
汽车LED前照灯弯道控制系统设计探讨
2014-02-16 07:46顾诚甦
电子测试 2014年15期
顾诚甦
(南通农业职业技术学院,江苏南通,226007)
汽车LED前照灯弯道控制系统设计探讨
顾诚甦
(南通农业职业技术学院,江苏南通,226007)
崭新的科技拉近了世界各国之间的距离,在各种交通工具要求速度的同时,我们也看到了安全问题的重要性。本文从用户对汽车智能系统的需求出发,探讨了汽车LED前照灯弯道控制系统的设计原理以及软硬件实现。
弯道;角度;轨迹;电机
0 引言
消费者对于汽车的需求已经不光是行驶动力、内饰舒适,外观漂亮,更多的消费者将目光转移到了汽车的智能系统配置上,如何让行驶更安全、更智能化也是汽车电子系统设计者们追求的目标。本文主要研究的是由单片机ARM S3C2410芯片、传感器MPU-6000型陀螺仪以及23HS2430步进电机阀共同控制的汽车LED前照灯弯道控制系统。
1 汽车LED前照灯弯道控制系统需求设计
恶劣天气与夜间行车都离不开灯光。从交通事故发生率来看,由于受到道路状况的影响以及灯光辐射范围的误差而导致驾驶者对车辆操控失误发生的汽车交通事故约占总交通事故量的20%。近年来汽车智能系统设计技术也考虑到用户对于驾驶安全的高度需求,不断地改良技术,创新产品,特别是汽车前照灯控制与检测技术。由于LED灯能够节约能源,使用寿命长、灯光亮度高,被广泛应用在汽车前照灯的设计之中。这样的研发背景下,特此设计了可以控制弯道灯光转动角度的汽车LED前照灯弯道控制系统。
2 汽车LED前照灯弯道控制系统设计原理与计算
传统的汽车前照灯在汽车行驶在弯道时并不能及时转变照射角度,而是依然发出直线光束,这对于同步运行的车辆已经发生转弯时就非常危险,前照灯光束并不能够随着车辆的位移而进行调整。汽车LED前照灯弯道控制系统是采用了嵌入式模块系统设计理念,是根据最先进的MCU模块结合牛顿力学和三角形公式原理计算和设计的。系统要通过MPU-6000陀螺仪来判断出车辆当前的行驶速度与加速度,MCU智能控制模块接收到这些数据后,再根据三角形的角度公式以及力学原理计算出车辆在弯道行驶途中下一秒的车辆运行轨迹。预测到车辆的运行轨迹后要根据车辆预计行驶轨迹,由MCU发出指令,控制23HS243系列步进电机阀的开关与闭合角度,以调整车辆左右两侧的前照灯的照射角度。系统设计的关键点在于让LED前照灯转动角度与车辆在弯道中的下一秒运行轨迹严密符合,这样才能让驾驶者对路况有较为准确的判断,保障夜间行车安全。设计中要把握如下计算原理:
2.1 弯道曲率半径的计算原理
要想获得车辆左右两侧前照灯适应车辆在弯道行驶的转动角度就必须要知道行驶路过的弯道曲率半径R2。根据力学原理曲率半径的计算公式为R2=(1+KV2)R1,其中,V代表汽车的行驶速度,R1代表在车轮的侧面偏转角度忽略不计的情形下、车辆侧方向的加速度几乎为0,车速趋于极限低且车辆两个前车轮胎的转角保持稳定的前提下的转向半径。K是一个固定值,每一种车辆的这个固定系数都是不变的。而这个公式当中的转向半径R1可以根据弧长与角度公式R1=L/A计算出来。其中L为汽车的轴距,A是方向盘转角换算出来的前车轮转动的角度。由以上两个公式的推导过程,我们可以得到弯道曲率半径R2。
2.2 LED前照车灯转角计算原理
根据多位驾驶者多年驾驶经验来看,驾驶者一旦遇到突发状
况需要有大约2秒钟的时间做出反应并转动调整方向盘角度,那么汽车如果行驶到弯道中我们要判断其下1秒的运行轨迹,我们设定汽车的LED前照车灯要能够保持亮度持续3秒钟。凭借驾驶者的凝视位置由公式:B=VT/2R2就 可以计算出弯道行驶中前照灯需要转动的角度。其中,V为车辆速度可以由陀螺仪测得并告知MCU模块,T为固定时间3秒。
根据曲率半径公式R2=(1+KV2)R1以及角度公式R1=L/A、转角公式B=VT/2R2,得到了最终的LED等需要转动的角度为:3VA/2(1+KV2)L。
3 汽车LED前照灯弯道控制系统设计框架
系统采用子模块框架设计结构,主要包括了车速控制系统、中央控制系统和角度控制系统三大子系统模块。系统设计框架图如图1所示:
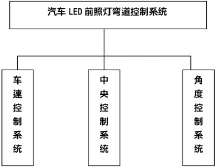
图1 系统框架结构
3.1 车速控制系统
MPU-6000陀螺仪是一种速度传感器,车速控制子系统主要就是由三轴的加速度传感器MPU-6000陀螺仪进行研发设计的。MPU-6000陀螺仪是三轴传感器,通过它的检测,可以知道车辆在弯道上的行驶速度。MPU-6000陀螺仪传感器具有I2C总线与SPI总线结构,极大的方便了与中央处理单元ARM芯片的指令传输和程序编译。其检测精准度高、噪音低功耗小:角速度传感器为±250度/秒、±500度/秒、±1000度/秒以及±2000度/秒,加速度传感器为±2g、±4g、±8g以及±16g。噪音为0.005度/秒/Hz,工作电流不超过5.5mA。
3.2 角度控制系统
