
全地面起重机塔臂工况下结构变形对幅度影响的研究
2014-01-31 07:23潘志毅田风帅
建筑机械化 2014年6期
赵 超,潘志毅,,陈 礼,李 杰,田风帅
(1.大连理工大学 机械工程学院,辽宁 大连,116023;2.大连益利亚工程机械有限公司,辽宁 大连,116023)
1 引 言
全地面起重机具有结构紧凑、越野能力强、起重量大、起升高度高、作业半径大以及适应能力强等诸多优点,逐渐成为移动式起重机市场的主力军[1]。

图1 全地面起重机塔式副臂工况结构简图
为了增大起升高度,通常在全地面起重机主臂上安装塔式副臂,其结构组成如图1所示。全地面起重机工作过程中容易受到主臂、塔式副臂、前拉板、后拉板及变幅拉板等诸多因素的影响。系统中结构变形影响幅度的精准性,增加了工程中幅度计算的难度。
国内外学者针对起重机主、副臂结构变形展开了广泛研究,但多是关于全地面起重机非线性、臂架优化和挠度变形等方面的研究,针对结构变形对幅度影响的研究较少。
本文通过解析法分别计算出主臂、前拉板、后拉板及变幅拉板的结构变形量,分析其对工作幅度的影响,并将解析计算结果与有限元计算结果进行对比,验证解析计算方法的可靠性。
2 全地面起重机塔式副臂工况力学模型简化
将全地面起重机塔式副臂工况下塔臂系统结构按照以下原则进行简化:塔臂系统中各构件自重视作集中载荷简化至构件质心;各构件为刚性构件,之间以铰接的方式连接,不计起升绳和变幅绳质量。依据主臂系统受力特点,将主臂自重以集中载荷形式作用于主臂整体结构质心,并考虑连接架对主臂的附加弯矩。简化的塔式副臂系统和主臂在变幅平面内的力学模型如图2所示。

图2中C为主臂臂头点,P为塔臂铰点,S为塔式副臂铰点,MV为前撑杆,NP为后撑杆,UM为前拉板,MN为后拉板,NO1为变幅拉板,OS为变幅副臂,OU为起升绳偏心距,OR为吊重偏心距;α为塔臂仰角,β为主臂仰角,γ为变幅油缸与水平线的夹角;Gtb为塔臂自重,Gqlb为前拉板自重,Ghlb为后拉板自重,Gblb为变幅拉板自重,Gqc为前撑杆自重,Ghc为后撑杆自重,Q为吊重。
塔式副臂系统模型中前拉板、后拉板及变幅拉板的轴力FUM、FMN、FNO1为未知力。分别以塔臂、前撑杆以及后撑杆为研究对象,对模型在S点、V点、P点列力矩平衡方程,可得
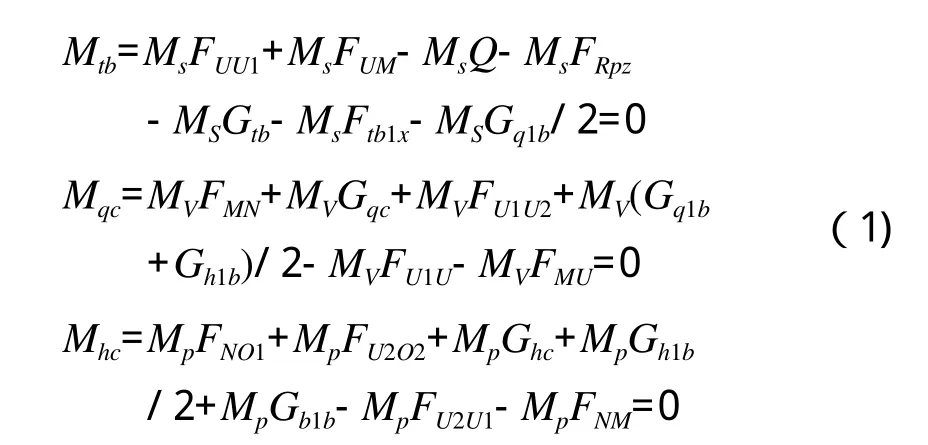
其中,对于同一构件,根据作用力与反作用力相等原理,可知

联立式(1)和式(2)可解得FUM、FMN、FNO1,进而可求得整个塔臂系统作用在P、S两点上的作用力FPx、FPy、FSx、FSy。根据平面汇交力系平移定理,将P、S两点的作用力转化到连接节C点处(主臂端部横截面与其轴线的交点),可得变幅平面内主臂头部的合力FC和附加弯矩MC

