压缩感知联合稀疏孔径自聚焦的多站无源雷达成像
2014-02-21 11:47苏卫民
应用科学学报 2014年2期
吴 昊, 苏卫民, 顾 红
南京理工大学电子工程与光电技术学院,南京210094
无源雷达成像虽然存在诸多不利于目标成像的因素,如外辐射源的波长远长于传统雷达,且外辐射源信号的带宽较窄,但具有良好的隐蔽性、抗干扰性和低成本等优点[1],故成为新的研究方向.
针对外辐射源成像,文献[2]提出了直接傅里叶重构法(direct Fourier reconstruction,DFR),首先将波束域中已经分离的来源于不同外辐射源的回波数据插值到标准网格,然后直接利用二维FFT算法获得目标的图像.文献[3]提出了子孔径综合无源雷达成像算法,通过将多个外辐射源合成孔径等效为大孔径来对目标成像,具有较快的处理性能.文献[4]探讨了基于二元假设检验的成像方法,获得了较好的成像效果.这些研究均要求获得良好的方位覆盖,如增大目标转角,或增加外辐射源数目,然而在稀疏构造下会使目标重构失败,于是需要寻求适用于站点数目较少环境下的成像方法.
压缩感知理论[5-6]表明:如果信号在某个域中是可以稀疏表示的,那么只要利用少量数据,通过求解最优化问题即可重构获得原始数据.文献[7]将压缩感知应用于无源雷达成像,在高信噪比环境下,即使外辐射源数较少,也可以获得理想的成像效果.然而,该算法的前提是不存在相位误差,而实际情况是不准确的参数将导致目标成像的退化,如电视站到成像场景的距离差、大气因素的影响等,这就需要自聚焦算法对相位误差进行校正[8].
经典的自聚焦算法为相位梯度自聚焦(phase gradient autofocus,PGA)算法[9]和最小熵(minimum entropy autofocus,MEA)算法[10].这些算法的前提是相位误差仅在方位向可变,而在方向相同的情况下,不同距离维上的相位误差仍然相等.对于多发单收无源雷达成像系统,发射站位于不同方向,且各站点的发射频率不同,所以它是一个二维自聚焦问题.文献[8]提出了一种无源雷达成像自聚焦算法,将相位误差问题转化为距离误差问题,并选择MEA对相位误差进行校正,但该算法针对的是波束域充分覆盖环境,并不适用于稀疏站点构造环境.文献[11]将自聚焦算法应用于压缩感知成像,先在孔径稀疏化前进行自聚焦处理以完成相位校正(也就是预处理阶段),再将孔径稀疏化并完成压缩感知成像.而无源雷达成像在层析重构中利用发射信号经过旋转目标上一散射点反射至观测站的信号,它在波束域上表现为分散的小弧度[3],即孔径本身就是稀疏的,故文献[11]中的算法并不适用于本文所讨论的问题.
本文将压缩感知用于无源雷达成像,同时考虑相位误差对成像性能的影响,提出了基于压缩感知联合稀疏孔径自聚焦的无源雷达成像算法.为区别于文献[7],本文算法在重构图像的过程中同时构造关于相位误差增量的最优化问题.该算法是一种迭代算法,在每次迭代中包含两个步骤:
步骤1 应用压缩感知理论,以lp范数法求解最优化问题来重构本次迭代的图像;
步骤2 构造关于相位误差增量的最优化问题,并结合步骤1求得图像,利用准牛顿法获得误差增量估计,并更新稀疏传感矩阵.
1 多基地无源雷达成像模型
以图像中心为原点,x正半轴为零轴,逆时针方向为正方向,建立如图1所示的坐标系.Si为电视台i的位置,电视台位置在极坐标下可表示为(r1,β1),···,(ri,βi),···,(rm,βm),其载频为f1,···,fi,···,fm,对应波长为λ1,···,λi,···,λm.观测站位于x正半轴,它到原点的距离为r0.点P为图像的某个散射点,它在极坐标下记为(r,φ).当目标旋转θ时,x轴和y轴也跟着目标一起旋转,如图1虚线的对应坐标轴.则散射点P转移到P′,它与旋转后的坐标位置关系不变,而对于原坐标的位置用极坐标表示为(r,φ′),其中φ′=φ+θ.
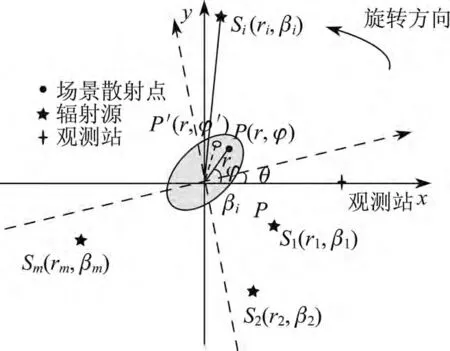
图1 多站无源雷达成像几何配置Figur e 1 Geometry of multistic passive radar imaging
系统中观测站有两路通道,参考天线通道接收直达波,主天线回波信号接收回波信号.假设参考通道能够理想地分辨不同方向的外辐射源信号.由于不同外辐射源信号之间的载频之差大于信号的带宽,于是可用带通滤波器将来自不同外辐射源经目标反射的回波分辨出来.设第i个发射站发射信号的载波分量为

