用于微纳米几何量尺寸测量的三维微接触式测头*
2014-03-14 09:05吴俊杰上海市计量测试技术研究院
上海计量测试 2014年5期
李 源 吴俊杰 / 上海市计量测试技术研究院
用于微纳米几何量尺寸测量的三维微接触式测头*
李 源 吴俊杰 / 上海市计量测试技术研究院
为实现微纳尺度器件三维几何形貌测量及表征,基于电容和压阻原理,开发了两种三维微接触式测头。其中电容测头测量范围4.5 μm,轴向分辨力和横向分辨力分别为10 nm和25 nm;压阻测头测量范围4.6 μm,轴向分辨力和横向分辨力分别为5 nm和10 nm。两种测头均可集成到纳米测量机,实现微结构几何参数的测量。
微接触式测头;电容传感器;压阻传感器;纳米测量机
0 引言
纳米科技、MEMS(微机电系统)技术和超精密加工技术的发展,对微小器件尺寸测量提出了更高的要求。医疗、精密机械、塑料、印刷等领域中器件的微型化和功能化发展已成为一种趋势[1]。随着器件结构的微型化和复杂化,解决高深宽比、大尺寸器件的高准确度测量和表征问题显得尤为重要[2]。虽然光学测量方法具有准确度高、速度快、非接触等诸多优点,但其性能受被测样品表面特性的影响较大,因而使用范围受到很大的限制。在生产测量技术领域,集成接触式测头的坐标测量技术已经成为实际的行业标准[3]。当前测头开发的研究工作主要集中在三个方面:1)新型测量方法的研究;2)测量结构的工艺改进;3)测量软件算法的改进[4]。
受测球尺寸和测头系统性能等因素限制,传统的接触式测头系统不适合测量微小部件。因此,开发满足微纳米尺度测量要求的接触式测头系统具有重要意义。根据传感原理的不同,触觉传感器可分为电容式、压阻式、压电式、电感式、光电式、应变计式等,将上述两种或两种以上的传感原理进行组合即构成复合式触觉传感器[5]。近十年来,基于纳米测量机的接触式测头研究成为热点。典型的有英国国家物理实验室(NPL)的电容式微接触测头和压电式微接触测头[6,7],德国联邦物理研究院(PTB)的硅薄膜微接触测头和光纤微接触测头[8,9],荷兰埃因霍温技术大学(TUE)的压阻式微接触测头[10,11],瑞士联邦计量检定局的电磁式微接触测头[12]等。
1 基于电容原理的三维微接触式测头
基于电容原理的三维微接触式测头主要由玻璃基底、微电容传感器和测针组成。玻璃基底用于固定微电容的下极板和支柱,微电容用于感受位移的变化,并将其转化为可测量的电信号,测针用于探测和传递位移。测头结构如图1所示。
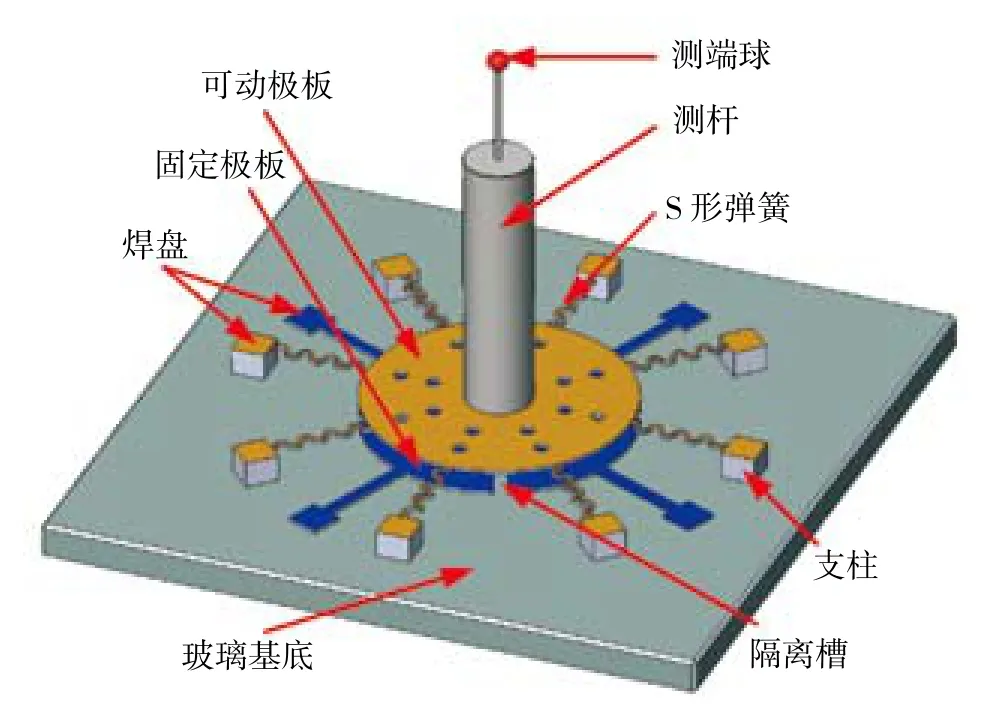
图1 电容式三维微接触测头结构
测头基于变极距形平行板电容器原理。为测量横向位移,将下极板分割成a、b、c、d四块。测头的轴向和横向检测模型如图2所示。

