5MW风电机组控制策略研究与仿真
2014-02-10 08:28刘红文阮向艳万宇宾刘春秀符伟杰杜佳佳蒋韬
风能 2014年8期
文 | 刘红文 阮向艳 万宇宾 刘春秀 符伟杰 杜佳佳 蒋韬
5MW风电机组控制策略研究与仿真
文 | 刘红文 阮向艳 万宇宾 刘春秀 符伟杰 杜佳佳 蒋韬
随着风电技术的发展,变速变桨风电机组已得到广泛的应用,单机容量正朝大功率等级发展,据中国风能协会(CWEA)的统计数据,目前已出现了3MW-5MW商业化风电机组。然而,风电机组是一个多变量、强耦合的非线性系统,如何使风电机组能尽可能多的从风中捕获风能、提高其并网后的电能质量以及减小载荷,控制策略的选取和控制器的设计显得尤为重要。如何开发出适应于大功率等级风电机组的控制策略和控制器,成为热点研究问题。本文以NREL实验室(National Renewable Energy Laboratory)的5MW风电机组模型为研究对象,对风电机组的基本控制策略和改进控制策略进行分析和研究,利用Matlab对控制器进行时域、频域的仿真,在此基础上,以FAST(Fatigue, Aerodynamics,Structres,Turbulence)为整机仿真软件,分别以定常风和IEC标准定义的湍流风对控制器的性能进行仿真,结果表明:(1)额定风速以下时,转矩控制器能很好的调节发电机组转速,使风电机组运行在最优Cp点,捕获更多风能;(2)额定风速以上时,风电机组桨距控制通过桨距角的调节,使风电机组运行在额定功率点;(3)在风电机组控制策略中添加低通滤波器、陷波滤波器、扭振控制和塔架前后振动反馈控制,可以减小塔架振动,进而减小载荷。
变速变桨风电机组基本控制策略
对于变速变桨运行的风电机组,运行原理图如图1所示,其基本的控制目标为:(1)额定风速以下时,采用发电机转矩控制,跟踪最优叶尖速比,使风电机组运行在气动设计时的最大Cp处,从而捕获更多的风能;(2)额定风速以上时,采用变桨控制,维持发电机组的恒功率运行。
一、额定风速以下的转矩控制
由叶片的空气动力学特性,风电机组从风中捕获的能量为:
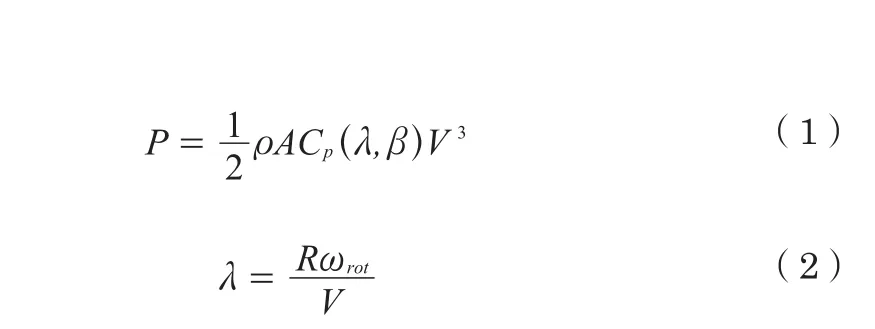
式(1)-(2)中:ρ为空气密度;A为风轮的扫风面积;λ为叶尖速比;为风轮转速;R为风轮半径;β为桨距角;V为风速;为功率系数,表征风轮从风中捕获风能大小的能力,是λ和β函数。
当风电机组运行在额定风速以下时,风电机组最优Cp运行,此阶段的桨距角β为恒定值(为最优桨距角)。因此,将式(2)带入式(1)得:

忽略传动链等功率损耗,则发电机功率即为风轮捕获功率,因此发电机转矩为:

定义齿轮箱增速比:

故式(4)可改写成:

图1 5MW风电机组功率曲线

定义最优增益:

