
基于能量回馈技术再并网系统的设计与实现
2014-01-23 10:45杜红宇
吉林大学学报(理学版) 2014年4期
薛 鹏,魏 巍,杜红宇
(长春工业大学电气与电子工程学院,长春 130012)
基于能量回馈技术再并网系统的设计与实现
薛 鹏,魏 巍,杜红宇
(长春工业大学电气与电子工程学院,长春 130012)
针对有源能量回馈控制问题,通过分析电机制动状态下电流波形和能量转换过程,并在同步旋转dq坐标系下建立三相电压型并网逆变器的数学模型,采用直接电流控制的空间矢量脉宽调制(SVPWM)算法,实现了并网回馈电流有功分量和无功分量的独立控制,并搭建了能量回馈系统的实验平台,完成了三相并网逆变器的电阻负载实验和并网回馈实验.该系统解决了能量回馈过程中注入电网时产生的问题,并能实现网侧单位功率因数控制.
能量回馈;三相并网逆变器;控制策略
调速电机在工业生产中应用广泛,很多工业生产设备都要求调速电机快速启停、频繁正反转运行或带位能性负载重物下放,这就需要电机四象限运行,即电机处于再生发电状态.由于一般调速电机的控制器在电机制动发电运行状态下产生直流电能,而控制器的储能器件容量有限.为不使直流电压升高,通常采用由斩波器将直流电能消耗在功率电阻上,或采用有源能量回馈单元将直流电能回馈到交流电网,后一种方案具有体积小、节能降耗等优点,所以调速电机的能量回馈问题成为该领域的关注热点.目前的能量回馈系统主要配合变频器使用,成本相对较高、控制复杂,响应的快速性也达不到永磁同步电机的要求,因此不适合永磁同步电机使用[1-3].本文设计一种基于能量回馈技术的电网电压定向并网系统,将永磁同步电机制动运行状态下产生的电能馈送回三相交流电网中,实现从永磁同步电机到直流母线、再从直流母线到三相交流电网的能量回馈,不仅能解决电压过高的问题,还能取代大体积制动电阻带来的散热问题和能源浪费问题.
1 能量回馈系统与并网模型的建立
能量回馈系统可将由电机发出的能量回馈到交流电网中,实现从电机到交流电网的能量回馈,图1为能量回馈系统的总体结构框图[4-5],其中虚线框内的逆变电路采用三相全桥的拓扑结构,并通过滤波电感与电网相连.当逆变器以单位功率因数进行并网回馈时,能量回馈系统输出的电流就是与三相电网电压同频同相的交流电.由于并网是工频电,逆变过程中产生的高频分量通过谐波抑制的方式滤掉,因此模型的建立过程可忽略高频干扰.当永磁同步电机工作在制动工作状态时,通过对流过并网滤波电感上的三相电流进行控制,进而控制a,b,c三点的电压,在保持母线电压稳定的前提下,将电机发出的电能逆变为与电网电压同频同相的交流电进行并网[6].
