
基于无线通信的养路机械施工人员防碰撞技术研究
2014-03-29 07:38唐玉青李建勇
机电工程 2014年4期
唐玉青,李建勇,王 恒
(北京交通大学 机械与电子控制工程学院,北京 100044)
0 引 言
随着我国铁路里程的不断增加,养路作业也逐渐进入了大型机械化时代[1]。由于大型养路机械的作业速度越来越快,在提高作业效率的同时也带来了碰撞施工人员的风险。以配砟整形车为例,其作为常见的大型养路机械,在养路作业中占据着重要的位置。配砟整形车作业时,在侧犁向外伸出的情况下同时向前运动,由于作业速度较快,可能会碰撞施工人员,从而引发较为严重的安全事故,对国家和人民的生命财产造成损失[2]。一般来说,在作业过程中,司机通过眼睛观察周围作业人员的分布情况并决定是否需要采取刹车、鸣笛等安全措施。然而事实上,由于疲劳驾驶、视线盲区等原因,司机往往难以完全掌握周围施工人员的分布情况,这样在作业时就会存在较大的安全隐患。因此,怎样才能让司机实时掌握周围施工人员的位置状态,从而避免碰撞事故的发生,是研究防碰撞技术时要解决的关键问题。
目前,对于局部区域的人员定位多采用无线定位技术[3-5],该技术通过无线通信的方式获得移动标签到基站的距离等信息,从而推算出移动标签的位置。以线性调频扩频(CSS)无线通信技术[6]为例,移动标签向基站发送Chirp信号,这是一种频率可调的脉冲信号,该信号经过滤波器后,根据其频率变化趋势可以演化成1-0信号。当采用80 MHz带宽时,频谱密度较低,但能够获取较大的通道增益,从而轻松分辨出脉冲信号,这样标签和基站自带的芯片就能够识别出传输信号的发送时间、对应回复信号到达时间,并记录在寄存器中,以供计算传输路径长度,从而获得移动标签到基站的距离。获得距离数据以后,再通过各种定位算法,就可以计算出移动标签的位置了。
常用的基于测距数据的无线定位技术,多是在固定的位置安装一系列基站,对这些基站所围成的区域内部的目标进行定位,这种方式下的定位算法主要有三圆定位法[7]、双曲线法[8]等。三圆定位法,又称三点定位法、三边测量法,其定位原理是以3个基站为圆心,目标到基站的距离为半径作圆,理想状态下,三圆交于一点,这个点便是目标的坐标点。在实际应用中,由于测量误差的存在,3个圆往往难以交于一点,需要通过一定的算法(如取中点等)来估计一个相对理想的位置,作为目标位置的最优解。双曲线法则是利用双曲线上任意一点到焦点的距离差值为定值的特性,分别以两对基站为焦点,利用目标到基站的距离差值为参数,构建两对双曲线,双曲线的交点便是目标的所在位置,由于双曲线的几何特性,一般会有多个交点,还需要通过一定的方法筛选出唯一的正确解。
然而上述的定位算法只适用于对基站内部区域的目标进行定位,对于处于基站外部区域的目标定位效果并不理想。大型养路机械作业时是沿着铁轨不断向前运动的,因此整个定位区域是以车辆为中心的运动区域,这就决定了定位基站只能安装在养路机械上,而定位目标即施工人员则是在基站所围成的区域的外部活动。针对这种情况,本研究基于CSS无线通信技术,利用目标到各基站的距离数据,结合当前各种定位算法的特点,提出一种新的定位算法—曲圆定位法。
1 CSS无线通信测距技术
CSS测距技术通过记录信号在目标与基站之间的传播时间从而计算出二者之间的距离,所得的距离数据也是曲圆定位法的依据,在此有必要对测距过程进行简单解说。本研究基于Nanotron公司的nanoLOC Development kit 2.0开发套件,对整个测距过程具体描述如下。
由于CSS测距是基于无线电传播时间和无线电传播速度来求得距离值的,而无线电信号在空气中以光速传播,测距的关键就是要获得信号的传播时间。信号从发射到接收,整个过程时间段既包括信号从发出端到接收端的传播时间,也包括硬件对信号接收并回复所花费的时间,因为传播时间无法直接获得,只能通过总的过程时间和回复时间来计算得出。
根据整个测距过程中信号传播的次数,主要有两种测距方法:一种是双边对等两次测距法(SDSTWR);另一种是非对等单次测距法(Half SDSTWR)[9]。双边对等两次测距法的测距原理如图1所示。