式中,fi为载波频率,φi为初相,A为幅度,则外辐射源Si信号经点P反射至观测站的回波为
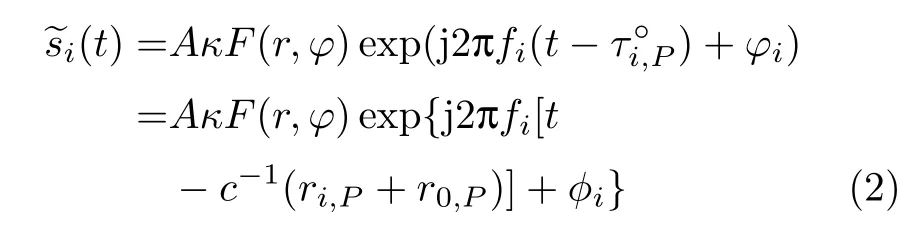
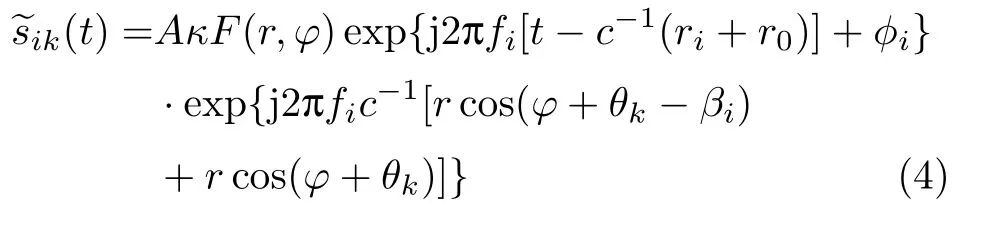
由于r≪r0,r≪ri,可以进行如下近似:r0,P=r0-r cos(φ+θk),ri,P=ri-r cos(φ+θk-βi).将ri,P和r0,P代入式(2),则接收到来自第i个外辐射源信号在目标旋转θk时经散射点P的反射回波为

将式(3)变形,即提取出与r0、ri以及初始相位角φi有关的固定项可得
将式(4)去除载波,即去除式(4)中与r0、ri有关的固定项得

对于整个图像的回波数据是图1所示灰色部分第i个电视台发射信号经过所有散射点反射到观测站的去载波数据总和
式中,Z表示成像场景范围,F为场景的散射函数,可以记为N×M维的矩阵.利用极坐标与直角坐标系的转换关系x=r cosφ,y=r sinφ,并令θik=θk-βi/2,γi=λisec(βi/2),可将式(6)修改为