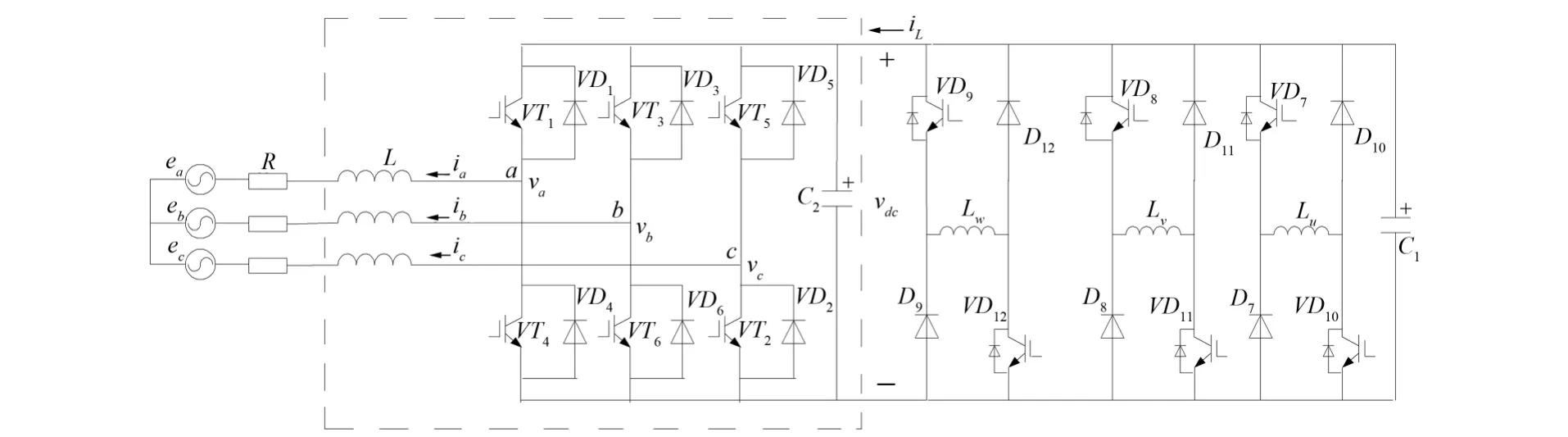
图1 能量回馈系统结构Fig.1 Energy feedback system structure
假设三相电网电压为

其中:Em表示电网电压的幅值;相序为A相超前B相超前C相.假设能量回馈系统以单位功率因数进行并网回馈,则并网回馈的电流与电网电压同相,并网回馈电流的基波为

其中Im表示并网回馈相电流的幅值.
能量回馈系统主电路低频状态下三相ABC静止坐标系的数学模型为


图2 ABC-dq坐标变换的矢量关系Fig.2 Vector relationship of ABC-dq coordinate transformation
其中:ea,eb,ec表示三相电网电压;ia,ib,ic表示三相并网电流;L表示三相滤波电感;R表示其等效电阻;v a,vb,v c表示逆变器输出电压.
由数学模型可见,系统需要控制流过滤波电感上的三相电流,且均为时变的交流量,因而不方便控制.为了解决该问题,系统采用矢量解耦的方法,通过坐标变换的方式将三相静止的ABC坐标系转换为同步旋转的dq坐标系(旋转角速度ω=2πf,其中f=50 Hz),则其矢量变换关系[7]如图2所示.其中θ为电压矢量e与A轴的夹角,这样三相电网电压的瞬时值即为电压矢量e在ABC三相坐标轴上的投影,d轴方向为A旋转θ角后的坐标方向.设电网电压矢量e与d轴重合,则将三相电网电流的合成矢量i在dq坐标轴上投影,则i在d轴上的投影i d为电流的有功分量,i在q轴上的投影i q为电流的无功分量,初始条件下,d轴与A轴重合.于是可得并网逆变器在同步旋转的两相直角坐标系下的数学模型[8].
将数学模型由三相ABC静止坐标系下转换到两相静止αβ坐标系下,设三相ABC静止坐标系的A轴与α轴重合,简化能量回馈系统逆变主电路在两相αβ静止坐标系下的数学模型为

再将两相静止αβ坐标系下的数学模型转换到两相旋转dq坐标系下,可得能量回馈系统主电路在两相旋转dq坐标系下的状态方程为

简化后可得能量回馈并网数学模型

分别控制id,iq便可实现对能量回馈系统有功功率和无功功率的控制.
2 能量回馈并网系统的控制策略
系统采用基于电网电压定向的直接电流控制方式,设系统的无功分量=0.通过采样两相电网电压ea,eb,可通过程序算出ec,然后进行锁相,从而获得电压频率和相位信号,将其作为回馈电流的频率和相位的给定值.对回馈电流进行采样,通过坐标变换后得到id和i q,先与程序内部给定的基准和做PI调节,然后对PI调节后的结果做解耦运算和电网电压的前馈控制,再经过dq-αβ坐标变换后得到Uα,Uβ.将坐标变换后得到的Uα,Uβ进行SVPWM运算即可得到驱动IGBT导通的占空比信号,从而实现单位功率的并网回馈[9].