图1 双边对等两次测距法原理
如图1所示,为了测得节点A、B之间的距离,先是节点A发出一个数据包,在B接收到数据包以后,硬件会对数据进行处理并生成确认数据发送给A,A收到了B发送来的确认数据后,第1个过程完成。从B发送数据给A到A接收并发送确认数据给B再到B再次接收数据,这是第2个过程。其中信号从B返还给A既是第1个过程的后半段,也是第2个过程的前半段。因此这里的“双边”是指测距有两个节点(A和B)参与;“对等”则是指测距过程是对等的,整个过程既包括信号从节点A发出经过B回复后又被A接收这一往返的过程,又包括信号从节点B发出经过A回复后又被B接收这一往返的过程;“两次”是指一次测距包含两个信号往返过程。将信号单次传输距离记为d,则整个测量过程中,产生了4次传输过程4d,以及2次回复等待时间(treplyA,treplyB),所以单次测量距离计算如下式:

由于troundA,troundB,treplyA,treplyB均能够通过基带时钟测量出来,单次信号传输时间、传输距离也能够计算出来。
非对等单次测距法测距过程只包含一次信号的往返过程,相当于只有双边对等两次测距方法的前一个过程,其原理如图2所示。

图2 非对等单次测距法原理
在非对等单次测距法中,距离由下式求得:

式中:troundA—整个过程的时间,treplyB—B的回复时间。
2 曲圆定位法定位原理
利用无线通信的定位技术首先要解决的是基站的布置问题,由于养路机械作业时处于不断运动的状态,定位基站需要布置在养路车的车身上。以配砟整形车为例,国内常见的型号是SPZ-200[10],其尺寸为长13 508 mm,宽3 025 mm,高3 900 mm,据此,基站的布置方式如图3所示,在基站围成的矩形区域中,基站1、2的距离为3 m,2、3的距离为12 m。

图3 基站布置方案1,2,3,4—基站1,2,3,4;5—移动标签;6—信号接收机
曲圆定位算法的流程如图4所示,将养路机械周围的定位区域分成4块,根据所在基站序号记为区域1,2,3,4。当笔者获得了移动标签到基站的距离d1,d2,d3,d4时,首先根据d1和d2大小判断目标处于养路机械的左边还是右边,假设d1<d2,则说明目标位于左侧,再根据d1和d3的大小判断目标处于区域1还是区域3,若d1<d3则目标位于区域1,需要使用d2,d3来进行定位,具体划分准则如表1所示。

表1 区域划分准则
以区域1为例,因为双曲线上的任意点到两个焦点的距离之差是定值[11],可以根据d2,d3的差值求出一条以基站2,3为焦点的双曲线,移动目标就位于这条曲线上:

图4 定位算法流程

同时再根据d2的值求出以基站2为圆心,d2为半径的圆,移动目标同时也存在于这个圆上:

这样只需求出双曲线和圆的交点(一般会出现4个点,分别位于4个区域),再根据预先判断的目标所处区域就可以筛选出正确的定位坐标,曲圆定位法定位原理示意图如图5所示。

图5 曲圆定位法定位原理示意图
在上式中:

式中:l—2、3基站的距离,为12 m。
3 算法的误差分析

由公式(8)得到φ(1)=0.995。
已知正态分布函数的计算公式为:

令t、σ=u,则公式(9)变为:

令x=1,则:

式中:φ(x)—正态分布函数,φ'(x)—标准正态分布函数。
查标准正态分布表,得到σ=0.388,σ2=0.151,即测距误差服从方差值为0.151的正态分布。
由于对目标定位的结果取决于目标到两个基站的距离,定位误差来源于测距误差。首先本研究给出一组定位信息(即目标到基站的距离信息),由此计算出目标的真实位置,然后在这组定位信息上加入服从正态分布的随机数,用于模拟带有误差的测量值,并据此计算出目标的测量位置,将测量位置与真实位置相比较,就可以得到在目前测量条件下曲圆定位法的定位误差了。本研究使用Matlab生成100组数据,其定位结果如图6所示,其中星号表示目标真实位置,空心圆代表的则是目标的测量位置。