图2 电容式三维微接触测头检测模型
测量轴向位移时,将下极板a、b、c、d相连,被测电容变化为
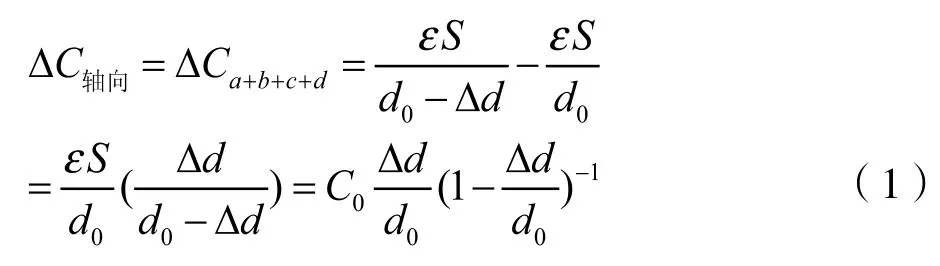
式中:ε— 介电常数;
S— 电容极板有效相对面积;
Δd— 极板间距变化;
d0— 极板初始间距;
C0— 初始电容,
由于Δd<<d0,式(1)可按Taylor级数展开,略去高次项,得:

测量横向位移时,将下极板a、b相连,c、d相连(或a、d相连,b、c相连)。此时,上、下极板形成两个电容,由于上极板偏转引起的电容极距变化量沿着r方向是变化的,建立精确的计算模型比较困难。因开发的电容式三维微触觉测头用于实际测量前需进行校准,为简化模型,在理论分析中,用 等效极板偏转后的极距变化d′,并用平行平板电容计算公式分别计算两个电容的变化量,按Taylor级数展开后作差,略去高次项,得:

式(3)中,虽然电容的变化量仍与位移呈非线性关系,但是消除了级数中的偶次项,线性得到了改善。
传感器采用电镀工艺加工,经过溅射种子层、反应离子刻蚀、光刻、结构释放等工艺步骤后,最终完成的电容测头实物如图3所示。
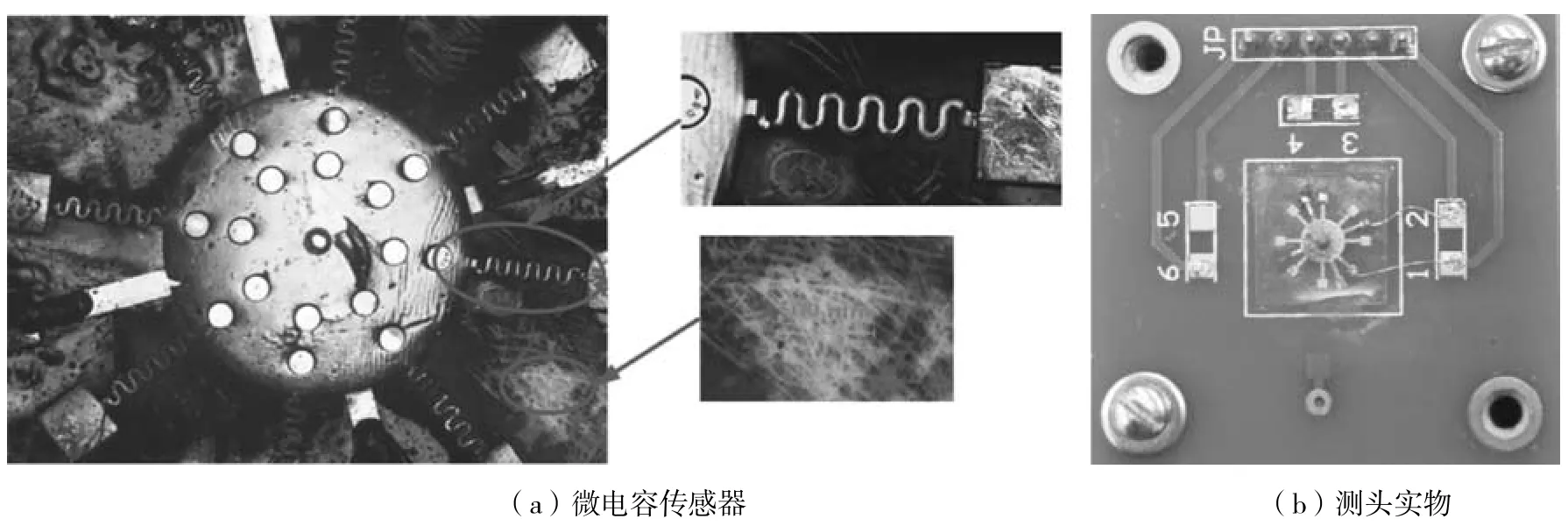
图3 电容测头实物图
为完整地表征测头的输入输出特性,对测头的测量范围、线性、迟滞及分辨力进行了测试[13],结果表明测头的轴向测量范围为4.5 μm,轴向分辨力为10 nm,横向分辨力为25 nm。测头横向和轴向输入、输出曲线图如4所示。测头触发点位于0.5 μm处,在5 μm时,由于轴向量程达到极限值,此时上、下极板已接触,此处的值为-8 pF,符合数据采集电路的短路特性。
2 基于压阻原理的三维微接触式测头
基于压阻原理的三维微接触式测头主要由十字形敏感梁和测针组成,其结构如图5所示。