因此,

由以上公式可知:额定风速以下时,为了尽可能的捕获风能,则必须保证Cp处于最优值,为了保证风电机组的叶尖速比,必须随着风速的波动,动态改变发电机组转速,发电机组转速的控制通过给定发电机组转矩实现。
二、额定风速以上的变桨控制
额定风速以上时,风电机组受机械结构强度、发电机、设计要求等条件限制,必须通过变桨,减小风能捕获,减小载荷,使风电机组维持在额定功率运行。在此阶段,发电机转速给定为额定值,因此可通过增加控制器,使风电机组转速维持在额定转速,其控制框图如图2所示。
若采用PI控制,PI控制器的传递函数形式为:

改进的控制策略
基本的控制策略没有考虑风电机组的动力学特性,因此无法考虑风电机组的共振、扭振等问题。当风电机组产生共振或者扭振时,风电机组的载荷急剧增大,影响关键零部件的安全性和使用寿命。因此,有必要在控制策略开发时,解决风电机组共振和扭振等问题,尤其是大型风电机组。
一、加入低通和陷波滤波器
当风轮转动时,1个叶片转动一周,对静止的机舱-塔架系统产生1P的激振力,对于3叶片风电机组,风轮转动一周,会产生3P、6P为主的激振力,当然还有9P、12P等高频分量。当风电机组的某一部件的固有频率与激振频率相同时,会引起共振,风电机组载荷急剧增大。因此,在进行控制器设计时,需根据风电机组的坎贝尔图,设计陷波滤波器,将3P、6P频率滤掉。陷波滤波器的传递函数形式为:

另外,发电机组转速为传感器测量信号,为了减小高频信号对控制器的影响,提高控制系统抗高频干扰能力,可在控制器设计时增加低通滤波器, 其传递函数形式为:
ω为无阻尼自然频率,ξ为阻尼,低通滤波器的Bode图如图4所示。
二、传动链阻尼扭振控制
对于变速恒频运行的双馈异步风电机组,当风电机组在额定风速以上运行时,发电机转矩给定为恒定值,阻尼很小。低阻尼的情况下,会引起传动链较大的扭振,进而引起齿轮箱的转矩波动,增加齿轮箱的疲劳载荷,加剧齿轮箱的损坏。因此,为了减小齿轮箱的载荷,当风电机组变桨控制时,在转矩给定值上增加一个很小的转矩波动,增加有效阻尼。风电机组传动链扭转振动与叶片面内一阶模态、塔架左右二阶模态直接相关,通过带通滤波器在转速测量值上将该特征频率取出,经增益、移相处理后,加入转矩指令,从而抵消扭振的谐振,有效增加阻尼效果,控制传动链扭转振动。设计时,增加一个带通滤波器,达到传动链扭振控制的目的,带通滤波器的传递函数为:
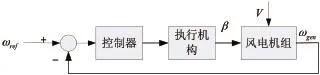
图2 变桨控制框图

图3 陷波滤波器的Bode图

其中,G为增益,用于产生转矩的辅助波动;ω应选取在阻尼振荡频率附近,即叶片面内一阶模态、塔架左右二阶模态附件,但必须避开3P,6P 频率;τ为为时间常数,用于补偿系统的时间滞后。
三、塔架前后振动控制
由于外部激振力的存在,塔架会在前后方向和左右方向振动。塔架前后方向阻尼很小,其对激振力的响应情况与叶轮有效机械阻尼相关。当风速达到额定风速以上,风电机组开始变桨动作,轴向推力在变桨过程中发生变化,作为塔架的外部激振力,如果不增加阻尼,塔架振动会很大,且以塔架前后一阶模态为主。而振动增大会增加载荷,因此在控制器设计时,需要调节变桨动作时的有效阻尼,对塔架前后一阶振动进行控制。塔架前后振动的动态特性可振动微分方程描述,如式(13)所示:

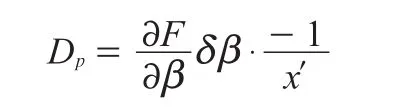
式(13)中,M为质量,D为阻尼系数,S为刚度系数。假设由于变桨引起激振力的变化为Δ,则塔架的振动微分方程可改写为:

