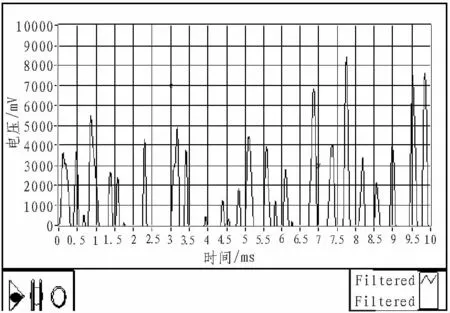
图4 一路输入信号波形Fig.4 One input signal wavefo
用两路传感器进行采集,采集的信号及处理结果如下:相关函数峰值的位置对应了时延估计值,由于采样率的限制时延估计结果只能取到199 Ts,在这种情况下可以通过插值提高时延估计精度。利用时域相关法对空气中实验采集信号进行时延估计处理,采用全指向性传声器。发射信号采用随机音乐声信号,信号采样率20 kHz,采样长度t=1.09 227 s,即采样点N=21 846,图5为其中两路信号时域波形(左)和频谱图(右)。

图5 两路信号时域波形图与频谱图Fig.5 Two-way signal time-domain waveform and frequency spectrum
由信号频谱图可知:信号能量主要集中在5 kHz以下,且频谱不规则,所以需要采用广义相关法对信号进行预处理以提高时延估计精度,广义相关时延估计结果如图6(左)。相关函数峰值的位置对应了时延估计值,由于采样率的限制时延估计结果只能取到199.5 Ts,在这种情况下可以通过插值提高时延估计精度。对高阶累积量时延估计方法进行仿真。如图 6(右)所示。
利用高阶累积量能实现时延估计,成功抑制高斯干扰源的影响。可以看出,高阶累积量时延估计结果和广义相关法时延估计结果相同,而且高阶累积量时延估计结果峰值相对更加明显。将所得时延值代入编写好的对声源点的计算的程序中,得到声源位置,在实验环境下进行多次定位。如图7所示。我们选择阵形大小L=0.705 m,将阵形用于室内声源目标定位,声速取C=340 m/s,在综合考虑阵形安装误差取0.5 m,声速误差30μs,以及时延估计精度0.5 m的情况下,仿真计算时延估计精度对定位结果的影响。如图8所示。

图6 广义时延相关估计和高阶累积量时延估计Fig.6 Generalized delay-dependent estimate and Cumulant delay estimation
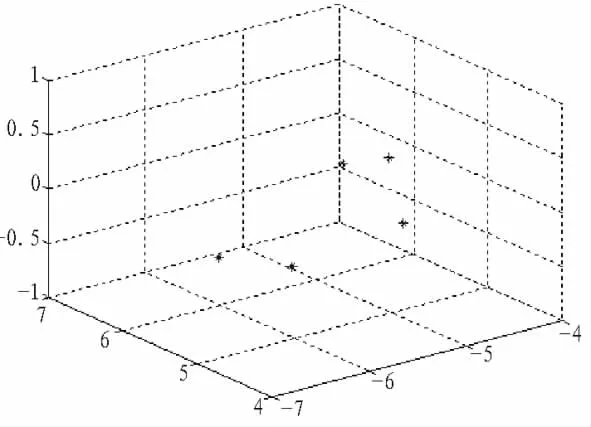
图7 多次声源目标定位结果Fig.7 Multiple sound source localization results
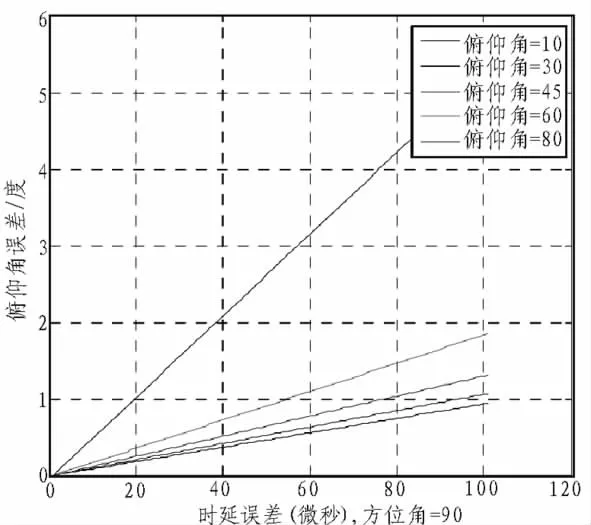
图8 俯仰角误差与时延估计误差关系曲线Fig.8 Pitch angle error and delay estimation error curve
经过分析定位精度推导公式[6]和仿真精度图,可知对平面五元十字阵,时延估计的方位角和俯仰角误差与声速,阵元间距和俯仰角有关,与方位角无关,也就是平面五元十字阵的空间定位精度在平行于基阵x,y轴形成的平面上是按距离大小分布的,定位精度与声源和矩阵间的距离有关,而与声源的水平方向无关。
6 结 论
本文在时延估计、定位算法的研究基础上,结合虚拟仪器等,实现了声阵列定位成像系统的设计。文中研究了五元十字阵的目标被动声定位算法,对其定位性能进行了理论分析和仿真。仿真结果表明设计的系统可行,能够达到比较高的定位精度,定位误差小,能满足精确被动声定位的要求。本文的研究对室内低空目标的定位,跟踪和识别均有重要的研究参考价值和工程应用前景。
[1]陈华伟.低空目标声测无源定向理论与算法研究[D].西安:西北工业大学,2004.
[2]Benesty J,Chen J D,Huang Y T.Time dely estimion via linear interpolation and across correlation[J].IEEE Trans Speech and Audio Processing,2004:21-23.
[3]QIN Bo,ZHANG Heng,FU Qiang,et al.Sunample time dely estimion via improved GCC PHAT algorithms[C]//Bo Qin:Interalnational Conference on Signal Processing,2008:25.
[4]陈锡辉.labview 8.20程序设计从入门到精通[M].北京:清华大学出版社,2008.
[5]Phatak SA,Ratnam R.Effect of reflectors on Sound Source location with two micro-phones[J].Audio Engineering Society,2006,54(6):512-524.
[6]林志斌,徐柏龄.基于传声器阵列的声源定位[J].电气技术,2004(5):19-24.LIN Zhi-bin,XU Bai-ling.microphone array-based sound source localization[J].Electrical Technology,2004(5):19-24.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
文史春秋(2022年4期)2022-06-16
数学大王·趣味逻辑(2021年3期)2021-03-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年23期)2019-02-23
汽车观察(2018年12期)2018-12-26
测控技术(2018年4期)2018-11-25
数学大世界(2018年1期)2018-04-12
雷达学报(2017年1期)2017-05-17