令fx=2,fy=2sinθik/γi,则式(7)可写为
式中

定义(fx,fy)为波束域直角坐标系,对应于二维目标场景坐标系(x,y).式(8)表明观测站接收到的未受相位误差干扰的观测数据与散射强度是傅里叶对的关系.式(9)是一个以(0,0)为圆心,2/γi为半径的圆,不同的外辐射源在波束域形成不同的半径谱环,且回波数据仅投影在第i个外辐射源所对应的从βi/2到(βi/2)+θmax的圆弧上[3],而圆周上其他位置未知.当目标不能以大转角观测或者外辐射源数目较少时,对应每个外辐射源的子孔径是断开的,如目标的转角θmax小于相邻站点的角度差.图2为多电视站信号在波束域上的分布示意图.
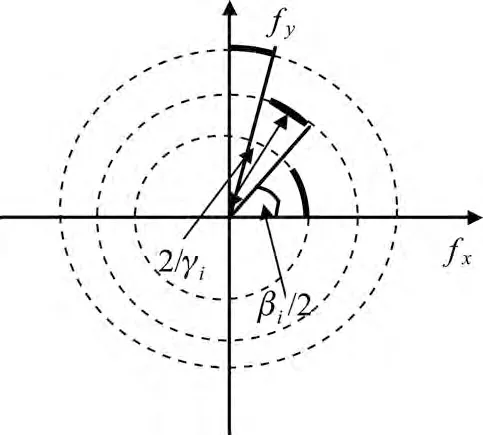
图2 波束域数据投影示意图Figure 2 Beam space coverage of the data

式中,ψik表示在第k次采样中对应于第i个外辐射源Si的信号畸变所带来的方位向偏差.
2 压缩感知联合稀疏孔径自聚焦成像算法
2.1 压缩感知理论
雷达目标成像过程可看作目标场景与点扩散函数的卷积过程,其离散化模型可表征为

式中,g为实测图像向量,包含了相位误差引起的偏移.f为目标场景向量,w为附加的雷达系统噪声,T为传感矩阵.分别将G和F展开为列向量

为了描述如式(12)所给的观测模型,定义相位误差向量

并构造对角矩阵

式中,diag{·}代表对角阵,其中对角元素上的值由括号内的向量构成.因此,式(12)中的参数与理想状态(无相位误差)的关系为

式中,~g表示理想观测数据~G构成的向量.记~T为理想稀疏传感矩阵,则受相位干扰观测数据的稀疏传感矩阵

Donoho提出,如果长度为L的信号f是k稀疏(k≪L)的,则利用一个Q×L传感矩阵T得到的量测向量g中就包含了f的全部信息(Q=ml,L=MN)[5].由于强散射点的幅度大,而背景散射幅度小,且幅度大的散射点在场景中占的比例较小,因此图像本身具有稀疏特性.同时由于图像对应的不同场景无规律,则对应的稀疏基f也没有规律,这就保证了它与传感矩阵无相关性,即满足有限等距条件(restricted isometry property,RIP)