由数学模型可知,能量回馈系统在dq坐标系下的数学模型可表示为

其中ed,eq表示电网电压E dq在dq坐标系下的矢量分量;v d,vq表示能量回馈系统逆变器主电路交流侧电压V dq在dq坐标轴上的矢量分量;id,iq表示能量回馈系统逆变器主电路交流侧电流I dq在dq坐标轴上的矢量分量;p表示微分算子.
经变换后有

由式(8)可知,通过电流状态反馈量的引入,可实现d轴和q轴电流的独立控制.将ed,eq作为电网电压前馈补偿的引入,提高了能量回馈系统的动态性能,并实现了系统的解耦控制策略.
为了满足电机在四象限运行时的动态响应,在设计PI调节器时,需着重考虑电流内环的随动性和快速的动态响应[10].因此,本文的PI调节器采用典型的Ⅰ型系统设计,同时考虑采样延时Gh(s)=1/(1+TsS),其中Ts表示PWM的开关周期.按小信号建模法分析,在未加入电网电压的扰动量时,能量回馈系统电流调节器的开环传递函数为

其中:K c表示电流反馈系数;KPWM表示变换器PWM等效增益;Ts表示PWM的开关周期.从而能量回馈系统电流调节器的闭环传递函数为

当能量回馈系统的电流环调节器按典型的Ⅰ型系统设计时,电流环近似一阶惯性传递函数,其惯性时间常数为.显然当开关频率足够大时,即PWM的开关周期Ts足够小,电流调节器具有快速的动态响应.
在MATLAB/Simulink动态仿真环境下,采用ode45s算法,对该能量回馈系统进行建模和仿真.该能量回馈系统的控制核心主要包括:由6只IGBT组成的三相桥式逆变主电路、坐标变换模块、SVPWM调制波生成模块、PLL锁相环模块、LCL滤波模块及PI调节等.同时,本系统在Simulink仿真阶段将直流母线电压用650 V直流电源模块代替,图3为能量回馈系统的仿真模型[12].