图6 定位测试实验样本及实验结果
由图6可以发现,随着定位距离的增加,定位误差也有变大的趋势,考虑到误差变化的这个特点,在对误差进行统计分析时,笔者采用误差对定位距离的比值即相对误差作为分析指标,结果如表2所示。
由表2的结果可以看到,100组数据中最大相对误差不超过10%,平均为3.24%。为了清楚地了解相对定位误差的分布情况,本研究将不同范围的数据统计出来,其直方图如图7表示,可以看出大部分相对定位误差都低于5%,这说明该定位算法在一定的误差允许范围内是有效的。
以及教师的教学能力(36.4%)。对于其他几项则选择较少。排在前三位的因素均与学生有关,这与ESP权威学者的研究结论相符合。Hutchison和Waters指出,ESP课程建设应使课程目标和学习者的需求取得一致[5];Robinson认为,ESP课程实质上是一种目标导向课程,应建立在需求分析基础之上[6]。
4 建立安全判据模型
在获得大型养路机械作业时周围施工人员定位结果后,接下来要判断施工人员所处的安全状态,因为养路机械是沿着铁路线作业,可以预先在铁路线周围划分出安全区域,以便系统迅速判断出目标当前状态。在理想状态下,不考虑定位误差和铁轨曲率的影响,只需要沿铁路线左右划分出5 m的作业区域,在该区域以外认为是安全区域即可。但是实际过程中,由于铁轨曲率及定位误差的存在,为了提高系统的安全可靠性,必须根据误差量扩大潜在危险区域,已知定位误差随着定位距离的增加而增加,在之前的模拟试验中,定位误差率最大为9.83%,平均为3.24%,本研究在此设定将潜在危险区向安全区域延伸10%的距离值,具体如图8所示。

表2 相对误差统计结果

图7 相对误差统计量直方图

图8 安全区域划分
当施工人员进入潜在危险区时,则需要对其状态进行进一步判断,在该区域的施工人员的安全状态包括以下3种情况:
(1)人员距养路车有一定距离,且相对速度为分离的趋势,这属于安全状态;
(2)人员距养路车有一定距离,按当前速度在一段时间后会碰撞,但是有充足的时间进行避险,这属于缓冲状态;
(3)人员距养路车较近,即便减速也会发生碰撞,这属于危险状态。
综上所述,建立施工人员的安全模型,如下式所示:

式中:V—目标相对车的速度,负值表示远离;S—目标到车头的距离,可由定位结果计算得到,而相邻两次S的变化情况可近似算出V;t—司机的反应时间,正常司机的反应时间为0.3 s~1.0 s;a—作业车的制动加速度;Smin—人与车的最短距离,设定为1 m,即二者距离小于1 m等同于发生碰撞。
而t,a,Smin已知,因此,这个安全模型是可行的。
以上3个公式分别代表安全、缓冲、危险3种状态,当目标处于安全状态时,保持继续监测;目标处于缓冲区域时,系统向司机发出警报,提醒司机注意潜在危险;目标处于危险区域时,系统通过扩音器发出警报,一方面提醒施工人员迅速离开危险区域,另一方面提醒司机采取减速措施,为工人避险争取足够的时间,区域划分如图9所示。
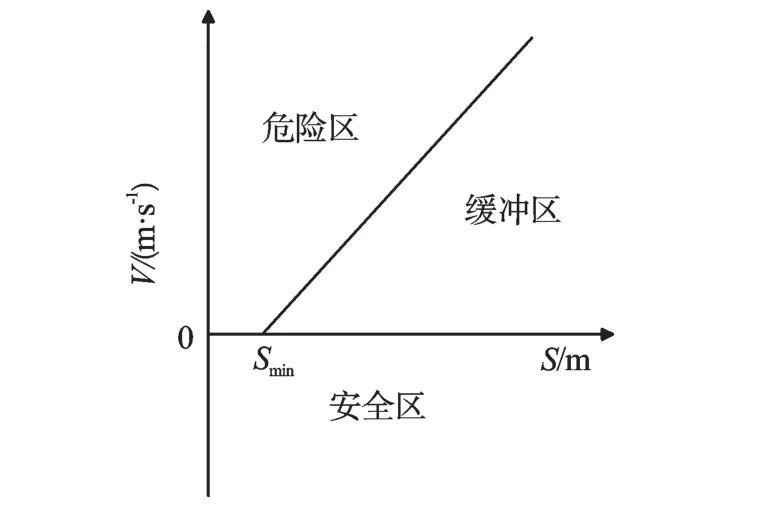
图9 施工人员所处区域判据
5 系统的设计开发
为了实现目标的自动定位、状态判断,以及定位结果的可视化功能,本研究依据曲圆定位算法设计了一个简单的定位软件,使用Matlab自带的GUI功能模块[12]可以较为容易地设计出该定位软件。
软件界面如图10所示,左边是数据运算部分,实现距离参数的输入、运算以及位置坐标的输出等功能;右边是地图显示部分,实现结果的可视化功能。当输入的参数是[6 8 18 20],运行后,系统判断出目标处于区域1,使用8、18为定位参数,计算出并经过坐标变换后输出目标的坐标为(-3.564 68,12.053 8),同时右边的坐标系中显示出目标相对车体的位置,目标处于边界内部,因此显示为图中粗实线,表示处于潜在危险区,提示司机可能会有碰撞危险,需要特别关注。