应用压缩感知理论,利用量测g和目标先验信息赋予约束项来估计f,可描述为

2.2 算法描述
压缩感知理论的核心是构造合理的传感矩阵,并选择合适的重构算法快速重构稀疏信号.分析式(18)中理想稀疏传感矩阵~T的物理意义:通过傅里叶变换可将回波数据投影到波束域(fx,fy),并指定这些投影数据为算法输入量g.本文选择式(21)的目标旋转不同角度的点扩散函数建立理想传感矩阵~T的列向量
式中,i为第i个外辐射源,θmax为目标的最大旋转角.
图3给出了点扩散函数(point spread function,PSF)三维图.理想的点扩散函数为单频辐射对点目标做360度全角度聚焦,这时会形成一个理想的主峰(见图3(a)).当旋转角逐渐变小时,距离向分辨和方位向分辨将逐渐区分(见图3(b)),这也是雷达成像需要大宽带信号的原因,因此对于外辐射源成像,需要不同发射频率的外辐射源来获得更好的波束域覆盖,换取压低旁瓣的效果(见图3(c)).当站点数较少时,即如图2子孔径无法构成一个连续的合成大孔径一样,利用传统途径无法获得理想的成像分辨率(见图3(d)),因此需要寻求超分辨成像方法.
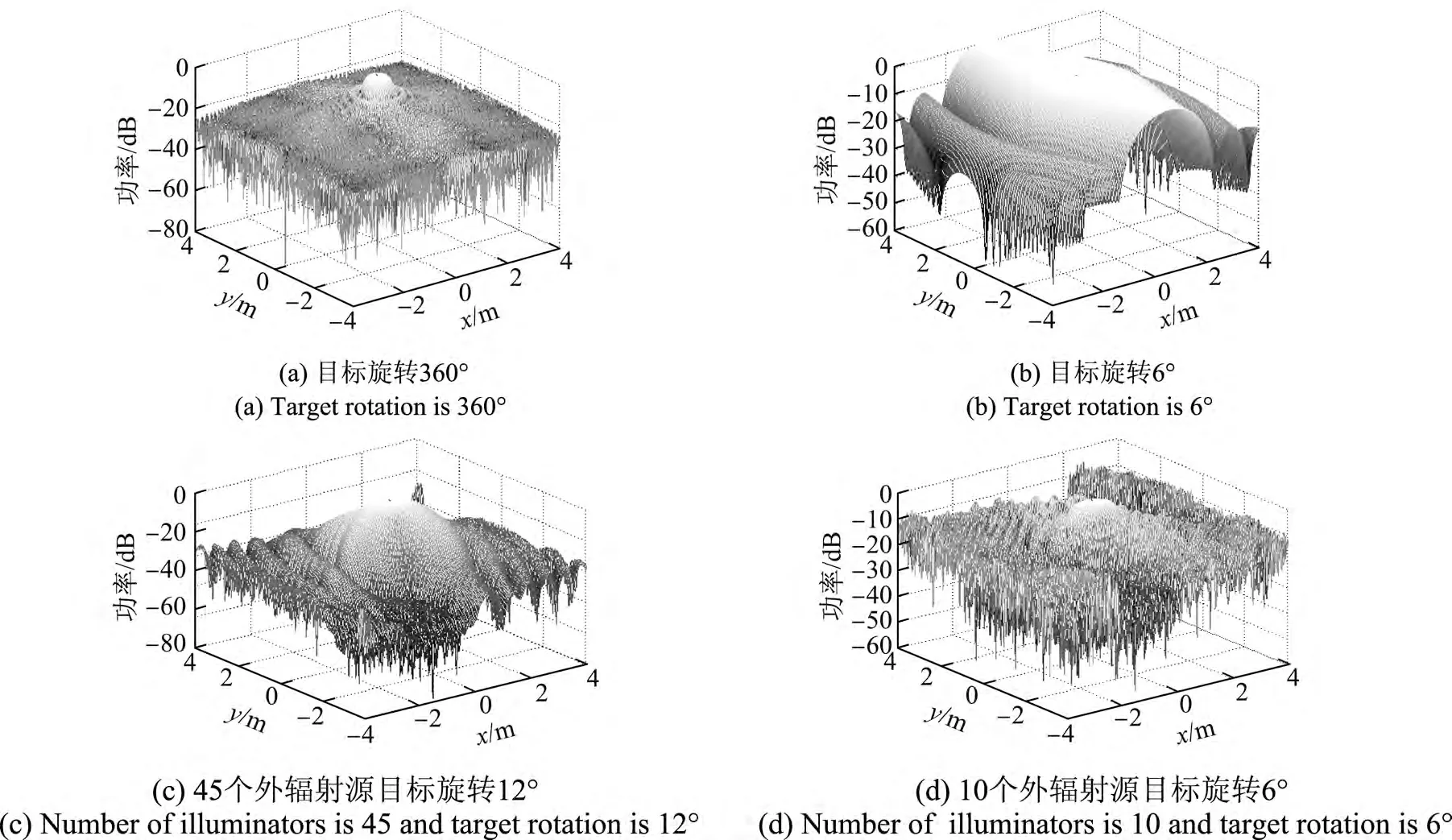
图3 点扩散函数三维图Figure 3 Point spread function
重构方法主要有两种.一种为贪婪方法,具有相对较小的计算量.由于不同外辐射源信号的发射频率不同,不同外辐射源下的PSF构成~T的列向量相关性较弱,而对应同个外辐射源的PSF构成列向量~T的相关性较强,这与贪婪算法要求传感矩阵~T中各个列相关性的条件不吻合.另一种为凸优化方法,如lp范数法,虽然计算复杂度较高,但能避免上述限制.