附加阻尼Dp的计算为:
仿真与分析
以NREL-5MW风电机组为仿真模型,采用Matlab对控制器进行时域和频域分析,并用Simulink搭建控制系统,结合整机仿真软件FAST,建立风电机组的非线性模型和控制模型,对5MW整机动态性能进行仿真分析,5MW风电机组的参数见表1。
一、控制系统时域和频域分析
图6和图7分别为转矩控制设计和变桨控制设计时的Bode图,图8和图9分别为额定风速以下和额定风速以上时,对风电机组线性化后的模型的阶跃响应。图6和图7表明,在一定频率进行陷波滤波,避免共振。同时,从幅频特性可看出,控制器具有抗高频干扰的能力。图8和图9的阶跃响应表明,转矩控制器和变桨控制在相应的作用风速段是稳定的,调节时间均在10s左右,满足控制器设计要求。

图4 低通滤波器的Bode图
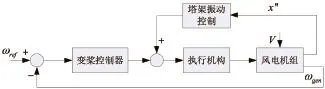
图5 塔架前后振动控制框图
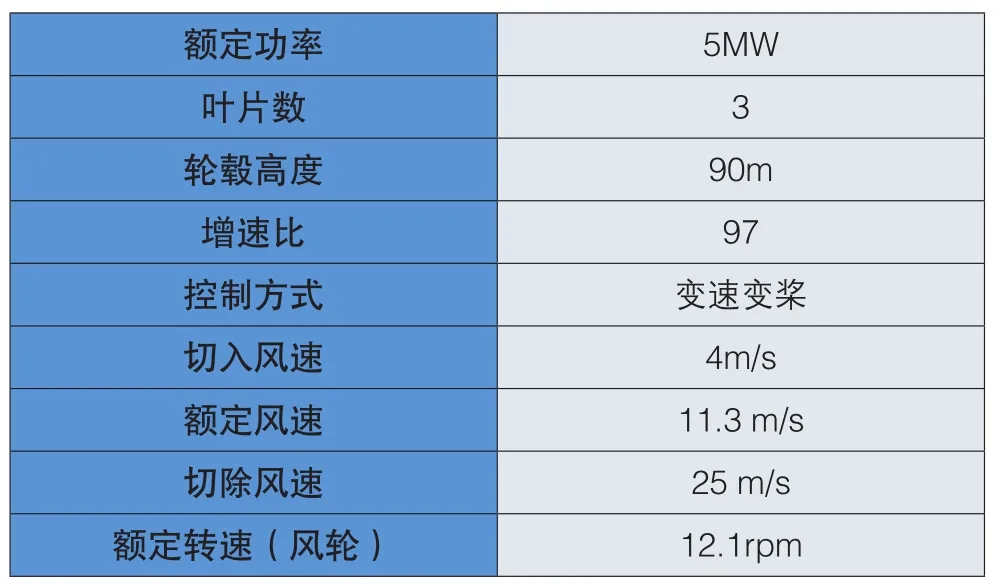
表1 5MW风电机组基本参数

图6 转矩控制设计时的Bode图
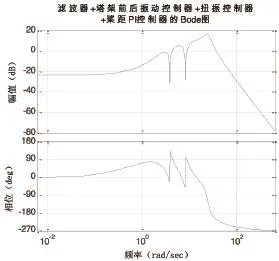
图7 变桨控制设计时的Bode图
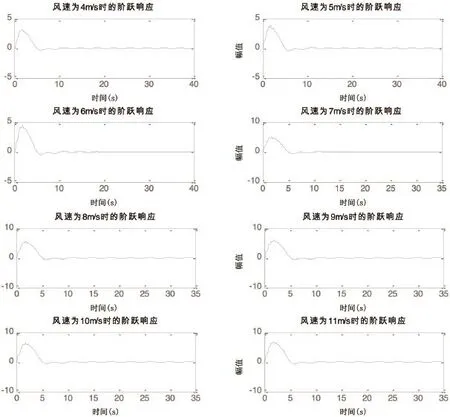
图8 风速为4 m/s-11 m/s时风电机组的阶跃响应
二、FAST整机性能仿真与分析
(1)仿真情形1:V=6m/s 的定常风
以6m/s的定常风为检验工况,测试转矩控制器的性能。FAST整机仿真结果如图10-图12所示。发电机功率和发电机转速变化曲线表明,转矩控制性稳定。图12表明,转矩控制器能较好的跟踪最优Cp,实现最大风能捕获。
(2)仿真情形2:V=18m/s 的定常风
以V=18m/s的定常风为例,检验变桨控制器的性能。图13-图15表明,变桨控制器性能稳定,维持发电机功率,实现变桨控制。
(3)仿真情形3:V=18m/s的IEC湍流风
以V=18m/s的IEC湍流风作为复杂工况,进一步检验控制系统的性能,其结果如图16-图20所示。
图17和图19表明,尽管风速频繁波动,但风电机组在控制器的作用下,发电机转速和桨距角能跟随风速的变化而变化,与控制策略吻合。图18表明,当风速在额定风速以上波动时,发电机转速和功率在额定附近有轻微波动,一方面由于风轮是一个大惯性系统,响应较慢;另一方面原因是变桨控制器根据转速误差,PI控制后得到桨距角,桨距角执行器会有一个执行时间,因此会出现延时,导致上述波动情况。图20表明,加入塔架前后振动控制,塔顶的振动幅值明显减小,进而减小载荷。
结语
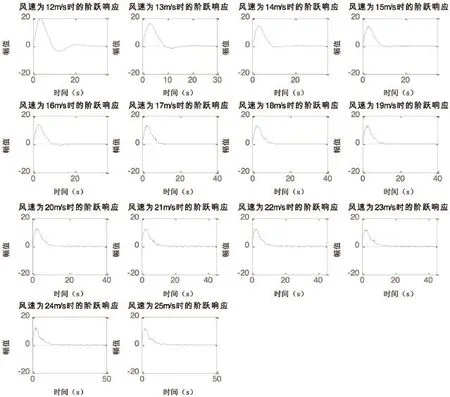
图9 风速为12m/s-25m/s时风电机组的阶跃响应