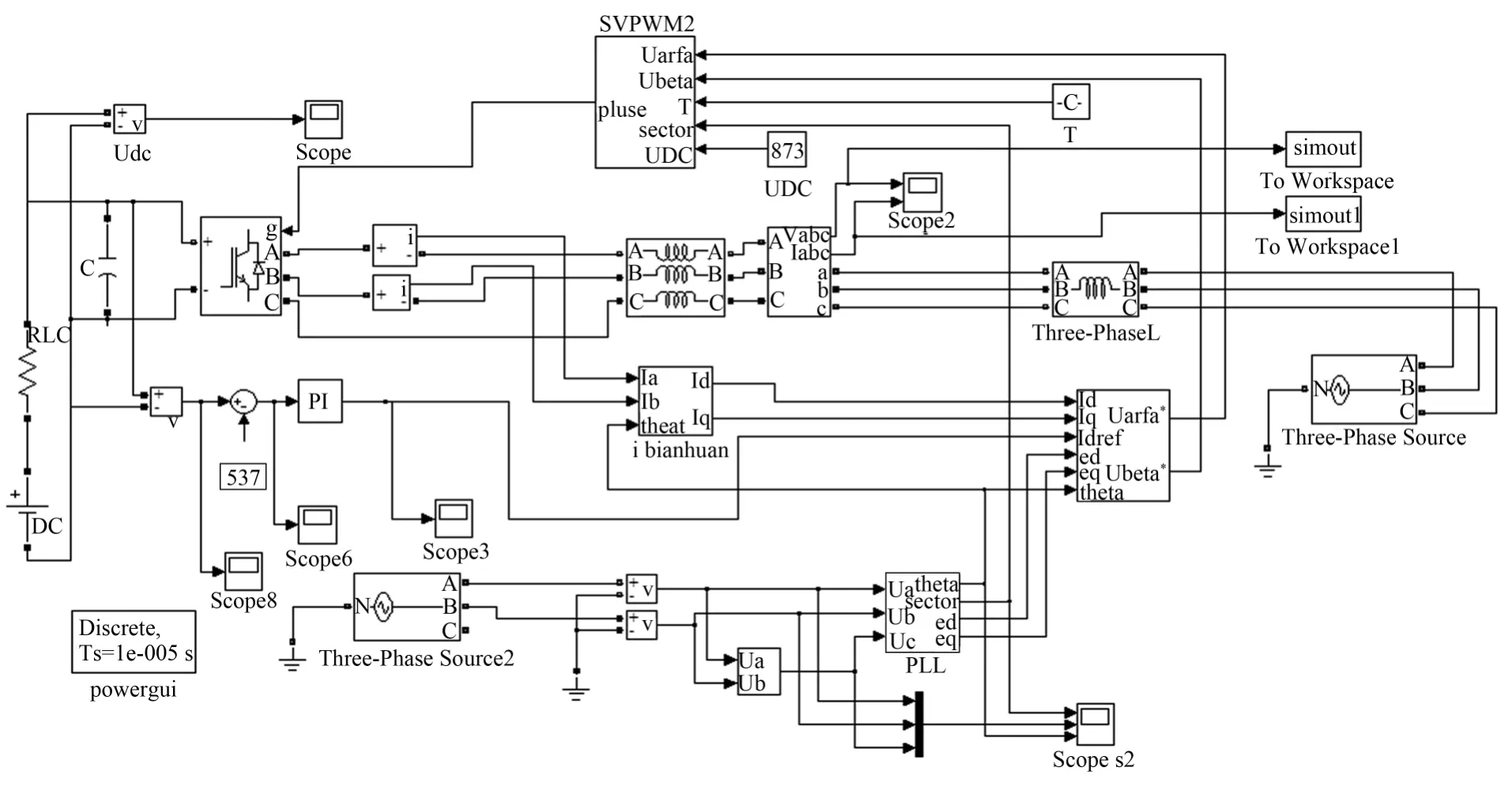
图3 能量回馈系统仿真模型Fig.3 Simulation model of energy feedback system
当系统稳态运行时,通过仿真可得到三相电网相电压和三相回馈电流波形如图4所示,回馈电流峰值为5.3 A.三相回馈电压波形和三相电网电压波形如图5所示.
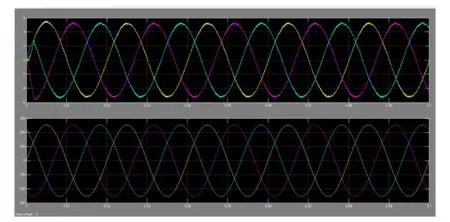
图4 回馈电流和三相电网电压的仿真波形Fig.4 Current feedback and three-phase voltage simulation waveforms
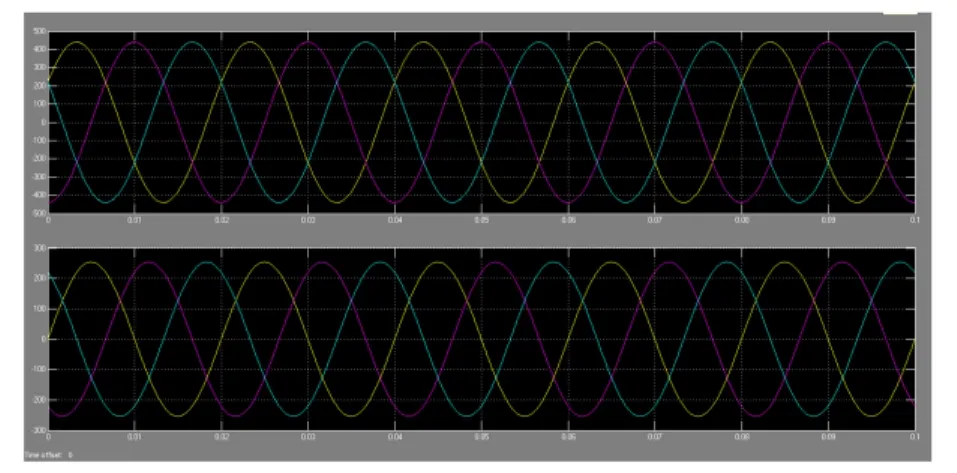
图5 三相回馈电压波形和三相电网电压波形Fig.5 Three-phase feedback voltage and three-phase voltage waveform
由图4可见,三相回馈电流波形与三相电网电压波形基本为严格的同频同相,因此能实现单位功率因数的并网回馈,且在回馈过程中该系统的响应速度非常快,能迅速进入稳定状态,达到平稳回馈.由图5可见,A,B,C三相回馈电压相位互差120°,与三相电网电压的周期相同,均为0.02 s,即频率为50 Hz.三相回馈电压的输出波形相对稳定,其相电压峰值为440 V,有效值为311 V,满足回馈并网的要求.