传统的压缩感知理论并没有考虑相位误差问题.多发单收无源雷达成像系统的发射站位于不同方向,且各站点的发射频率不同,故相位误差校正是一个二维自聚焦问题.考虑目标转角较小,单个辐射源信号在波束域中仅分布在很小弧度的圆弧上,因此在传统的压缩感知基础上要考虑相位误差对成像性能的影响.
文献[8]提出了一种基于MEA的无源雷达成像自聚焦算法,首先将波束域中非均匀分布的数据插值到均匀网格中,然后根据MEA算法进行预处理获得对应于已插值均匀网格数据的等效相位误差,并由式(8)及二维FFT获得场景成像.该算法要求波束域中数据较多,当目标不能以大转角观测且发射站较少时,波束域中的有效数据相对散开,若仅选择密集数据插值,则无法获得理想的成像结果.同时选用压缩感知算法时,目标场景向量f的长度大于波束域中数据构成向量g的长度,因此单纯利用缺失数据预处理无法满足图像能量守恒.
文献[10]中的算法是在预处理阶段构造关于相位误差最优化问题,进而完成相位校正.区别于该算法,本文算法是在重构图像的过程中估计相位误差增量.首先利用lp范数法重构图像,然后在这个重构图像基础上构造关于相位误差的最优化问题,进而求得相位误差增量估计.
将式(20)表示的带约束优化问题转换为无约束优化问题可得[12-13]
式中,λ为正则化参数.式(22)中的第1项反映了数据的拟合度,第2项记录了散射强度构成列向量和重构区域的先验信息,并利用这些先验信息来压低旁瓣,从而保留了强散射点.实际上,取0<p≤1有助于保护更小数目的主要散射点及其幅度,本文算法选择p=1.
步骤1 利用lp范数法求解关于式(22)的最优化问题:为保证约束项在|fi|=0处的可导性,根据式(23)进行平滑近似
式中,ε为较小正整数,则式(22)可写为
对式(24)关于f(n)求偏导,得到梯度函数

