
吉牛水电站坝体变形监测方案优化设计
2014-03-23 01:54李俊富
东北水利水电 2014年11期
文 豪,李俊富
(1.国电大渡河流域水电开发有限公司,四川 成都 610041;2.中水东北勘测设计研究有限责任公司,吉林 长春 130061)
吉牛水电站坝体变形监测方案优化设计
文 豪1,李俊富2
(1.国电大渡河流域水电开发有限公司,四川 成都 610041;2.中水东北勘测设计研究有限责任公司,吉林 长春 130061)
吉牛水电站大坝变形监测原设计采用引张线加静力水准方案,并在坝体两端增加倒垂线及双金属标。后采用“DB3200 型真空激光准直测坝变形系统”及其最新专利技术“一种真空激光准直系统端点改正方法”,对方案进行了优化设计并成功实施。优化后的方案投资低于原设计方案,观测精度也优于原方案,同时实现了自动化观测,直接节约了后期整个监测系统实施自动化的投资。这种单端点改正方法降低真空激光系统设计布置与实施的难度,并节约了工程投资。
吉牛水电站;大坝变形监测;真空激光;单端点改正
1 概述
吉牛水电站位于四川省丹巴县革什扎河流域下游河段,属革什扎河流域水电规划一库四级方案中的第四级梯级电站,为引水式开发。首部枢纽位于丹巴县绕拉乡独狼沟口下游约 0.5km,地面厂房位于革什扎河与大金川河交汇口附近的一级阶地上,工程区内有县级简易公路(丹巴~丹东)通过,在革什扎河口处与省道 S211 线相连,闸、厂区距丹巴县城分别约 30km 和 2.8km,距成都分别约479km 和 452km,对外交通较为方便。
电站为引水式电站。工程枢纽由挡水坝、泄洪闸、引水隧洞、调压井、压力管道及发电厂房等主要水工建筑物组成,电站总装机容量 240MW(120MW/台×2 台),工程总工期 39 个月(不含筹建期)。
2 大坝变形监测原设计方案
吉牛水电站原设计方案是在坝顶布置引张线加静力水准方案,该方案只能测得坝体变形的相对位移测值,还需要在坝体两端增加倒垂线及双金属标,最终联合计算获得坝体的绝对位移测值。该方案主要存在以下问题:
1)前期工程投资较大,后期该项目自动化投资也较多。
2)该方案如果实施并投入运行,运行期的管理与维护的工作量均较大,观测数据的连续性及准确性均受气候因素的影响。
3)大坝左岸为上坝公路及引水发电隧洞进口,该处的倒垂孔只能布置在坝上,要求倒垂孔深度必需穿透坝体及河床覆盖层,深入到基岩稳定区域。钻孔深度超过百米,施工难度极大,工程造价较高。
针对上述问题,设计通过广泛充分的调研,最终根据中水东北勘测设计研究有限责任公司推荐的“DB3200 型真空激光准直测坝变形系统”及其最新专利技术,“一种真空激光准直系统端点改正方法”(以下简称单端点改正方法) 对大坝变形监测方案进行了优化设计。
3 真空激光系统原理
真空激光准直测坝变形系统是把三点法激光准直系统和一套适合大坝变形观测特点的软连接动态真空管道系统合理的结合起来的新系统。三点法激光准直又称为波带板激光准直。波带板又称菲涅尔透镜,它是把菲涅尔半周期带交替地做成通光带和遮光带的一种特殊设计的光栅。这种光栅被激光点光源发出的一束可见的单色相干光照射时,它的遮光带会拦住衍射后将产生负干涉的激光束光线,和聚焦透镜相类似,在光源中心和波带板中心延长线上的一定距离处,形成一个中心特别明亮的衍射亮点(或十字亮线)。并满足公式(1):

f——波带板的焦距;u——波带板到点光源的距离;v——波带板到像点的距离。
如果在像点处布置固定的图像捕获装置,只要固定其中两点,就可以准直第三点。“三点法激光准直”也因此而得名。
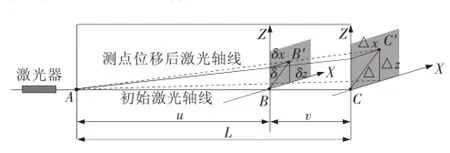
图1 三点法激光准直测坝变形原理图
