
变结构球形机器人系统设计
2014-02-22 02:43孙章军颜景龙李玉珏李桂斌
电子测试 2014年22期
孙章军,颜景龙,,李玉珏,李桂斌,邸 超
(1.北京理工大学机电学院,北京100081;2.中国兵器工业导航与控制技术研究所,北京,100089)
变结构球形机器人系统设计
孙章军1,颜景龙1,2,李玉珏2,李桂斌2,邸 超2
(1.北京理工大学机电学院,北京100081;2.中国兵器工业导航与控制技术研究所,北京,100089)
本文针对一种具有球态、涡扇轮态和轮态三种基本运动形态的变结构机器人进行了系统研究,从机器人机构原理、信息感知、控制系统三个方面进行了深入分析,研制了一种具备自主侦察能力的变结构球形机器人模型,并给出了基于该模型机器人的实验分析。实验表明:该机器人系统方案可行,机器人具有防护性好,机动性好等特点,并有一定的侦察能力,适用于机密侦察及军用监控领域。
变结构机器人;侦察;控制系统
0 引言
机密侦察和监控在军用和公共安全等领域得到了越来越广泛的应用,这使得微小型自主移动机器人成为研究热点。罗自容等设计了一种可抛掷多运动态机器人。周伟等设计了一种带有2个自由度手臂的小型两轮机器人。美国明尼苏达大学的Hougen D.F.等研制了一系列用于侦察的“Scout”机器人。上述应用环境中,需要机器人秘密进入并隐藏在危险或空间受限场所,把侦察信息传输到监控后台。变结构球形机器人具备重量轻、体积小、能耗低、实时性好、能适应复杂地形环境等特点,是解决前述需求的典型方案。鉴于此,本文提出一种变结构球形机器人系统方案,机器人系统由移动平台、人机交互系统、机器人车载控制系统和传感检测系统四大部分组成。
1 机器人结构
1.1 移动平台工作原理
机器人移动平台由变形组合轮、平衡轮、轮驱动机构、运动态转换机构组成,通过运动转换机构、平衡轮实现运动方式的转换,呈现球态、涡扇轮态和轮态三种基本运动状态,能够适应复杂的地形,机器人的三维模型如图1所示。
当机器人呈球态时,球壳对内部零件起到防护作用,可以通过抛掷等方式布置到目标探测区域。当机器人呈涡扇轮态时,相对于球形运动态可以提供更大的驱动力,可以实现机器人的全向运动和转向,机器人内部的探测装置(如视频、测距传感器等)显露出来完成探测任务。当机器人呈轮态时,两个轮之间的间距变大,增加了机器人的运动稳定性。
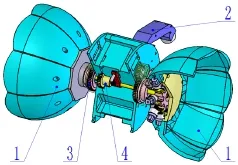
图1 变结构球形机器人3D模型
1.2 机器人静力学分析
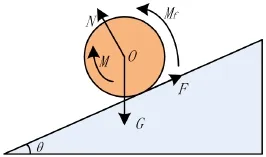
图2 机器人爬坡受力分析
根据静力学平衡条件,可得如下平衡方程:

其中:
F:地面对轮的切向反作用力;
m:机器人总质量为2.5Kg;
N:地面对轮的法向反作用力;
M:作用于轮的驱动力矩;
R:机器人轮子半径,80mm;
公式(1)可以简化为:

依据上述计算,可以确定驱动电机和变形电机的型号,在本方案中两种电机均采用Faulhaber直流电机(型号为2232U012SR)和配套的编码器(型号为IE2-512)。
2 机器人控制系统功能要求
首先机器人的体积小,要求控制系统尺寸小、重量轻、功耗低,能集成在机器人本体内。其次,机器人在未知环境下要实时采集信息、处理以及避障等动作的规划与处理,要求控制系统的实时性好。根据机器人系统的工作要求,对机器人控制系统的总体要求如下:
⑴ 接受上位机的指令实现机器人的运动;
⑵ 实现机器人的运动模式的切换;
⑶ 具有多媒体影音反馈功能;
⑷ 控制系统小型化、轻量化、柔性化;
⑸ 具有独立探测能力,即具有自主功能;
⑹ 具有感知自身状态和环境的传感系统。
3 机器人控制系统设计
机器人控制系统由人机交互系统和机器人车载控制系统构成,机器人控制系统结构如图3所示。
3.1 人机交互系统