其中
最后在式(25)的基础上,利用准牛顿法建立迭代算法

式中,n代表迭代的次数.
步骤2 估计相位误差增量.由步聚1获得的估计图像f(n+1)建立关于相位误差增量Ωa的目标函数

式中

结合准牛顿迭代法得

由式(33)求得第a个相位误差的增量估计,直到每个观测值的相位误差增量都计算完毕.稀疏传感矩阵T可以由式(34)获得更新,然后在下次迭代时返回算法的步骤1

式中

当满足

时,停止迭代,其中δ为门限.实验结果表明,初值f(0)的选取对算法的性能影响较小.
综上所述,本文算法的具体流程如下:
步骤1 根据式(28)更新f(n).
end
步骤3 根据式(35)将相位误差增量转换为对角矩阵D.
步骤4 根据式(34)对传感矩阵T(n)进行迭代.
步骤5 如果满足式(36),则将最后迭代获得的估计向量^f转化成N×M维矩阵^F,算法终止;否则返回步骤1,重复进行迭代.
3 算法仿真和性能分析
本文对基于多个外辐射源和单个观测站条件下的无源雷达成像系统进行仿真实验.图4给出了成像场景,接收数据被投影到图2所示的圆弧上,
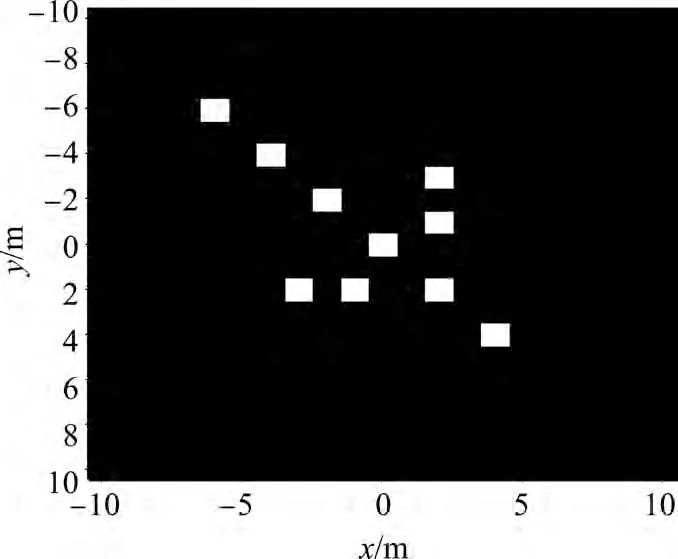
图4 成像场景Figure 4 Distribution of the target
假设有45个电视台,分布在-216°~16°范围内,每个电视台发射信号的载波频率范围为450~550 MHz,目标每旋转1°采样一次数据.目标转角为12°,并采用子孔径综合无源雷达成像算法,其成像效果如图5(a)所示.为了获得更理想的效果,应在图5(a)基础上加个门限,本文将门限取为0.7,得到加门限后的成像结果见图5(b).
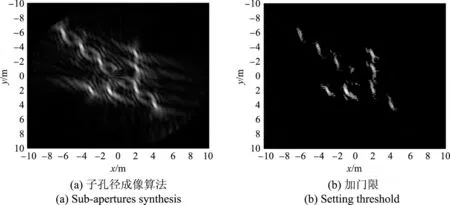