3 解析法计算结构变形对幅度影响研究
3.1 塔式副臂对幅度变化影响研究
在变幅平面内,考虑主臂在实际工况中的约束条件,将主臂简化为阶梯型外伸梁。对大吨位全地面起重机塔式副臂的空间桁架结构而言,采用等效惯性矩法将其简化为二维梁结构,依据塔式副臂在全地面起重机中的实际受力情况,将其简化为等截面的简支梁。由公式(3)计算的主臂塔式副臂计算如图3所示,依据式(4)可求得塔式副臂引起的幅度变化量ΔR1。


图3中λ1中为主臂与副臂的夹角,yzb为主臂挠度,Lfb为塔式副臂长度,θfb为塔式副臂挠度,为塔式副臂转角,y为副臂端部总挠度,y1为主臂挠度分量,y2副臂相对主臂挠度变化量。
3.2 拉板系统对幅度变化影响研究
拉板在轴向力作用下产生轴向变形,变形满足胡克定律。为研究拉板系统对幅度变化的影响,将除前拉板之外的其余构件视为刚体后,塔式副臂则会随着拉板变形的变化产生绕结点M的转动,当变幅拉板NO1长度增加时,线段NP和线段PO1之间的夹角会增加,线段NP及其以上部件将绕结点M按顺时针方向转动,引起幅度变化。
在点O1、N、P组成的三角形O1NP中:线段NP长度为l1且保持不变,线段NO1变形前长度为l30,其中方向角

线段PO1的长度为l2且保持不变,方向角为δ2且保持不变;线段NP与线段PO1之间的夹角为δ。显然,δ=δ1-δ2。
由公式(1)求得变幅拉板轴向作用力FNO1,依据胡克定律求线段NO1变形后长度为l3,则变幅拉板变形后的方向角

由变幅拉板变形所引起塔式副臂绕点M顺时针转角

相应的幅度变化量为Δβblb

同理,可求出前拉板、后拉板变形所引起塔式副臂绕结点M的转角Δδqlb、Δδhlb,求得相应的幅度变化值Δβqlb、Δβhlb。
考虑前拉板、后拉板、变幅拉板三者共同作用引起幅度的变化有

其中:k1,k2,k3分别为前拉板、后拉板、变幅拉板在起吊重物Q时的轴向力系数。
最后将各计算结果进行叠加

4 算例分析
本文以某500t全地面起重机塔式副臂系统为研究对象,在主臂57.7m、副臂63m、幅度36m、吊重15t工况下,分别计算主臂、前拉板、后拉板及变幅拉板对幅度变化的影响量。由解析法及有限元方法分别得到各部件结构变形对工作幅度造成的变化值,并求出计算误差,将其结果进行汇总如表1所示综合考虑各部件结构变形的影响,运用公式(10)求出总的幅度变化值为4064.1mm,有限元法计算总的幅度变化值为4187mm,计算误差为2.94%。

表1 不同构件的幅度变化量结果的对比表
5 结 论
1)全地面起重机塔式副臂工况为例,各部件结构变形引起的工作幅度值由大到小依次为主臂、变幅拉板、前拉板、后拉板。
2)由于前、后拉板分别与前、后撑杆形成稳定的三角形结构,其对幅度的影响较小;主臂是主要的承力部件,受力时变形较大,对工作幅度的影响较大。因此,设计时要重点考虑主臂和塔式副臂对幅度的影响。
3)解析算法求解出的臂架幅度的变化值与有限元计算结果基本吻合,解析法较有限元法计算出的结果偏小。该方法为计算全地面起重机塔式副臂工况下幅度变化值提供了依据,提高了设计效率。
[1]贾体锋,张艳侠.全地面起重机关键技术发展探析[J].建筑机械,2011,(Z1):55-61.
[2]刘木南,胡江林.全地面起重机塔式副臂起臂工况仿真计算[J].建筑机械,2013,(11):92-95.
[3]哈尔滨工业大学理论力学教研室.理论力学[M].北京:高等教育出版社,2007.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
机械工程与自动化(2021年6期)2022-01-18
农业装备与车辆工程(2021年10期)2021-11-03
汽车实用技术(2020年12期)2020-10-21
汽车实用技术(2019年16期)2019-09-11
北京航空航天大学学报(2019年8期)2019-09-10
西夏学(2019年1期)2019-02-10
制造技术与机床(2017年7期)2018-01-19
河南工学院学报(2017年1期)2017-06-07
武汉轻工大学学报(2016年1期)2016-04-26
