
旋转磁偶极子产生的感应电场研究
2014-03-01 06:54张伽伟龚沈光姜润翔陈聪
兵工学报 2014年2期
张伽伟,龚沈光,姜润翔,陈聪
(海军工程大学 兵器工程系,湖北 武汉430033)
0 引言
轴频电场是船舶的一个重要目标特征信号,由于该电场具有明显的线谱特征和谐波成分,且具有足够的可测量强度,而作为一种新的舰船信号源得到广泛的重视。近些年来,国内外许多学者在轴频电场的检测和轴频电场的控制方面做了大量工作[1-5]。目前,普遍认为轴频电场是由于螺旋桨转动时因主轴和轴承之间的接触阻抗不恒定而导致流经主轴的腐蚀或防腐电流受到周期性调制而产生的,且以螺旋桨转动频率为基频[6-7]。但是由于船舶的螺旋桨一般由合金制造,约含有10%以上的铁磁性金属物质,铁磁性的螺旋桨受地磁场磁化而产生磁性。当其旋转时就会在产生感应电场,且该电场的频率也是以螺旋桨转动频率为基频,因此磁性螺旋桨旋转所产生的感应电场也是轴频电场的重要组成部分。研究磁性螺旋浆旋转的感应电场可以完善轴频电场的产生机理,为检测和控制轴频电场提供理论参考。磁偶极子作为磁场的基本单元,对于一般磁性物体的磁场在一定距离外均可以近似等效为磁偶极子的磁场,即使是在近场也可以用磁偶极子阵列进行拟合(阵列的感应电场模型等于各磁偶极子产生感应电场模型的叠加)。因此,本文以磁偶极子等效磁性螺旋桨,建立了磁偶极子旋转产生感应电磁场的数学模型,仿真得到了该感应电场幅度特性、频率特性和三轴分量的相位关系,并通过实验验证了理论模型的正确性。
1 理论推导
如图1所示,将船舶的磁性螺旋桨等效为一磁偶极子,磁矩m=mxi+myj+mzk,位于坐标原点O,以角速度ω 绕z 轴做匀速旋转运动。其中i、j、k 分别为直角坐标系x、y、z 方向的单位向量,mx、my、mz分别为磁偶极子在x、y、z 三轴的分量。

图1 旋转磁偶极子Fig.1 Rotating magnetic dipole
在t 时刻,磁偶极子x 方向的磁矩分量为m'x=mxcos(ωt)-mysin(ωt),y 方向的磁矩分量为m'y=mxsin(ωt)+mycos(ωt),z 方向的磁矩分量为m'z=mz.磁偶极子的总磁矩m' =m'xi+m'yj+m'zk,那么对于空间中任意一点(x,y,z),t 时刻磁偶极子的磁场分布为

式中:μ0为真空磁导率;r 为磁偶极子指向观测点位置矢量,r=xi+yj+zk.
由法拉第电磁感应定律环路积分公式[8]

选取恰当的积分环路以计算空间中任一固定点p(x,y,z)的感应电场强度E[9]。
磁偶极子绕磁矩轴旋转,磁感应强度B 在x 轴、y 轴两个方向都会发生变化,z 轴方向不变。因此选取经过点p(x,y,z)的3 个积分环路l1、l2和l3,分别以(x,0,0)、(0,y,0)和(0,0,z)为圆心。以环路l1为例,由于环路上,各电场大小处处相等,方向和积分线元同向,因此有

