
独立驱动电动汽车机电耦合系统的研究*
2014-02-27 04:34徐志峰周逢军
汽车工程 2014年3期
林 程,徐志峰,张 汝,王 刚,周逢军
(北京理工大学机械与车辆工程学院,北京 100081)
前言
独立驱动电动汽车可以通过单独控制每个驱动轮的驱动转矩来改善车辆的行驶性能,具有集中驱动无法比拟的优点,是电动汽车的重要发展方向[1]。
但多轮独立驱动还存在较大缺陷:当车辆行驶在对开路面时,如果处于低附着路面上的车轮打滑,则必须减小该侧驱动电机的输出转矩,使车轮恢复正常转动,这时主要依靠高附着系数路面的驱动电机进行驱动,浪费了打滑车轮一侧电机的驱动功率,在这点上不如带防滑差速器的单电机集中驱动车辆。为此,本文中选用黏性联轴器作为机电耦合装置,并通过整车仿真验证黏性联轴器对整车性能的影响。
1 黏性联轴器的布置和转矩特性
以北京理工大学电动车辆国家工程实验室发明的具有防滑差速功能的双电机独立驱动车辆为平台[2],进行设计和研究。整车主要零部件和黏性联轴器的布局如图1所示。
黏性联轴器的内部结构如图2所示。它由输入轴、输出轴、外壳(与输出轴相连)、内摩擦片、外摩擦片、作为黏性工作介质的硅油以及油封组成。
黏性联轴器有剪切和驼峰两种工作状态,在车辆正常行驶过程中其处于剪切状态,即通过剪切硅油,实现转矩从高速端到低速端的传递。
黏性联轴器内的硅油和空气的混合流体是非牛顿流体[3],再结合油膜剪切原理,可得到黏性联轴器的转矩计算模型为
式中:ε为孔槽影响系数;n1、n2分别为内、外摩擦片数;ρ1、ρg为标准状态下硅油和空气的密度;η0为硅油的初始填充率;γB为参考剪切率;a、b、c、d为常数;v0为硅油在零剪切率以及25℃时的运动黏度值;T为硅油某时刻的瞬时温度;ΔN为内外摩擦片的转速差;s为油膜厚度;r1和r2分别为外摩擦片的内半径和内摩擦片的外半径;n为硅油流动指数。
2 黏性联轴器参数设计和试验分析
本文中所选用的目标车型主要参数如表1所示。经实验测得,汽车正常转向时,左右车轮的最大转速差为80r/min左右[4],即所设计的黏性联轴器的驼峰触发转速差必须大于此值。表2为黏性联轴器的主要技术参数。
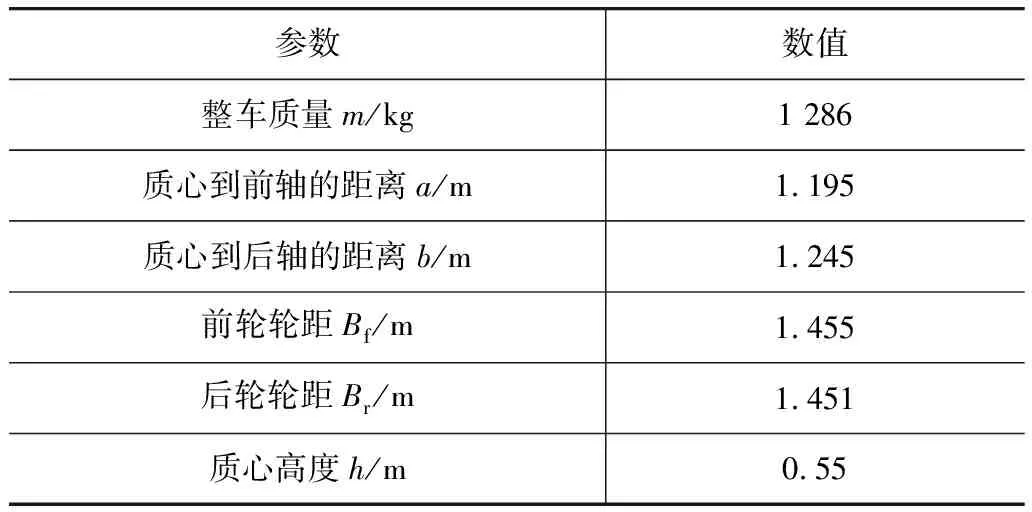
表1 目标车型的主要参数
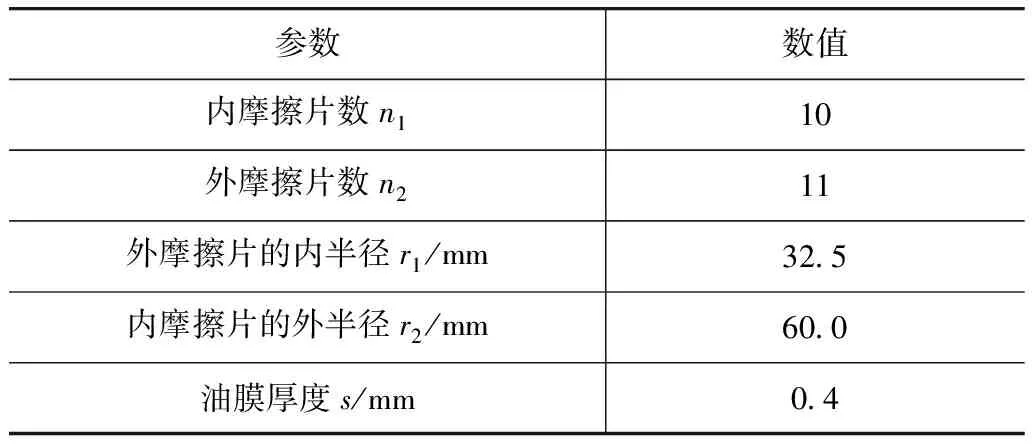
表2 黏性联轴器主要技术参数
图3为黏性联轴器主要零部件。按照上面提到的转矩传递特性建立黏性联轴器的Simulink模型,将仿真结果与台架实验数据进行对比[5],结果如图4所示。由图可见,仿真结果与实验数据基本吻合。
3 整车动力学模型
本文中建立了7自由度车辆模型,包括车体的纵向、横向和横摆运动,以及4个车轮的转动。同时假定车辆行驶在水平路面,并忽略空气阻力的影响。建立整车坐标系,如图5所示。
整车运动方程为
驱动车轮和从动车轮的旋转运动方程为
式中:Iw为车轮的转动惯量;Td为电机传给驱动轮的转矩;Fx为车轮受到的地面力;Tf为滚动阻力矩;Tlsd为黏性联轴器传递的转矩,动力学计算时高速端取负值,低速端取正值。
模型中轮胎模型选用郭孔辉院士提出的统一轮胎模型,轮胎纵向力Fx、侧向力Fy和回正力矩M为[6]
M=Fy(Dx+Xc)-FxYc
Dx=(Dx0+De)exp(-D1φ-D2φ2)-De
4 车辆仿真分析
下面对不同工况下装有和未装黏性联轴器的车辆进行仿真研究。
4.1 动力性仿真
设定左侧车轮所处的路面附着系数为0.8,右侧路面附着系数为0.2,车辆在对开路面上起步加速。各驱动车轮滑转情况和加速曲线如图6~图8所示。
从图6可见,安装黏性联轴器后,高附着系数路面上的车轮滑转率略高于安装前,但依然处于正常状态。这是由于右侧电机的部分转矩经黏性联轴器传到了左侧车轮。