图4 电容式测头输入、输出特性曲线
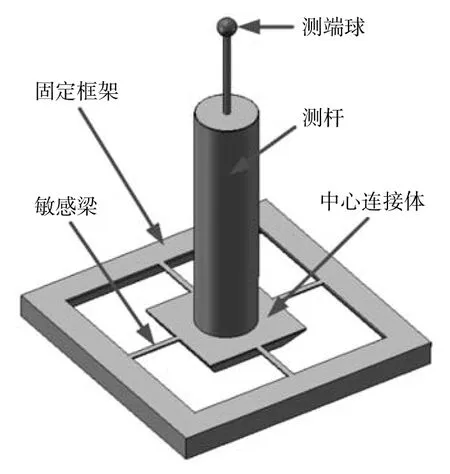
图5 压阻式三维微接触测头结构
当测头受轴向(或横向)负载时,测端球的位移通过测杆传递给中心连接体,引起中心连接体的位移(或偏转),进而引起敏感梁上压阻值的变化。利用惠斯通电桥检测压阻阻值的变化,并通过相应的位移传递函数即可计算出测端球的位移值。测头位移检测模型如图6所示。

图6 压阻式三维微接触测头位移检测模型
当测头轴向偏移Δz时,敏感梁两端产生的轴向位移差Δz′为

当测头横向偏移时,测杆以中心连接体中心为原点偏转θ1角,由于测杆与中心连接体均为刚体,可认为中心连接体偏转角θ2≈θ1,则有:

由于敏感梁长度远大于厚度,因此横向负载下中心连接体的x向偏移相对于z向偏移非常小,可认为中心连接体只沿y轴旋转而无x向偏移。测端球位移与测头输出关系曲线可直接通过校准实验得出。
测头的敏感单元采用体硅MEMS工艺进行加工,通过氧化、光刻、扩散、腐蚀、溅射和结构释放等工艺流程,最终完成的敏感单元及测头实物如图7所示。