3 实验结果
搭建一个10 k W基于DSP TMS320F28335控制的永磁同步电机能量回馈系统实验平台,开关频率为3.3 k Hz,电网的相电压为220 V,频率50 Hz,该能量回馈系统采用电流内环和母线电压外环的双闭环控制方式,并通过电压电流检测电路及其调理电路将采样得到的三相电网相电压信号ea,eb,ec,并网回馈的相电流信号ia,ib,ic和直流母线电压信号v dc转换成0~3 V模拟信号,送入DSP的A\D端口.经坐标变换,增量式PI调节及SVPWM调制方式,由PWM端口输出六路PWM脉冲信号驱动六路IGBT,并具有开机缓启动、过流、过压保护措施,能量回馈系统并网实验的总体结构框图如图6所示.
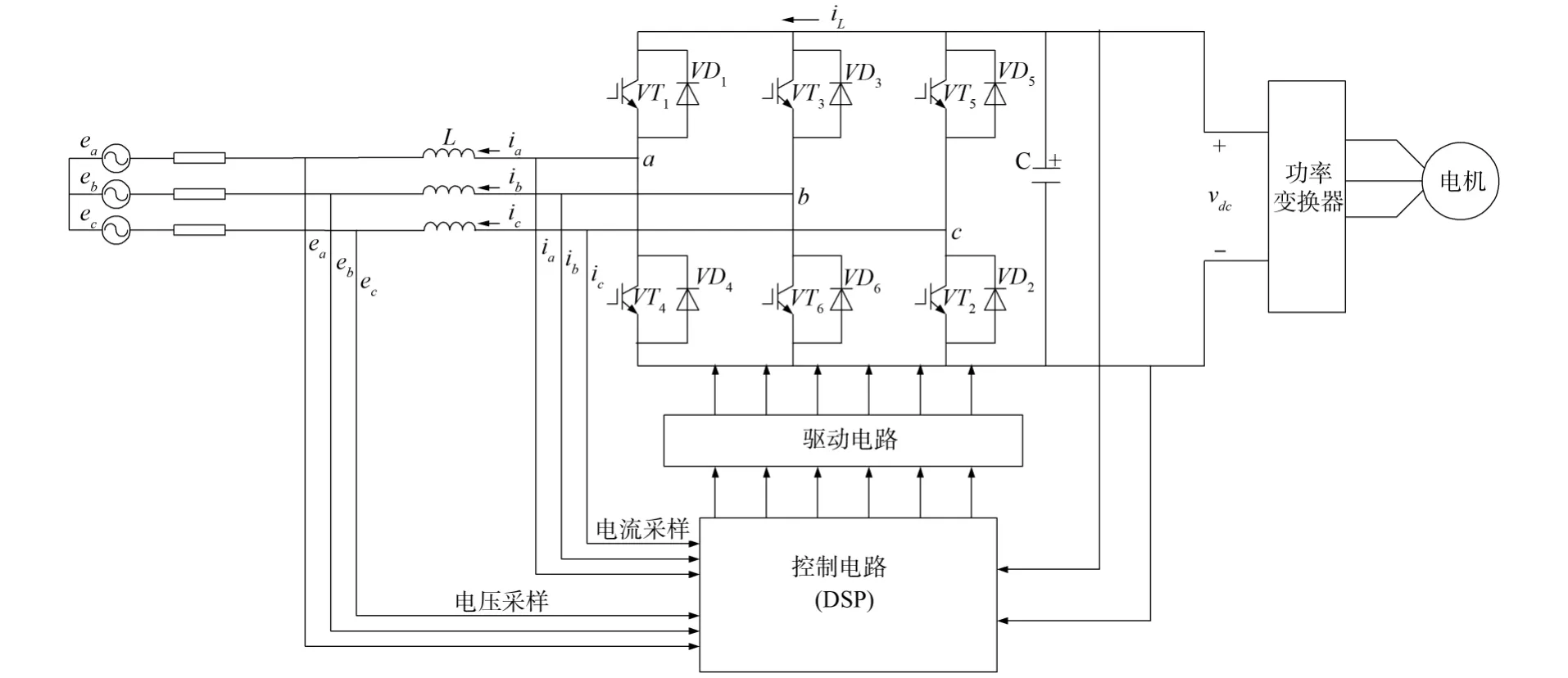
图6 能量回馈系统并网实验的总体结构框图Fig.6 Block diagram of the energy feedback system and grid experiment