图5 利用文献[3]算法的成像结果(假设无相位误差)Figur e 5 Simulated using subapertures synthesis method in reference[3]without phase error
将电视台数降为10个,旋转角度降到6°,应用压缩感知成像算法,可得到接收数据经过相应处理后重建的目标散射强度图,如图6所示,这说明在旋转角度较小的情况下利用压缩感知成像算法可以比采用子孔径综合无源雷达成像算法得到更好的恢复目标上的强散射点.
考虑相位误差,由于无法获得与受干扰观测数据所对应稀疏传感矩阵,且在小转角情况下表现为稀疏孔径,因此直接应用压缩感知理论重建目标散射强度图无法获得理想强散射点.假设相位误差均匀分布在(–π/2,π/2)区间,采用压缩感知算法的成像结果见图7.
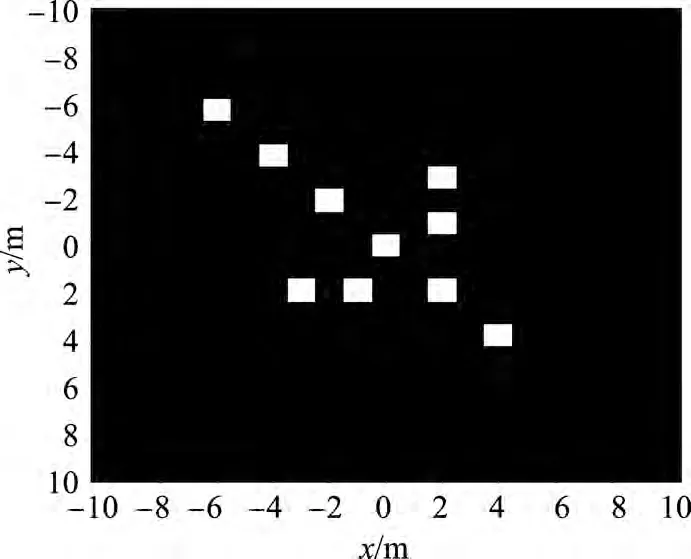
图6 利用文献[7]算法的成像结果(假设无相位误差)Figure 6 Simulated using compressed sensing method in reference[7]without phase error
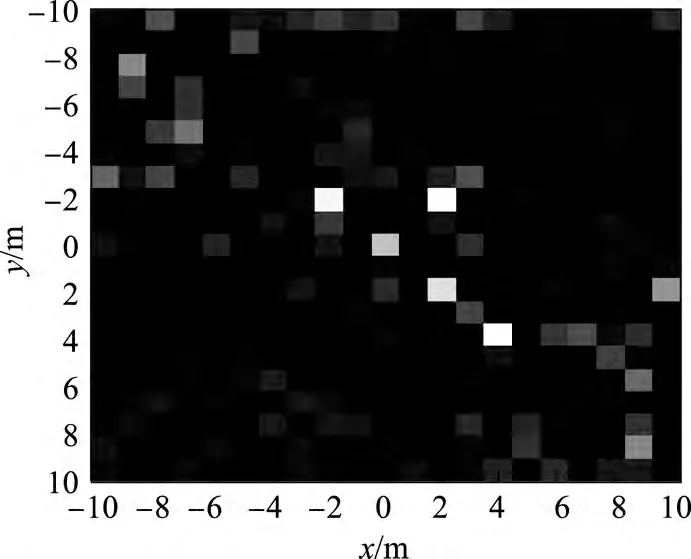
图7 利用文献[7]算法的成像结果(假设存在相位误差)Figure 7 Simulated using compressed sensing method in reference[7]with phase error
本文方法能够有效估计观测数据中的相位误差,并获得与受到相位干扰观测数据对应的稀疏传感矩阵.图8为本文算法的成像结果,可见各强散射点在受到相位误差干扰的情况下也能分辨出来.

