基于一体化视频车检器的车辆轨迹算法研究*
2014-02-11 02:48郝建豹
机电工程技术 2014年9期
关键词:一体化
郝建豹,冯 杨,桑 林
(1.广东交通职业技术学院机电工程系,广东广州 510800;2.深圳市新创中天科技发展有限公司,广东深圳 518055)
基于一体化视频车检器的车辆轨迹算法研究*
郝建豹1,冯 杨1,桑 林2
(1.广东交通职业技术学院机电工程系,广东广州 510800;2.深圳市新创中天科技发展有限公司,广东深圳 518055)
以德州仪器公司的达芬奇平台TMS320DM6446芯片为核心,对系统硬件各个主要模块进行分析设计,构建了一个一体化视频车检的硬件系统,最后选择现场能见度比较低的场合进行算法设计和实验。实验结果表明,该一体化车辆视频检测系统具有良好的检测效果,能够实现交通场景中的车辆检测计数,车辆跟踪、车辆定位等功能,为交通流诱导系统提供真实可靠的数据。关键词:一体化;视频车检;轨迹算法
0 引言
基于交通视频处理分析的交通视频检测系统,就是在获取道路实时监控视频的基础上,对交通场景视频进行车辆检测、车辆跟踪以获得视频场景中的有用交通信息。这样的检测方法和其他传统的检测方法如线圈、微波雷达相比,具有诸多优点如设备维护方便,无须将路面破坏,不会影响道路正常交通;视频检测范围大,可覆盖多个车道,可同时监控检测多车道;通过视频检测提供更全面的交通管理信息和交通事故信息,可得到的交通有车流量、车速、车流密度、车型、是否堵塞等;可以为交通管理部门提供可视化监控,方便管理,同时进行录像,方便以后进行事故录像提取查询。
但是现有的视频车检器一般使用模拟摄像机+嵌入式处理器的模式来构成,其笨重的体积、线路的繁琐和明显的功耗,极大的限制了此类视频检测器的应用[1]。同时图像传感器得到的原始图像数据需经过图像处理DSP芯片优化处理后,再行进行压缩,然后通过通信线路传输给嵌入式处理器的DSP芯片做图像识别运算,增加了系统处理时间[2]。
本文研究的一体化视频车检器采用一体化方案,将图像处理DSP芯片和图像识别分析DSP芯片合二为一,体积小巧,结构简单可靠,功能针对性强。全功能状态下功耗会降低约40%左右,可以方便的使用风、光发电机等再生能源供电装置。因采用达芬奇架构的双核数字多媒体处理器,处理速度大大提高。更为重要的是车检器中包含了视频采集、算法处理、数据通讯模块。车检器安装在前端路口,视频无需往中心传送直接实现了交通信息的检测,为交通流诱导系统提供真实可靠的数据。
1 一体化视频车检器设计
本文采用TMS320DM6446作为算法处理的核心芯片,其采用达芬奇技术架构,是基于ARM926和TMS32064x+DSP的高度集成的双核数字多媒体处理器,适合于数字信号的处理,特别是在视频处理方面[3]。本系统的硬件设计是在TMS320DM6446的基础上,扩展了一些外设电路实现的(如图1所示)。整个设计的系统框架分为两个层次。