进行并网回馈实验时,预先加好功率电,然后打开并网开关,最后打开驱动开关,输出的回馈电流在0.3 s内开始从0 A缓慢上升至程序中给定的电流值,电流幅值大小由所需并网功率的大小决定.如图7所示.当母线电压升高至650 V时,即达到能量回馈系统并网回馈的门限电压时,整个回馈系统将进行并网回馈,如图8所示,线电压U AB的相位超前线电压U BC120°,可知检测的电压相位正确无误.
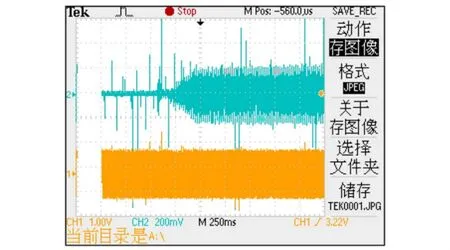
图7 电流启动波形Fig.7 Start current waveform
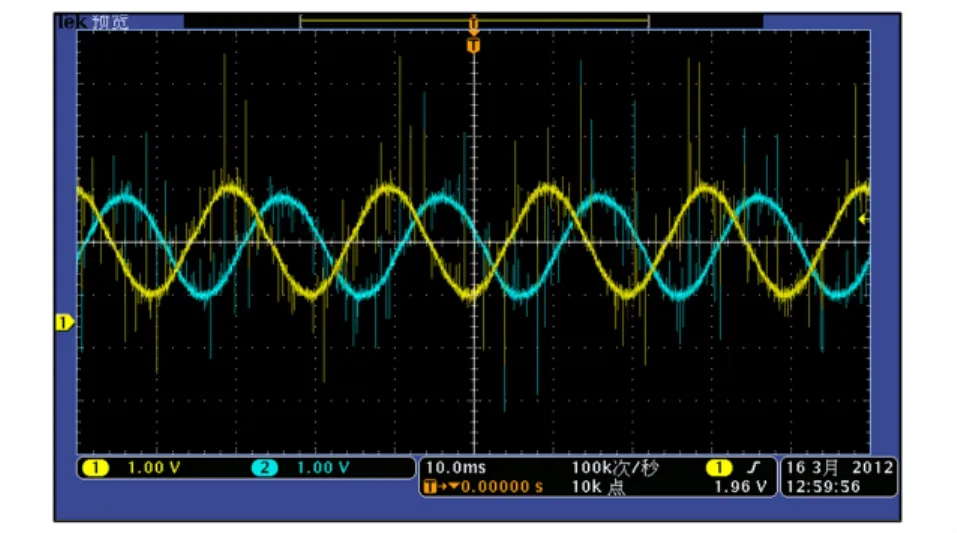
图8 电网侧线电压U AB和UBC的线电压波形Fig.8 Line voltage waveform of U AB and U BC
图9为两相电网线电压波形和两相并网回馈的相电流波形,其中CH1为电网侧U AB的线电压波形,CH2为电网侧U BC的线电压波形,CH3为输出回馈相电流Ia的波形,CH4为输出的相电流Ib的波形.由于电网线电压U AB的相位超前线电压U BC相位120°,可知检测的电压相位正确无误.又因为输出回馈相电流Ia的相位落后于电网线电压U AB相位30°,即回馈电流Ia于A相电压U A同向,从而实现了单位功率因数的高效率能量回馈.