如图1所示,若在大坝两端稳定的地点分别固定点光源A和光斑成像装置C(如果两个端点非稳定不变,可采用倒垂线及双金属标法获得端点位移),在需要观测变形的各坝段测点上设相应焦距的波带板 B,当测点(波带板中心)位移了一段距离 δ(BB′,它的水平分量 δx 就是该点的水平位移,垂直分量 δz就是该点的垂直位移),在光斑成像装置处的光斑像点也位移了一段距离△(CC′)。通过图像捕获装置测出△在两坐标轴上的分量△x、△z,有下列公式即可计算出测点 B 的水平、垂直两向位移值。
该系统是波带板真空激光准直和一套真空管道合理结合的变形观测系统,系统的激光束在真空中传输,可以消除大气折光差对测量精度影响。该方法不但具有高效率、高精度,还可在长距离变形观测中应用,该方法可同时测量水平位移与垂直位移,可以说是观测精度、作业效率及作业条件最好的一种变形观测方法。该方法主要应用于直线型大型水工建筑物的变形观测,既适用于短坝,也适用于长度达千米的直线坝;不仅适用于温度变幅大、位移大的坝顶,同样适用于湿度大、位移小的基础廊道。
4 单端点改正方法原理
如果采用真空激光准直测坝变形系统,坝体左岸的倒垂孔还是需要实施,才能保证系统获得坝体的绝对位移测值。针对该问题中水东北勘测设计研究有限责任公司建议采用单端点改正方法,该方法是其针对真空激光准直测坝变形系统多年潜心研究的发明成果,主要原理如下:
1)将发射端设备安装于稳定位置,如该位置不稳定需安装端点绝对位移测量设备。
2)在距离发射端 5~20m 范围内安装一个用于接收端位移改正的测点,该测点和发射端设备要求安装在同一个平台上或保证该测点位置随同发射端同步变化。
3)通过测量该测点箱位置的位移变化量及端点改正计算方法,计算出接收端较发射端的相对位移变化量,该相对位移变化量加上发射端的绝对位移即为接收端的绝对位移变化量。
该方法实施的前提是要求两个端点中的任何一个端点处于稳定状态或可布置端点绝对位移测量设备,新技术可通过该端点的绝对位移变化计算出另一个端点的绝对位移变化量,从而减少了系统布置与实施的难度。同时因减少了一个端点绝对位移测量设备,可极大的节约工程投资。

图3 位移后准直示意图
端点改正计算方法如下:
Fx0,Fz0分别为发射端位置位移 X 向、Z 向的初始测值,Fxn,Fzn分别为发射端位置位移的第 n 次观测值,发射端位置位移测值是通过端点位移测量设备得到的,则发射端 X 向、Z 向第 n 次观测的绝对位移变化 量分别为 Fxn-Fx0,Fzn-Fz0,当发 射端位置处于稳定状态时 Fxn=Fx0,Fzn=Fz0,发射端位置 X向 、Z 向 的绝 对位 移变 化 量 均 为 0;Ax0,Az0为 端 点改正测点相对于接收端观测坐标系的测值,通过激真空激光准直位移测量装置测得,即为接收端X 向、Z 向的初始值,Axn,Azn 分别为端点改正测点相对于接收端观测坐标系的第 n次观测值;位移变化量的方向为;水平X向——坝体向下游位移为正,向上游位移为负;垂直 Z 向——坝体向下沉降为正,向上抬升为负,则第 n 次观测到的接收端绝对位移变化量计算公式为:
RXn=(Ax0-Axn)+(Fxn-Fx0) (2)
RZn=(Azn-Az0)+(Fzn-Fz0) (3)
式 中 :Fx0——发射端位置 位 移 X 向 的 初始测值;Fz0——发 射 端 位置 位 移 Z 向 的 初 始 测 值 ;Fxn——发 射端位 置 位 移的 第 n 次 X 向 观测 值;Fzn——发射 端位置 位移的 第 n 次 Z 向 观 测 值 ;Ax0——端点改正测点相对于接收端观测坐标系的X向的初始测 值;Az0——端点 改正 测 点 相对 于 接 收端 观测 坐标系的 Z 向的初始测值;Axn——端点改正测点相对于接收端观测坐标系的第n次X向观测值;Azn——端点改正测点相对于接收端观测坐 标系的第 n 次 Z 向观测值;RXn——接收端水平 X 向第 n次观测的绝对位移变化量;RZn——接收端 垂直 Z向第n次观测的绝对位移变化量。