角度控制系统主要由23HS243系列步进电机与步进电机驱动器DM860构成。收到中央处理系统的指令后,23HS243系列步进电机能够驱动车辆前照灯进行角度转动。本系统采用23HS2430系列步进电机带通转台转动,其精度控制在1.8+-5%度,并且能够实现快速响应。步进电机驱动器DM860具有几乎零噪音、低速运行平稳等特点,定位精度高,供电电压为24-80V,具有欠压、低压、过载保护功能。
4 汽车LED前照灯弯道控制系统的实现
4.1 硬件设计
整个系统的硬件电路设计包括了LIN和CAN总线电路、传感器传输电路、微控制器电路和步进电机驱动电路等四大部分。
系统电源接通以后,整个系统处于上电状态。这ARM控制器首先要进入到复位程序,步进电机驱动单元也处于复位状态,在LIN总线的帮助下,准备随时接收微处理器发出的控制指令。LIN总线可以与MCU模块的SCI串口连接,是可以实现汽车分布式电子控制的串行通信方式。LIN总线传输和接收数据的格式要由报文头、帧响应空间和响应字节三部分共同组成。报文头一般由同步间隔场、同步场和标志场构成,帧响应空间一般是3-9个字节场,数据信息(一般为2、4或者8个字节)以及最后一位的校验和构成。CAN总线则负责控制汽车内部系统与检测系统间的局域网通信。起始帧、答应场、仲裁场、控制场和数据场以及循环冗余检查位共同构成了CAN总线的报文。传感器控制电路中主要是MPU-6000陀螺仪传感器上电复位后就可以对车速随时进行采集并将采集到的数据随时传递给MCU模块。中央控制电路主要是通过ARM S3C2410芯片上电后的I2C总线接收数据,通过E2PROM模块对数据进行存储,通过A/D转换实现对数据精度的转换。
4.2 软件设计
本研究系统为方便以后程序编译修改与系统升级,采用了模块化的设计思想,即采用由多个子程序构成主程序函数的方式进行程序编写,方便程序以后进行函数调用、方便系统维护,也便于产品的规格延展和产品的变形,使得一次产品开发设计,得到几种相关产品及型号的拓展,便于生产的组织和产品的销售。系统软件的程序设计思路为:系统上电后先进行复位与初始化程序的编写,包括ARM芯片的各个端口与各个传感器、步进电机等器件接线端口的初始化。这时候MCU6000传感器处于工作状态,要对车辆的行驶速度随时进行采集,采集到的数据传输给ARM芯片,通过MCU模块的运算后将LED灯需要转动的角度数据传输给步进电机,并发送让步进电机转动的程序指令,通过MCU的控制信号精确调整LED前照灯的照射角度。在ARMS3C2410控制代码程序编写时要使用一些固定头文件,例如#include“2410addr. h”、#include“2410lib.h”等。
5 结语
汽车LED前照灯弯道控制系统设计成功得益于软硬件的良好设计。汽车电子与自动化技术还在不断的迎风破浪,继续远航,但无论科技发展到什么高超的地步,我们都不能忽视行驶安全。在以后的汽车灯光控制系统设计中我们还要加强对系统安全的精准设计。
[1] 罗峰.汽车CAN总线系统原理、设计与应用[M].电子工业出版社.2010:71
[2] 宋朋朋.汽车前照灯智能控制系统的研究[D].南京林业大学.2012:8-9
Automotive LED headlamps corner control system design
Gu Chengsu
(Nantong Agricultural College,Jiangsu,Nantong,226007)
New technology shortens the distance between the countries in the world,in various transportation requires speed at the same time, we also see the importance of security issues.This article embarks from the user demand for auto intelligent system,this paper discusses the design of the control system of automobile LED headlamps corner principle and the hardware and software implementation.
Curves;Angle;Trajectory;The motor
猜你喜欢
作文小学高年级(2022年3期)2022-04-20
福建中学数学(2018年1期)2018-11-29
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
汽车维护与修理(2018年7期)2018-10-13
电子制作(2018年11期)2018-08-04
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
汽车维护与修理(2016年4期)2016-11-26
空间控制技术与应用(2015年2期)2015-06-05