综上所述,本文在不改变永磁同步电机原有主电路的基础上设计了基于电网电压定向的能量回馈系统配合永磁同步电机使用,将永磁同步电机制动工作状态下产生的电能回馈到三相电网,并达到取消制动电阻的目的.该能量回馈并网系统是在三相同步旋转dq坐标系下建立的数学模型,将输出的并网回馈电流在dq坐标系下分解为有功分量和无功分量.为了实现单位功率因数并网,在系统控制策略中将电流的无功分量设定为零.实验结果表明,该算法可优化输出的并网电流波形,减小了电流谐波的产生,提高了系统的动态响应.
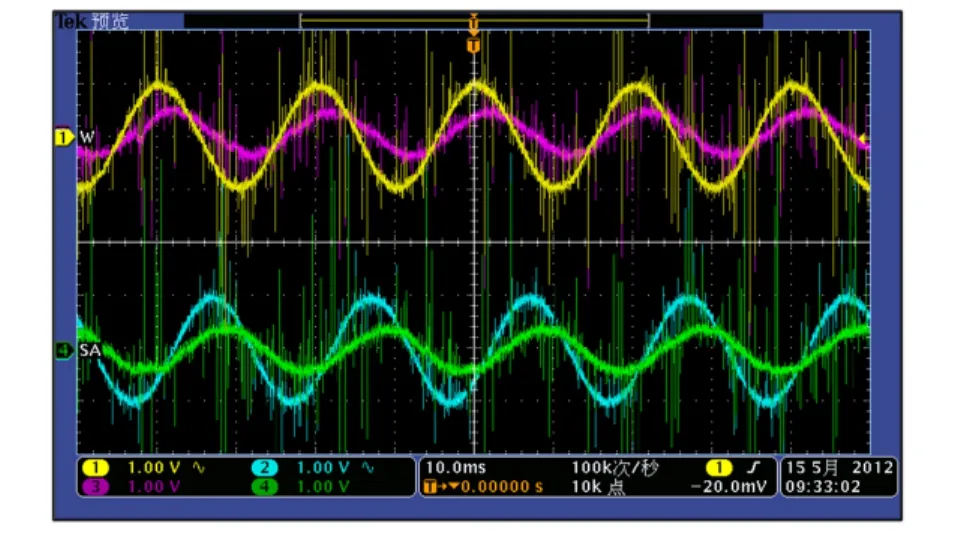
图9 两相电网线电压波形和两相并网回馈的相电流波形Fig.9 Line voltage waveform and grid feedback phase current waveform
[1] Kohlmeier H,Niermeyer O,Sehroder D F.Highly Dynamic Four-Quadrant AC Motor Drive with Improved Power Factor and On-line Optimized Pulse Pattern with Promc[J].IEEE Transaetionson Industry Applications,1987,23(6):1001-1009.
[2] Blaabjerg F,Pedersen J.An Integrated High Power Factor Three-Phase DC AC Converter for AC-Maehinesim Plemente Dinone Mieroeon-Troller[C]//IEEE 30th Annual Power Electronics Specialists Conference.Seattle,USA:IEEE,1993:285-292.
[3] ZHANG Huaqiang,MENG Fanhua,LIANG Zhiping.An Improved Direct Torque Control Algorithm Based on Flux and Torque Double Closed Loop[C]//IEEE 7th International Power Electronics and Motion Control Conference.Harbin:IEEE,2012:2372-2376.