图7 压阻式三维微接触测头实物

图8 压阻式测头轴向特性曲线
测头轴向的输入、输出特性如图8所示。轴向测量范围约为4.6 μm,横向测量范围理论上应大于轴向测量范围,由于实际测试时存在导致测头损坏的风险,因此未进行测试。测头的轴向分辨力为5 nm,横向分辨力为10 nm,并有较好的线性特性[14]。
3 结语
本文基于电容和压阻这两种不同检测原理,设计了两种可用于微纳尺度几何量测量的三维微触觉测头,建立了测头的检测模型,给出了测头的输入输出特性曲线,并列出了两种测头的测量范围及分辨力参数。其中,电容测头测量范围4.5 μm,轴向分辨力10 nm,横向分辨力25 nm;压阻测头测量范围4.6 μm,轴向分辨力5 nm,横向分辨力10 nm。受测量原理影响,压阻测头的分辨力及线性均优于电容测头。
两种测头均可集成到纳米测量机,用于实现具有高深宽比结构的微器件几何尺寸的纳米级准确度测量。本文后续研究主要包括测头与纳米测量及定位平台的集成技术,包括机械结构设计、通信接口开发及软硬件集成等。同时,还将对测头设计和工艺进行进一步优化,研究温漂、测量力等参数。
[1] MARES A I, BERGMANS R H. Evaluation of an optical coordinate measuring machine for measuring grated structures[J]. Meas. Sci. Technol., 2012, 23(9): 1-7.
[2] MANSKE E, GAGER G, HAUSOTTE T, et al. Recent developments and challenges of nanopositioning and nanomeasuring technology[J]. Meas. Sci. Technol., 2012, 23(7): 1-10.
[3] PETZ M, TUTSCH R, CHRISTOPH R, et al. Tactile-optical probes for three-dimensional microparts[J]. Measurement, 2012, 45(10): 2288-2298.
[4] 蔡轶珩, 向大超, 石照耀, 等. 球内反射式光纤测头[J]. 仪器仪表学报, 2011, 32(12): 2740-2746.
[5] TIWANA M I, REDMOND S J, LOVELL N H. A review of tactile sensing technologies with applications in biomedical engineering[J]. Sensors and Actuators A: Physical, 2012, 179: 17-31.
[6] PEGGS G N, LEWIS A J, OLDFIELD S. Design for a compact highaccuracy CMM[J]. CIRP Annals - Manufacturing Technology, 1999, 48(1): 417-420.
[7] RICHARD K LEACH, JAMES CLAVERLEY, CLAUDIU GIUSCA, et al. Advances in engineering nanometrology at the National Physical Laboratory[J]. Measurement Science and Technology, 23(7):074002.
[8] BUTEFISCH S, BUTTGENBACH S, KLEINE-BESTEN T, et al. Micromechanical three-axial tactile force sensor for micromaterial characterization[J]. Microsystem Technologies, 2001, 7(4): 171-174.
[9] HANSEN H N, CARNEIRO K, HAITJEMA H, et al. Dimensional micro and nano metrology[J]. CIRP Annals - Manufacturing Technology, 2006, 55(2): 721-743.
[10] BOS E J C. Tactile 3D probing system for measuring MEMS with nanometer uncertainty[D]. Eindhoven: Technische Universiteit Eindhoven, 2008.
[11] PRIL W O. Development of high precision mechanical probes for coordinate measuring machines[D]. Eindhoven: Technische Universiteit Eindhoven, 2002.
[12] MELI F, FRACHEBOUND M, BOTTINELLI S, et al. High precision, low force 3D touch probe for measurements on small objects[C]. Proc. of EUSPEN, Aachen, Germany, 2003.
[13] 吴俊杰, 李源, 李东升, 等. MEMS电容式三维微触觉测头设计及校准[J]. 光学精密工程, 2013, 21(12): 98-105.
[14] 吴俊杰. 纳米测量机三维微触觉测头开发[D]. 杭州: 中国计量学院, 2014.
Research on 3D micro tactile probe for microand nanometer dimensional measurement
Li Yuan, Wu Junjie
(Shanghai Institute of Measurement and Testing Technology)
In order to realize dimensional measurement and characterization of miniaturized components in micro/nano scale, two 3D micro tactile probes were developed based on capacitive and piezo-resistive principle. Range of capacitive probe is 4.5 μm, with a resolution of 10 nm and 25 nm in axial and lateral direction, respectively. The piezoresistive probe has an axial and lateral resolution of 5 nm and 10 nm in full range of 4.6 μm. The two probes can be integrated to nano measuring machine to realize measurement of geometrical parameter in microstructures.
micro tactile probe;capacitive sensor;piezo-resistive sensor;nano measuring machine
国家质检总局公益专项(201110051)
猜你喜欢
红外技术(2022年4期)2022-04-25
科教创新与实践(2021年33期)2021-11-23
中学生数理化·高一版(2021年3期)2021-06-09
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30
中学生数理化·高一版(2020年1期)2020-02-20
进出口经理人(2017年9期)2017-09-22
兵器装备工程学报(2016年5期)2016-06-15
动力工程学报(2016年3期)2016-04-19
医疗卫生装备(2015年9期)2015-12-27
中国光学(2015年5期)2015-12-09