式中:E1为环路l1上的感应电场。
磁感应强度在x 轴方向的分量Bx的大小为

将(3)式、(4)式代入(2)式,令y = ρcosθ,z =ρsinθ,经过变量代换可得

最终计算得到

同理可得

感应电场E1、E2分别与以点(x,0,0)和(0,y,0)为起点,p(x,y,z)为终点的向量垂直,并且E1的方向和x 轴正方向,E2的方向和y 轴正方向,构成右手螺旋关系,E1的位置关系如图2所示。
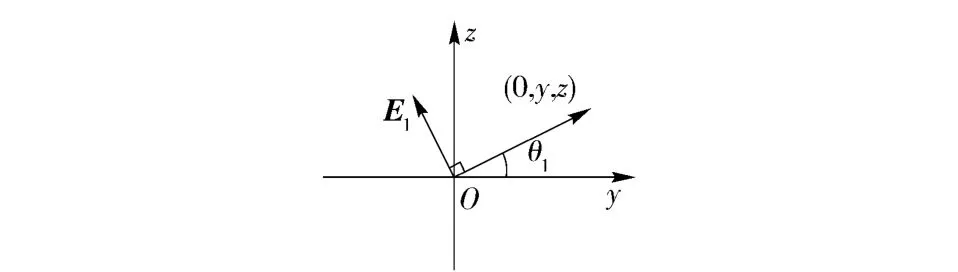
图2 E1 矢量图Fig.2 Vector diagram of E1
在图2中,E1= - E1sin θ1j + E1cos θ1k,其中为p(x,y,z)的位置矢量在y-z 平面投影与y 轴的夹角;E2=E2sin θ2i -E2cos θ2k,其中为p(x,y,z)的位置矢量在x-z平面投影与x 轴的夹角。点p(x,y,z)的感应电场强度E 的表达式为

将(6)式、(7)式代入(9)式,得到p 点的感应电场为

2 实例仿真计算
选用1.7 cm×1.7 cm×8 cm 的一块条形磁铁,经三轴光泵磁强计测得不同位置的磁场强度,采用最小二乘法计算得到三轴磁矩分量为:mx≈-0.51 A·m2;my≈-6.70 A·m2;mz≈-0.66 A·m2.令磁铁绕mz= -0.66 A·m2方向的中心旋转,取角速度ω=5π rad/s (f =2.5 Hz),海水磁导率μ0=4π×10-7H/m,仿真计算得到在空间一固定点p(0,0.05,0.4)处的感应电场三分量如图3所示。

图3 感应电场仿真结果Fig.3 The simulation results of induced electric field
由图3可知:感应电场x 轴分量和y 轴分量峰值相等为7.5×10-5V/m,相位相差rad;y 轴分量和z 轴分量相位相差π rad,z 轴分量峰值为1.0×10-5V/m,且信号频率为2.5 Hz.
3 实验验证
选用上述条形磁铁等效磁偶极子,使其绕磁矩mz= -0.66 A·m2的方向在水面做ω =5π rad/s 的匀速旋转运动,用银-氯化银电极组成的三轴测量系统在水下测量,其中x、y、z 方向测量电极与参比电极距离均为10 cm,实验水池水深为85 cm,参比电极距水面40 cm,磁铁与参比电极的水平距离为5 cm.该系统测得的信号经放大、滤波调理后由数据采集卡采集存储,采样频率为20 Hz.经过处理后所得到的实测信号与理论计算结果对比如图4所示。