图10 发电机功率变化曲线
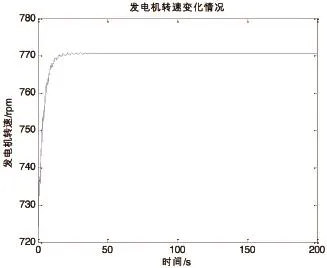
图11 发电机转速变化曲线

图12 Cp变化曲线

图13 发电机功率变化曲线
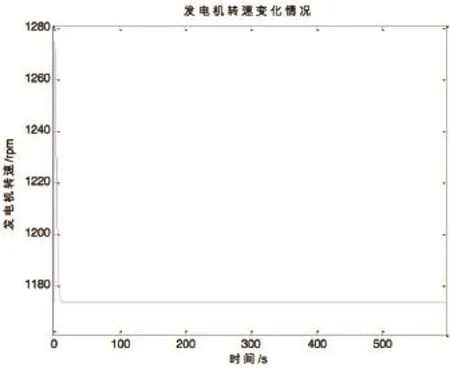
图14 发电机转速变化曲线

图15 桨距角变化曲线

图16 风速变化曲线

图17 发电机转速变化曲线

图18 发电机功率变化曲线
本文对风电机组基本控制策略进行了描述,并结合风电机组的动力学性能,对减小共振、扭振以及塔架前后振动的控制策略进行了研究,以5MW风电机组为例,对大型风电机组控制系统进行设计,用matlab对控制系统的时域和频域进行分析,并采用FAST整机仿真软件对控制器的性能进行验证,结果表明:(1)额定风速以下时,改进后的控制策略能保证风电机组最大风能捕获运行;(2)额定风速以上时,改进后的控制策略能保证风电机组恒功率运行;(3)改进后的控制策略能避免风电机组共振和扭振,减小塔架前后振动。
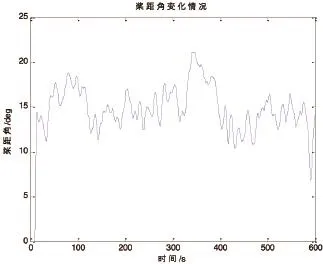
图19 桨距角变化曲线

图20 塔架前后振动
(作者单位:刘红文 万宇宾 刘春秀 符伟杰 杜佳佳 蒋韬:南车株洲电力机车研究所有限公司;阮向艳:中南大学信息科学与工程学院)
猜你喜欢
农业灾害研究(2022年9期)2022-11-19
机电信息(2022年19期)2022-10-15
农业技术与装备(2022年5期)2022-07-25
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
现代农业科技(2018年11期)2018-08-14
电机与控制学报(2018年9期)2018-05-14
中学生数理化·八年级数学人教版(2016年4期)2016-08-23
创新时代(2015年10期)2015-11-02