从图7可以看出,未安装黏性联轴器的车辆右前轮出现严重的滑转现象,这时只能依靠减小右侧电机的输出转矩来抑制滑转。而装有黏性联轴器的车辆能有效地消除低附着系数路面上车轮的滑转现象,此时无需减小右侧的驱动转矩,从而降低了整车对驱动防滑控制系统的依赖。而且从图8可见,装有黏性联轴器的车辆加速性能有明显改善。综上所述,相比单一地调节电机转矩进行防滑控制,加装黏性联轴器后,整车加速性和安全性都有明显提高。
4.2 稳定性仿真
4.2.1 稳态转向运动
设车辆在运动过程中转向角不变,始终为9°,车速由零增加到40km/h后匀速行驶。图9和图10为车辆行驶在高附着系数路面上的仿真结果。图11和图12为车辆在低附着系数路面上的仿真结果。
由图可见,安装黏性联轴器的车辆在稳态转向时,横摆角速度和侧向加速度都略低于普通车辆,有轻微的不足转向趋势。即安装黏性联轴器后,在不影响车辆正常转向的同时,提高了整车的操纵稳定性。
4.2.2 瞬态转向运动
设车辆从静止加速到40km/h,待车速稳定于40km/h后,突然给车辆一个9°的转向角,之后保持该转向角不变。图13和图14分别为车辆行驶于高附着系数路面和低附着系数路面的仿真结果。可见,安装黏性联轴器的车辆在瞬态转向时,横摆角速度略低于普通车辆,有轻微的不足转向趋势。
4.2.3 蛇形运动
设车辆以10m/s的速度匀速行驶在良好路面上,第8s时通过控制转向盘,使车辆作蛇行运动。仿真进行20s。图15为黏性联轴器传递的转矩,图16为安装黏性联轴器前后整车横摆角速度对比。
图15中转矩的正负体现车辆蛇形运动过程中转矩传递的方向,转矩呈正弦规律变化。从图16可见,安装黏性联轴器后,横摆角速度略低于普通车辆,整车的操纵稳定性得到提高。
5 结论
安装黏性联轴器作为机电耦合装置后,不仅使独立驱动车辆在对开路面上的动力性和安全性明显提高,简化了驱动防滑控制策略,并且不影响车辆的正常转向,使其呈现不足转向趋势,操纵稳定性得到改善。对于现有独立车轮驱动系统存在的无法实现左右电机动力耦合的弊端,提出了一种可行的备选方案。
[1] Yoichi Hori. Future Vehicle Driven by Electricity and Control-research on Four-wheel-motored “UOT Electric March II”[J]. IEEE Transactions on Industrial Electronics,2004,51(5):954-962.
[2] 北京理工大学.电动汽车双电机防滑差速驱动桥:中国,200810097693.5[P].2009-09-02.
[3] Mohan S K, Ramarao B V. Viscous Coupling in 4WD Vehicles: Application of Computational Modelling[C]. SAE Paper 1992-01-0611.
[4] 张利鹏.双电机独立驱动汽车动力学仿真与控制[D].北京:北京理工大学机械与车辆工程学院,2011.
[5] 刘亮,夏国栋.液体粘性联轴器剪切转矩计算方法[J].汽车工程,2003,25(1):30-33.
[6] 付皓.汽车电子稳定性系统质心侧偏角估计与控制策略研究[D].长春:吉林大学汽车工程学院,2008.
猜你喜欢
科学与生活(2021年16期)2021-11-25
新农村(浙江)(2021年7期)2021-07-07
大连海洋大学学报(2021年1期)2021-03-13
临床眼科杂志(2020年4期)2020-12-13
科学导报(2020年30期)2020-05-21
当代陕西(2019年14期)2019-08-26
民用飞机设计与研究(2019年4期)2019-05-21
兵器装备工程学报(2019年3期)2019-04-11
华人时刊(2017年17期)2017-11-09
中国机械(2015年1期)2015-10-21