[4] Noguchi T,Tomiki H,Kondo S,et al.Direct Power Control of PWM Converter without Power-Source Voltage Sensors[J].IEEE Trans on Industrial Applications,1998,34(3):473-479.
[5] Zelechowski M,Kazmierkowski M P,Blaabjerg F.Controller Design for Direct Torque Controlled Space Vector Modulated(DTC-SVM)Induction Motor Drives[C]//IEEE International Symposium on Industrial Electronics.Istanbul,Turkey:IEEE,2005:951-956.
[6] Tuomo Merentie.Direct Torque Control[J].Industrial Robot:An International Journal,2002,22:5-30.
[7] 李时杰,李耀华,陈睿.背靠背变流系统中优化前馈控制策略的研究[J].中国电机工程学报,2006,26(22):74-79.(LI Shijie,LI Yaohua,CHEN Rui.Study of the Optimum Feed-Forward Control Strategy in Back-to-Back Converter System[J].Proceedings of the CSEE,2006,26(22):74-79.)
[8] 冯江华,陈高华,黄松涛.异步电动机的直接转矩控制 [J].电工技术学报,1999,14(3):29-33.(FENG Jianghua,CHEN Gaohua,HUANG Songtao.Direct Self-control(DSC)of Asynchronous Motor[J].Transactions of China Electrotechnical Society,1999,14(3):29-33.)
[9] 吴凤江,汪之文,孙力.PWM整流器的改进虚拟磁链定向矢量控制[J].电机与控制学报,2008,12(5):504-508.(WU Fengjiang,WANG Zhiwen,SUN Li.Improved Virtual Flux Oriented Vector Control of PWM Rectifier[J].Electric Machines and Control,2008,12(5):504-508.)
[10] Jasiński M.Direct Power and Torque Control of AC/DC/AC Converter-Fed Induction Motor Drives[D].Warsaw:Warsaw University of Technology,2005:69-76.
[11] 张华强,王新生,魏鹏飞,等.基于空间矢量调制的直接转矩控制算法研究[J].电机与控制学报,2012,16(6):13-18.(ZHANG Huaqiang,WANG Xinsheng,WEI Pengfei,et al.Study on Direct Torque Control Algorithm Based on Space Vector Modulation[J].Electric Machines and Control,2012,16(6):13-18.)
[12] Malinowski M,Jasiński M,Kazmierkowski M P.Simple Direct Power Control of Three-Phase PWM Rectifier Using Space Vector Modulation(DPC-SVM)[J].IEEE Trans on Industrial Electronics,2004,51(2):447-454.
Grid System Based on Energy Feedback Technology
XUE Peng,WEI Wei,DU Hongyu
(CollegeofElectricalandElectronicEngineering,ChangchunUniversityofTechnology,Changchun130012,China)
In view of the active energy of motor feedback system,the current waveform and the energy conversion process of a motor in brake state were analyzed,and the mathematical model of the threephase voltage-type inverter grid was established in the synchronous rotatingdqcoordinate system,the independent control of the feedback current active component and reactive component grid was achieved with SVPWM direct current control algorithm,building experimental platform of motor energy feedback system in order to complete the resistive load experiments and feedback experiments of three-phase grid-connected inverters.The experimental results show that bidirectional flowing of the energy is implemented with energy feedback,and the harmonics are suppressed effectively.
energy feedback;three-phase grid inverter;control strategy
TP23
A
1671-5489(2014)04-0783-06
10.13413/j.cnki.jdxblxb.2014.04.29
2013-09-22.
薛 鹏(1979—),男,汉族,硕士研究生,讲师,从事自动控制和电气传动的研究,E-mail:xuepeng@mail.ccut.edu.cn.
国家科技支撑计划项目(批准号:2007BAB17B02)和吉林省重大科技攻关招标项目(批准号:20130204007SF).
韩 啸)
研究简报
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨铁道科技(2020年4期)2020-07-22
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年12期)2015-04-09
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
电机与控制应用(2013年9期)2013-11-21
- 吉林大学学报(理学版)的其它文章
- 基于改进蜂群算法的项目反应理论混合模型参数估计
- 人参三肽的序列分析