图1 视频采集系统的系统框架图
(1)以ARM为中心的系统管理层部分
本部分包含FLASH存储模块、有线网络通讯模块和串口通讯模块。FLASH存储模块包含一块FLASH存储器,主要是用来存储ARM程序,DSP的程序和系统的一些配置信息。有线网络通讯模块则包含了一块局域网控制芯片,通过该网络通讯模块,视频采集系统可以通过本地局域网的网关接入到外部Internet网,实现与远程控制中心的有线通讯。为给配合信号机进行自适应控制,系统提供了一个UART口。
(2)以DSP为中心的交通视频处理的算法层部分
该部分的主要作用是交通视频的算法处理,主要包含输入模块、算法处理部分和视频输出模块。视频输入模块由一块视频解码芯片和视频存储芯片VRAM构成,主要作用是把视频信号(CVBS)经过视频解码芯片解码,变换成数字视频并存储到一片图像存储器(VRAM)上。算法模块是本系统最重要的模块,包含DSP、数据存储器DRAM和一块用于存储历史检测数据的FLASH。其主要作用是进行数字视频信息并行算法处理,把产生的动态交通信息按不同用途进行解析并上传或存储或叠加处置。视频输出部分由一片FPGA和视频编码芯片构成,其作用是把算法模块产生的当前动态交通信息叠加到视频图像上,提供给远程控制中心。
2 车辆轨迹跟踪算法
在车辆轨迹跟踪算法上,南京邮电大学的李长进在目标跟踪方面,用基于颜色直方图和卡尔曼滤波器的方法来对目标车辆进行跟踪[4]。Betser使用“snake”方法为跟踪目标提取车辆的轮廓[5];Magree D使用光流法进行分析[6],这些方法在交通不拥挤且光线良好的情况比较适用。本系统首先通过快速小渡变换提取图像的纹理,同时利用灰度共生矩阵对提取出的纹理进行度量与分析。在此基础上根据图像中各部分的纹理差异检测车辆的存在,并成功剔除阴影的干扰。其次,提出用于图像处理的卡尔曼滤波的状态转移矩阵和观测矩阵,并利用其对车辆的状态进行跟踪,从而达到在图像序列中跟踪车辆运行轨迹的目的。更重要的是,本系统还针对性的采用了分段实时处理算法,使得系统可以根据当前的时间、天气等外界情况,启用不同的算法处理,使得在大雾天、雨雪等恶劣天气下,也会有比较好的检测结果,不同算法的切换可以通过光强探测或天气预测等信息进行自动切换,可以根据实际情况对切换条件进行编辑,其车辆轨迹跟踪算法流程图如图4所示。本文选择现场能见度比较低的场合进行算法研究。
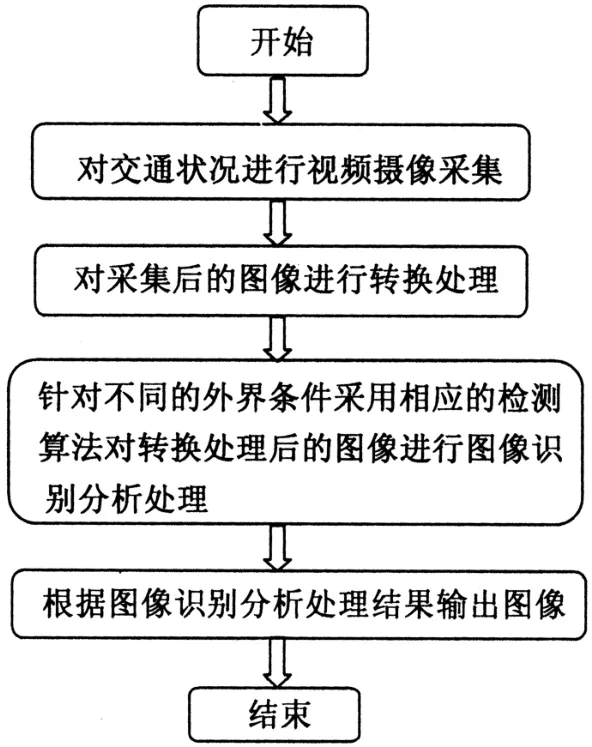
图2 车辆轨迹跟踪算法流程图
当现场能见度比较低的时候,一般车辆会打开车灯,如果目标光源的射束角较小,且适当的发射角度和观测角度不会造成周边背景的反光或者这种反光不被观测摄像机所接收,在这种情况下确定车辆的两个车前大灯即可确定车辆这个目标,车辆的两个车前大灯满足下式条件,即两个车灯连通域的重心基本在同一条水平线上。

式(1)中Ya,Yb——两个临近连通域重心坐标的Y向值;TY——对应的阈值。
连通区域重心的坐标是根据所有属于该区域的点计算出来的,计算公式如式(2)和(3)所示。

式(2)、(3)中S——连通域的面积,表示属于连通域的像素个数。
定义如下:

二值化后的图像中不仅包括车灯还有车灯照摄在地面的反光,同时有的车辆的车灯由于射束角较大,直接照射到摄像机中形成很大的眩光,不能找到大前灯,这时候通过如下的二值化后的连通域特征将地面反光滤除掉。为此定义如下两个形状参数,圆形度F和矩形度K:

式(5)、(6)中,B——灯光连通区域的边界长度;
S——连通区域的面积;
L——连通域外接矩形的宽;
H——外接矩形的高
对于数字图像来说,边界的长度是一种简单的边界全局属性,它是边界所包围区域的轮廓的周长。考虑的连通域是由内部点加边界点构成。该区域的边界是由所有边界点按4方向或8方向连接组成的,区域的其他点成为区域的内部点。如果边界长度是按4连通计算的,则对于正八边形区域F取最小,如果边界长度按8连通计算,则对正菱形取最小。利用这些区域特征,通过选取合适的阈值,可以将不是车灯的灯光干扰恰当地滤除掉。
3 实验结果与分析
本文为选择现场能见度比较低的场合进行实验。通过图像分析提取运动目标,从而可实现下一步的识别和跟踪。图3为本文所设计一体化视频车检器在目标光源的射束角较小情形下所摄图像。在构建背景之后,则可以利用二值化获得的运动目标图像如图4。如图5为车灯照摄在地面的反光、车辆的车灯射束角较大情形下所摄图像,图6为其二值化后而获得的运动目标图像。