人机交互系统采用一个笔记本电脑作为控制终端,人机界面采用LabView设计,该界面可以实现侦察视频显示,运动方式指令控制、运动态模式指令控制、机器人状态显示等功能。操作人员可以方便地使用键盘和鼠标对机器人进行控制。
笔记本电脑采用USB转串口连接Zigbee模块和USB数据采集卡连接音视频接收器分别同机器人进行数据通信和音视频传输。Zigbee模块通过USB与控制程序进行数据交换,将控制程序发出的控制指令用无线信号发送出去,并将接收到的答复信息传递给控制程序。音视频接收器主要完成音视频侦察信号的接收,经过一个USB音视频采集卡把接收到的音视频信息在计算机上处理和显示。
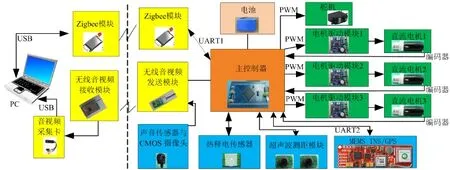
图3 机器人控制系统结构图
3.2 机器人车载控制系统
车载控制系统采用ARM以及遥控/自主的控制方式,包括主控制器、驱动系统、通信系统、感知系统、电源等,控制对象包括3个直流电机和1个伺服舵机:一个电机用于运动转换机构、另两个电机用于2个轮驱动机构, 伺服舵机用于平衡腿的伸展运动。
3.2.1 主控制器
受机器人的体积限制,本文以STM32处理器作为机器人主控制器的主芯片。主要任务包括:通过串口利用Zigbee模块接收操作指令同时回传机器人状态信息;检测运动转换机构的位置信息;根据操作指令和机构位置产生PWM波控制相应的电机动作;根据操作指令产生平衡腿舵机所需的控制信号;通过感知系统获取外部信息;电源电压检测,并在过低或异常时控制保护电路动作。
3.2.2 驱动系统
在直流电机驱动方面,为便于电机调速并提高驱动效率,采用PWM+H桥方式驱动,可以方便地实现电机的启停、调速、正反转。把STM32的通用定时器TM2-4配置成编码器接口模式,获取三个电机的位置和速度信息。利用STM32的高级定时器TIM产生四路PWM来控制电机驱动器,通过改变定时器的比较寄存器值改变占空比,最终改变电机转速。
3.2.3 无线通信系统
主控制器通过串口连接Zigbee模块同上位机进行数据通信,接收上位机发送来的控制指令进行相应的操作,并将机器人的状态信息发送出去。
机器人通过声音传感器和CMOS摄像头所侦察到的音视频信息,通过音视频发送模块把采集的音视频信息通过无线发送出去。为了节约能源,主控制器根据上位机的要求控制音视频部分的工作与否。
3.2.4 传感器系统
机器人为了实现自主导航,不仅需要知道自身的位置、姿态、速度以及系统内部的状态,还需要能够感知周围的工作环境。机器人上安装了4种传感器模块,共有2个超声波测距传感器、1个热释电传感器、1个INS/GPS和1个声音传感器和CMOS摄像头。其中,两个超声波测距传感器位于车体正前方两侧;热释电传感器安装在车体正前方;INS/GPS安装于车体的中心,x轴指向车体的正前方;声音传感器和摄像头位于车体前方。
4 实验
基于以上分析与设计,研制的变结构球形机器人原理样机及其实现的运动形态如图4所示。机器人重2.5kg,机器人横向长度180mm,轮的半径为80mm,遥控半径在空旷的地方可以达到400米。
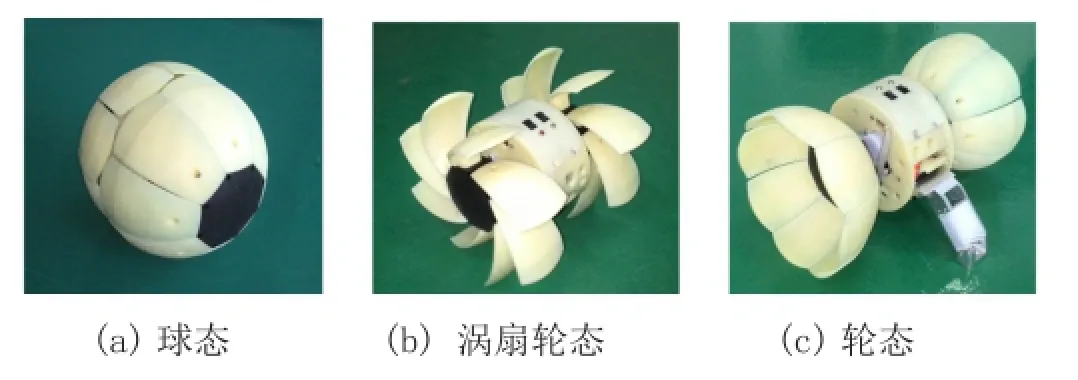
图4 变结构机器人样机
针对变结构球形机器人的特点,测试其运动态转换性能、移动性能。
(1)运动态变换实验:机器人在普通水泥地面、粗糙路面和低草丛地面可顺利实现在三种运动态之间变换。
(2)机器人移动性能实验:机器人呈球态时可以原地360°转向;当机器人呈涡扇轮态时,由于轮为非完整的圆形,运动时有跳动;当机器人呈轮态时,机器人运动平稳,图像清晰。在机器人的人体检测、避障等自主行为的实验中,机器人能够及时避开障碍物。
5 结论
文中提出了一种具有球态、涡扇轮态和轮态三种基本运动形态的变结构球形机器人,并研制样机验证了设计方案的可行性。在工作环境下对机器人进行了运动态变换实验和机器人移动性能实验,实验表明该机器人具有投放方便、防护性好和运动灵活的特点;通过合理配置不同传感器,该机器人可以具有较好的自主侦察能力。