5 优化后的方案设计
吉牛水电站坝顶变形监测方案最终选定采用真空激光准直测坝系统,并结合“单端点改正方法”进行优化设计。
5.1 系统布置
真空激光准直测坝变形系统的发射端布置于右岸山体灌浆平洞内 40m 处,接收端布置于左岸坝上观测房内,测点数量为 10 个,其中 LA10 为接收端绝对位移改正测点,布置在右岸山体灌浆平洞内 35m 处,其余为正常变形观测测点,布置在坝顶,与原设计方案测点位置相同。
5.2 激光观测房
1)发射端观测室设置于右岸山体平洞内 40m处,在该位置将洞身封闭成一间房屋。在该位置处山体已可认为是稳定的,虽然增加了真空管道长度,但不需要设备倒垂线及双金属标进行端点改正,可节约可观的工程投资。
2)接收端观测室设置于左岸观测房内,由于原观测房尺寸无法满足系统布置要求,因此在原观测房的左侧扩建一个尺寸为 6m×3m×3m 观测房。接收端采用位于右岸山体平洞内的 LA10 号测点进行绝对位移的改正,不再设置倒垂线及双金属标,可大幅节约工程投资。
5.3 真空管道及测点
1)真空管道采用直径 φ219 无缝钢管,相关与测点箱连接的软管均采用直径 φ219 的波纹管,管道长度约 150m。
2)测点共计 9 个,测点直接安装于坝顶预留测点坑内,测点底部浇筑测点墩,并采用 4 根φ22× 250mm 插筋确保测点箱体与坝顶混凝土紧密相连,基坑内用风钻向上游侧下方打排水孔两个,排水孔孔口要求位于基坑下游侧,以方便如果排水孔淤堵后的清理。
3)测点箱全部使用 φ219 形标准测点箱,测点箱内部波带板翻转装置及测点控制模块的型号均一致,降低系统的使用与维护难度。
5.4 抽真空控制系统
1)整个管道容积约 5.2m3,使用 2 台 2×4 旋片式风冷真空泵,无需冷却水系统。观测真空度设计小于60Pa,从大气压下抽至观测真空度时间约 40min。
2)真空控制器及真空泵安装在收端观测房内,采用箱式壁挂安装。
5.5 人工观测及自动化观测系统
人工采用精密二维平移台配合便携式测点控制器观测,自动化采用安装在接收端观测室机柜内的工控机上的自动采集软件进行观测,并可直接接入将来实施的完整安全监测自动化系统内。
6 观测成果
系统于 2013 年 10 月开始实施,11 月投入试运行,现运行正常。采集到的观测数据准确可靠,变化符合坝体在水位及气温影响下的变形规律。
观测成果表明:这次优化设计是成功的,真空激光准直测坝变形系统的单端点改正方法是确实可行的。该方法可降低真空激光系统设计布置与实施的难度,并节约了工程投资。其在吉牛水电站中的成功应用对于其它类似工程具有可靠的借鉴意义。
[专利技术]一种真空激光准直系统端点改正方法”为中水东北勘测设计研究 有 限 责任公司独 家研发和拥 有,[专利号]:201310490010.3。
TV698.1+2
B
1002-0624(2014)11-0004-03
2014-07-10
猜你喜欢
数学物理学报(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
建材发展导向(2021年19期)2021-12-06
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
科学技术创新(2021年7期)2021-03-23
黑龙江水利科技(2020年8期)2021-01-21
中学生数理化·教与学(2019年8期)2019-09-18
传感器世界(2019年12期)2019-02-18
中国工程咨询(2017年9期)2017-01-31
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