图10 定位软件主界面及演示
6 结束语
本研究提出了基于CSS无线通信技术的养路机械周围施工人员防碰撞技术,并对该技术中的人员定位、安全状态判断等重点问题进行了研究。针对人员定位问题,本研究在获得了目标到各基站的距离数据的情况下,提出了一种新的定位算法。依靠定位结果,还建立了一个判断人员状态的安全模型并演示了利用软件界面实现定位功能的过程。仿真实验结果表明,该防碰撞技术可以帮助司机实时了解周围人员动态,对避免养路作业时人员碰撞事故的发生具有实用价值。
(References):
[1] 郑中立.我国铁路大型养路机械发展回顾(连载之五)[J].铁道建筑,2004(7):3-6.
[2] 王发灯.配砟车避障系统的设计[J].铁道建筑,2008(1):28.
[3] 谷 静,毛永毅,李明远.无线定位技术[J].西安邮电学院学报,2002,7(3):25-27.
[4] 马 梁,彭 保.一种基于RSSI的无线传感网络安全定位算法[J].兵工自动化,2012,31(3):44-46.
[5] 赖春强,陈利华.基于FLR9G30无线通信系统的通信距离及速率估算[J].兵工自动化,2013,31(10):57-59.
[6] KIM J E,KANG J,KIM D,et al.IEEE 802.15.4a CSS-based localization system for wireless sensor networks[C]// Mobile Adhoc and Sensor Systems,2007.MASS 2007.IEEE Internatonal Conference on.Pisa:[s.n.],2007:1-3.
[7] 王中生,曹 琦.基于ZigBee技术的无线定位研究与实现[J].计算机技术与发展,2010,20(12):189-192.
[8] 陈 健.面向3GPP-LTE终端无线定位的参数估计与定位解算研究[D].成都:成都电子科技大学通信与信息工程学院,2011.
[9] 梁久祯.无线定位系统[M].北京:电子工业出版社,2013.
[10]曹昆山.SPZ-200型双向道床配碴整形车走行系统的匹配分析[J].铁道标准设计,1998(5):46-48.
[11]王益平,王 皓,吴 衡,等.基于到达时差的低功耗声音定位系统[J].机电工程,2013,30(8):1015-1019.
[12]罗华飞.Matlab GUI设计学习手记[M].北京:北京航空航天大学出版社,2009.
猜你喜欢
科学(2020年3期)2020-01-06
布达拉(2019年6期)2019-07-18
北方人(2017年10期)2017-07-03
电子制作(2017年8期)2017-06-05
电子制作(2017年7期)2017-06-05
探索科学(2017年4期)2017-05-04
中国公路(2017年12期)2017-02-06
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