图8 利用本文算法的成像结果(假设存在相位误差)Figure 8 Simulated using compressed sensing joint sparse aperture autofocus method with phase error
图9给出了不同站点下相位误差均匀分布在(-ψmax,ψmax)时的图像估计误差随ψmax的变化曲线,其中ψmax为相位误差上限.可见站点数目越多,算法对相位误差的校正越有效,这是因为在站点数目稀少且目标转角较小的情况下,波束域上的有效数据越少.如果相位误差过大,在算法迭代过程中会搜索到错误的强散射点.随着站点数的增多或者目标旋转角的增大,波束域中的有效数据就越多,即使在较大的相位误差下也可以获得较正确的场景图像估计.图10给出了图像估计误差有效收敛情况下本文算法的迭代次数,可以看出:在相同发射站数情况下,相位误差越小,算法越快收敛,即迭代次数越少;在相同相位误差干扰环境下,站点数越多,迭代次数越少.
图9 图像估计误差随相位误差上限的变化曲线Figure 9 Convergence curve of the image estimate error with the phase error bound
图10 算法迭代次数随相位误差上限的变换曲线Figure 10 Convergence curve of the iterations number with the phase error bound
4 结语
基于压缩感知联合稀疏孔径自聚焦的无源雷达成像算法是在图像可稀疏表示下通过建立关于相位误差增量的最优化问题,利用准牛顿法估计误差增量更新实际稀疏传感矩阵.同时根据压缩感知理论,选择不同方位的发射信号目标累积转角对应点扩散函数构造理想传感矩阵,并利用lp范数法得到场景中各散射点的散射强度.与子孔径综合成像方法相比,基于压缩感知联合稀疏孔径自聚焦的无源雷达成像算法能够有效的校正相位误差,同时在电视台数目较少时能对小转角目标进行成像,且其可行性得到了仿真证明.
[1]杨博,王丰华,周一宇,黄知涛.空基辐射源非合作探测系统目标定位[J].应用科学学报,2010,28(3):246-253.
YANG Bo,WANG Fenghua,ZHOU Yiyu,HUANG Zhitao.Location of space-based emitter in noncooperative monitoring system[J].Journal of Applied Sciences,2010,28(3):246-253.(in Chinese)
[2]WUY,MUNSOND C.Multistatic synthetic aperture imaging of aircraft using ref lected television signals[C]//Orlando,FL,United States,IEEE International Conference on Image Processing,2001:1-12.
[3]张馨文,王俊.基于多电视台子孔径综合的无源雷达成像算法[J].电子与信息学报,2007,29(3):528-531.
ZHANG Xinwen,WANG Jun.Passive radar imaging algorithm based on sub-apertures synthesis of multiple television stations[J].Journal of Electronics&Information Technology,2007,29(3):528-531.(in Chinese)
[4]WANG L,YARMAN C E,YAZICI B.Dopplerhitchhiker:a novel passive synthetic aperture radar using ultranarrowband sources of opportunity[J].IEEE Transactions on Geoscience and Remote Sensing,2011:3521-3537.
[5]DONOHO D L.Compressed sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[6]王妮娜,桂冠,张治,唐恬.基于压缩感知的MIMO系统稀疏信道估计[J].应用科学学报,2011,29(4):347-352.
WANG Nina,GUI Guan,ZHANG Zhi,TANG Tian.Compressed sensing based sparse channel estimation in MIMO systems[J].Journal of Applied Sciences,2011,29(4):347-352.(in chinese)
[7]吴昊,苏卫民,陈刚,顾红.基于压缩感知的多基地无源雷达成像算法[J].宇航学报,2012(10):1681-1689.
WU Hao,SU Weimin,CHEN Gang,GU Hong.Passive multistatic radar imaging algorithm based on compressed sensing[J].Journal of Astronautics,2012(10):1681-1689.(in Chinese)
[8]LIU K,M UNSON D C.Autofocus in multistatic passive SAR imaging[C]//Las Vegas,NV,IEEE International Conference on Acoustics,Speech and Signal Processing,2008:1277-1280.
[9]WAHL D E,EICHEL P H,GHIGLIAD C,JAKOwATZ C V.Phase gradient autofocus-a robust tool for high resolution SAR phase correction[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(3):827-835.
[10]XI L,GUOSUI L,NI J.Autofocusing of ISAR images based on entropy minimization[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(4):1240-1252.
[11]TIAN J,SUN J,HAN X,ZHANG B.Motion compensation for compressive sensing SAR imaging with autofocus[C]//Piscataway,NJ,USA:IEEE,2011:1564-1567.
[12]SAMADI S,CETIN M,M ASNADI-SHIRAZI M A.Sparse representation-based synthetic apertureradar imaging[J].IET Radar,Sonar and Navigation,2011,5(2):182-193.
[13]POTTER L C,ERTIN E,PARKER J T,CETIN M.Sparsity and compressed sensing in radar imaging[J].Proceedings of the IEEE,2010,98(6):1006-1020.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
北京航空航天大学学报(2020年10期)2020-11-14
舰船科学技术(2020年3期)2020-04-22
电子制作(2019年12期)2019-07-16
通信技术(2019年3期)2019-05-31
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年6期)2017-11-23
雷达学报(2017年1期)2017-05-17
互联网天地(2016年2期)2016-05-04