图4 实测信号与理论计算结果对比Fig.4 Comparison of measured signals and theoretical values
在t 为3.3 ~10 s 期间磁铁旋转,从图4(a)可知:实测感应电场x 轴分量和y 轴分量峰值十分接近,分别约为9.6×10-5V/m 和9.8×10-5V/m,两分量之间相位相差π/2 rad;z 轴分量峰值约为2.2×10-5V/m,z 轴分量与y 轴分量之间相位相差π rad,结果与图3中实例仿真计算结果完全一致。从图4(b)可以明显看出:理论计算值与实测信号在同一量级且相差较小(理论计算x 和y 轴分量为7.5×10-5V/m,z 轴分量峰值为1.0×10-5V/m),相位特征方面是完全相同的,且信号频率均等于磁铁旋转频率。
实验结果表明了本文关于旋转磁体产生的感应电场分析方法的正确性。
4 结论
文中通过理论推导和实验验证,得到了旋转电偶极子感应电场的特性:
1)感应电场的幅度与磁体的磁矩和旋转频率呈正比。
2)x 分量与y 分量,z 分量与y 分量之间相位差分别为π/2 rad 和π rad,且与旋转频率无关,恒定不变。
3)感应电场的频率等于磁体的旋转频率。
信号频率的特性说明了磁性螺旋桨旋转产生的感应电场与轴旋转调制产生的电场频率一致,该感应电场是船舶轴频电场的组成部分。信号分量相位差的相关性可以进一步用于检测该信号。
References)
[1] 胡鹏,龚沈光,胡英娣.基于小波包熵的船舶轴频电场信号检测[J].华中科技大学学报:自然科学版,2011,39(11):15-18.HU Peng,GONG Shen-guang,HU Ying-di.Detection of ship shaft-rate electric field signals using wavelet packet entropy[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2011,39(11):15 -18.(in Chinese)
[2] 李松,张春华,栾经德.舰船轴频电场基频线谱的模糊评判方法研究[J].兵工学报,2009,30(12):1738 -1741.LI Song,ZHANG Chun-hua,LUAN Jing-de.Detection of line spectrum of fundamental frequency on shaft-rate electric field of a ship[J].Acta Armamentarii,2009,30(12):1738 -1741.(in Chinese)
[3] Dymarkowski K,Uczciwek J.The extremely low frequency electromagnetic signature of the electric field of the ship[C]∥Proceedings from Undersea Defence Technology Conference and Exhibition.Waikiki,HI:UDT,2001:1 -6.
[4] Bostick F,Smith H,Boehl J.The detection of ULF-ELF emissions from moving ships[R].New York:State Academic Educational Institutions,1977.
[5] 谭浩,龚沈光,贾利.基于神经网络的船舶轴频电场特征控制实验[J].华中科技大学学报:自然科学报,2012,40(4):84-87.TAN Hao,GONG Shen-guang,JIA Li.Controlling shaft-rate electric field using RBF neural networks[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2012,40(4):84 -87.(in Chinese)
[6] 卢新城,王婷,陈新刚,等.海船轴频电场建模方法研究[J].武汉理工大学学报:交通科学与工程版,2012,36(1):168 -170.LU Xin-cheng,WANG Ting,CHEN Xin-gang,et al.Research on the modeling method of a sea going vessel’s shaft-rate electric fields[J].Journal of Wuhan University of Technology:Transportation Science & Engineering,2012,36(1):168 -170.(in Chinese)
[7] 林春生,龚沈光.舰船物理场[M].北京:兵器工业出版社,2007:233 -246.LIN Chun-sheng,GONG Shen-guang.Ships physical fields[M].Beijing:the Publishing House of Ordnance Industry,2007:233 -246.(in Chinese)
[8] 林德云,李国定.电磁场理论基础[M].北京:清华大学出版社,1994:145.LIN De-yun,LI Guo-ding.Fundamentals of electromagnetics theory[M].Beijing:Tsinghua University Press,1994:145.(in Chinese)
[9] 孙明.舰船感应电场和极低频电场研究[D].武汉:海军工程大学,2003.SUN Ming.Research on induced and extremely low frequency electric fields of ship[D].Wuhan:Naval University of Engineering,2003.(in Chinese)
猜你喜欢
河北工业大学学报(2021年4期)2021-09-23
航空发动机(2020年3期)2020-07-24
航天器工程(2019年3期)2019-07-31
数字海洋与水下攻防(2019年2期)2019-06-28
中学科技(2017年10期)2017-11-04
现代防御技术(2017年2期)2017-05-13
航天器环境工程(2016年4期)2016-09-09
全球定位系统(2015年4期)2015-02-28
上海航天(2014年1期)2014-12-31
中国舰船研究(2014年1期)2014-05-14