图3 运动车辆识别前图像

图4 运动车辆二值化后图像
为进一步验证效果,分别选取4个不同地方,两种设备安装角度进行测试,如图7为夜间高速公路上的车辆检测效果图,其中图7(c)和图7(d)为大雾天的车辆检测效果。实验结果表明,本文所采用及提出的方法可有效达到预期要求。通过应用发现,该算法有广泛的适用性,并且达到较高的检测精度。
从以上算法介绍和实验中,可知这种检测方法需要对图像传感器的原始数据进行处理,有效的消除制式摄像机对原始图像的矫正,更为准确的判断现场情况,合理选择算法参数,提高检测识别的准确率。

图5 运动车辆识别前图像

图6 运动车辆二值化后图像
4 结论
本文提出一体化视频车辆检测的概念,并进行技术研究,采用一体化设计。本文直接将算法软件嵌入到图像处理DSP中,提高了系统反应和处理的速度。
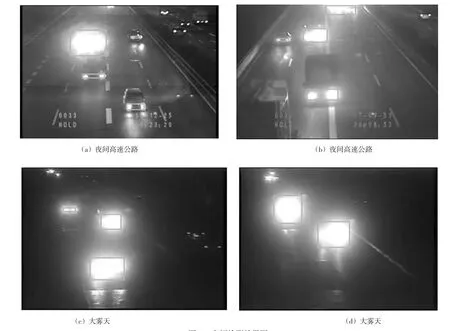
图7 车辆检测效果图
另外,针对图像传感器原始数据进行分析的方法,是更为先进的图像识别算法的内在要求,有效的克服了市售制式摄像机为提升人的感官感受而做的优化处理所带来的判断误区。实验结果表明,本文设计的一体化视频车辆检测系统具有良好的检测效果,能够提取道路背景和车辆信息,实现交通场景中的车辆检测计数,车辆跟踪、车辆定位等功能,为交通流诱导系统提供真实可靠的数据。在减轻交通拥挤、提高行车速度、提高通行效率等方面将会发挥巨大的作用。
[1]李志军,许万里,黄玉兰.基于达芬奇技术的视频监控系统研究[J].吉林大学学报:信息科学版,2011,28(6):626-639.
[2]DAN X,HU W W,Tan T N et al.A multi-object track⁃ing system for surveillance video analysis[A].Proceed⁃ings of IEEE International Conference on Pattern Recogni⁃tion[C],Cambridge,United Kingdom.IEEE,2010:767-770.
[3]Texas Instruments TMS320DM644x DMsoc Video Pro⁃cessing Back End(VPBE)[M].SPRUE37A April 2007:43-115.
[4]李长进.基于达芬奇平台的交通视频检测系统的研究[D].南京:南京邮电大学,2012.
[5]Betser A,Vela P,Tannenbaum A.Automatic tracking of flying vechicles using geodesic and Kalman filtering[A].43rdIEEE Conference on Decision and Control[C].Atlantis,Paradise Island,the Bahamas:IEEE,2010:1649-1655.
[6]Magree D.Tracking multiple vehicles using foreground background and motion models[J].Image and Vision Computing,2009,22(2):143-155.
Research on Vehicle Track Algorithm Based on the Integration of Video Vehicle Detector
HAO Jian-bao1,FENG Yang1,SANG Lin2
(1.Department of Mechanical and Electrical Engineering,Guangdong Communication Polytechnic,Guangzhou 510800,China;2.Shenzhen Xinchuang Zhongtian Technology Development Co.,Ltd,Shenzhen518055,China)
Integrated video vehicle detector based on DaVinci technology,has the advantages of compact structure,lower power,faster than video vehicle detector currently in use.In this paper,TMS320DM6446 chip of TI’s DaVinci platform was used as a core.We analyze major modules of hardware system,building an integration hardware system of vehicle video detection.Finally,we select the relatively low visibility situations to algorithm design and experiment,the experimental results show that,the integration of vehicle video detection has good detection results,which can realize vehicle detection and counting,vehicle tracking,vehicle positioning and other functions in traffic scene,and provide reliable data for traffic flow guidance system.
integration;vehicle video detection;trajectory algorithm
TP274+.5
A
1009-9492(2014)09-0019-04
10.3969/j.issn.1009-9492.2014.09.005
郝建豹,男,1978年生,山东莘县人,硕士,讲师。研究领域:智能交通、自动化、嵌入式系统。已发表论文4篇。 (编辑:阮 毅)
*广东交通职业技术学院科技项目(编号:GG81080131)
2014-03-18
猜你喜欢
商场现代化(2016年26期)2016-11-21
科教导刊·电子版(2016年26期)2016-11-21
艺术科技(2016年9期)2016-11-18
成才之路(2016年25期)2016-10-08
成才之路(2016年25期)2016-10-08
环球时报(2016-07-30)2016-07-30
企业导报(2016年8期)2016-05-31