[1] 罗自荣,尚建忠,丛楠,等.可抛掷多运动态球形机器人移动机构[J].机械设计,2009,26(9):30-33.
[2] 周伟,石为人,李江波,等.MSTRbot:一种小型侦察机器人[J].机器人,2011,33(5):592-598.
[3] Hougen D F,Benjaafar S, Bonney J C, et a1. A miniature robotic system for reconnaissance and surveillance[C]//Proc of IEEE Int'l Conf on Robotics and Automation. Piscataway, NJ,USA: IEEE, (2000): p501-507.
[4] Sun Z J,Yan J L, LI C Q,et al.Design and Simulation of a Variable Structure Mobile Robot[J].Applied Mechanics and Materials,2014(457-458):672-676.
孙章军,北京理工大学机电学院博士研究生,主要研究方向为传感与机电控制技术。
Design of a Variable Structure Spherical Robot
Sun Zhangjun1,Yan Jinglong1,2,Li Yuyu2,Li Guibin2,Di Chao2
(1.School of Mechatronical Engineering,Beijing Institute of Technology,Beijing,100081 2.North Navigation Technology Group Co.,LTD,Beijing,100089)
A variable structure spherical robot with three kinds of basic states:global,turbofan and wheel is developed.Through detailed analysis of the principle of mechanism,information awareness and control system of the robot,the variable structure spherical robot is designed.A series of experiments yield to the proposed scheme of robot with self-protection,good mobility and autonomous reconnaissance capability, which is suitable for secret reconnaissance and military monitoring field.
variable structure robot;reconnaissance;control system
猜你喜欢
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
汽车零部件(2021年4期)2021-04-29
防爆电机(2021年1期)2021-03-29
家庭影院技术(2019年7期)2019-08-27
电子制作(2018年12期)2018-08-01
中国交通信息化(2017年2期)2017-06-06
能源(2016年2期)2016-12-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
