
VRS模式下流动站获取正常高的方法
2014-04-17 08:56欧阳欣江春发郭垂注
地理空间信息 2014年1期
欧阳欣,江春发,郭垂注
(1.厦门市测绘与基础地理信息中心,福建 厦门361000)
VRS模式下流动站获取正常高的方法
欧阳欣1,江春发1,郭垂注1
(1.厦门市测绘与基础地理信息中心,福建 厦门361000)

对VRS模式下大地高转换为正常高的方法进行了实践和检验,结果证明该方法精度可达3 cm,能有效提高RTK用户的正常高精度和作业效率。
VRS;大地水准面;RTCM;解码
RTK实时测量结果为与CORS基准站相一致的WGS84空间直角坐标(或其他参考框架下的地心坐标),通过转换参数及地方椭球、投影设置,可转换为地方平面直角坐标及大地高,但实际需要的是正常高。李江卫等提出的通过对VRS坐标施加高程方向改正从而直接得到流动站正常高[1]是一种简便有效的方法,本文对该方法进行了探讨和验证。
1 基本原理
因大地水准面连续、均匀[2],且流动站与VRS距离较短,可认为流动站与虚拟参考站具有相同的高程异常。如图1所示,将VRS坐标沿垂线方向平移 ,则各流动站也将在高程方向变化相同的量,从而实现大地高到正常高的转换。
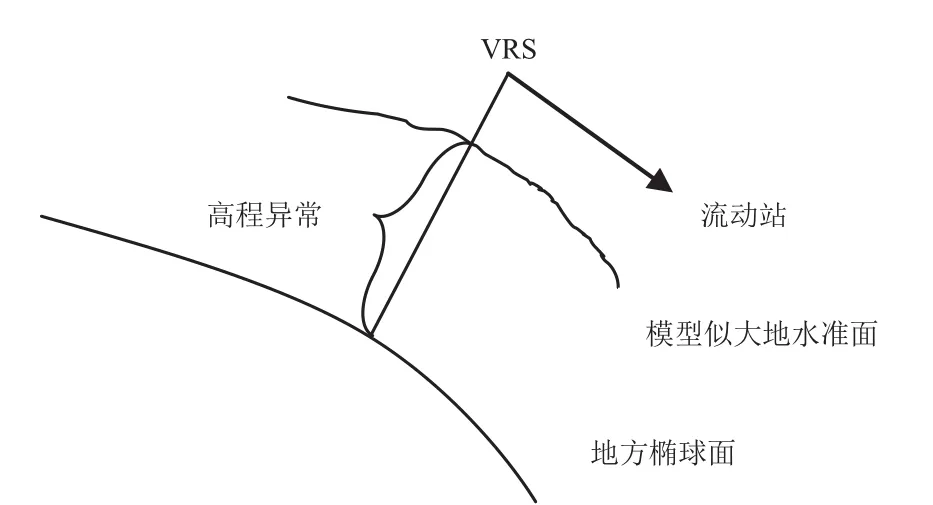
图1 大地高与正常高关系图
2 流动站与CORS服务器的通信
1) 流动站将NMEA格式单点定位坐标发送到服务器;
2) 服务器在该坐标处生成虚拟观测站(值),通过NTRIP协议传送到流动站;
3)流动站实时求解双差模糊度,得到基线向量,由VRS坐标传递得到流动站WGS84坐标,转换得到地方坐标;
4)作业过程中流动站继续发送NMEA格式概略坐标(1~10 s),服务器判断是否需要重新生成虚拟观测站(值),直至作业结束。
3 数据处理过程
原有服务器安装了天宝GPSNET软件,实现对各基准站数据的接收、处理以及虚拟观测值生成和分发等工作。通过加装中间服务器,编写程序模块实现与GSPNET软件通信,对RTCM 2.3格式数据进行解码,提取并修改VRS点坐标,重新编码后通过设定的IP和端口发出,流程见图2。

图2 VRS坐标修改过程图
4 VRS点大地高改变对流动站定位结果的影响
1)VRS点大地高方向变化Δ H,空间直角坐标相应变化[ΔX,ΔY,ΔZ] 。与起算点坐标对基线向量解算的影响类似,VRS点与流动站位置间的基线向量将产生系统偏差。为了使VRS点位置偏差对相对精度的影响不大于1/1 000 000,VRS点坐标偏差不能大于90 m[3,4]。忽略基线向量的变化,即认为流动站与VRS具有相同的[ΔX,ΔY,ΔZ],则流动站处的大地坐标变化为[5]:

各流动站的[B,L]不同,大地坐标变化量也不尽相同,流动站之间的相对位置将发生变化。由于仅将VRS大地高移动,且与流动站距离很近,[dB,dL]变化可忽略,流动站相应地在大地高方向变化dH。
2)七参数转换前后坐标的变化。WGS84坐标系下大地高方向变化为Δ H84,经七参数转换后大地高方向变化Δ H54,两者之间的关系为:
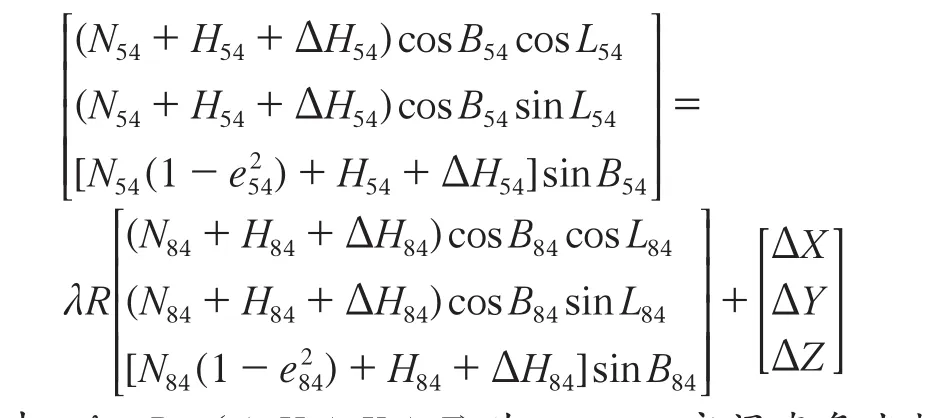
式中,λ、R、(Δ X,Δ Y,Δ Z)为WGS84空间直角坐标到地方空间直角坐标的转换参数;N为卯酉圈曲率半径,可求得Δ H54=0.999 908 88Δ H84[1]。表1采用实测RTK数据,运用徕卡LGO软件模拟坐标修改过程。

表1 VRS大地高变化对流动站的影响表/ m
从表1可知,VRS处高程的变化基本只影响流动站的高程值,而要将VRS与流动站高程异常差值控制在cm级,需将两者距离限制在一定范围内。
5 实测数据检验
厦门市连续运行参考站系统采用上述方法向流动站发送高程异常信息。为评价该系统与精化区域似大地水准面联合应用测量正常高的精度,对覆盖厦门市的29个联测二等水准的B级GPS点进行了RTK检测。流动站型号为Leica1250,差分数据格式为RTCM2.3,测量时间60 s。RTK实测高程与水准高程差值见表2。
由于福建地势的特殊性,有1/3以上的测试点位于山区。从表2可知,RTK正常高精度分布较均匀。笔者之前采用七参数转换法获取正常高精度约为10 cm,与之相比采用该方法精度有了很大提升。
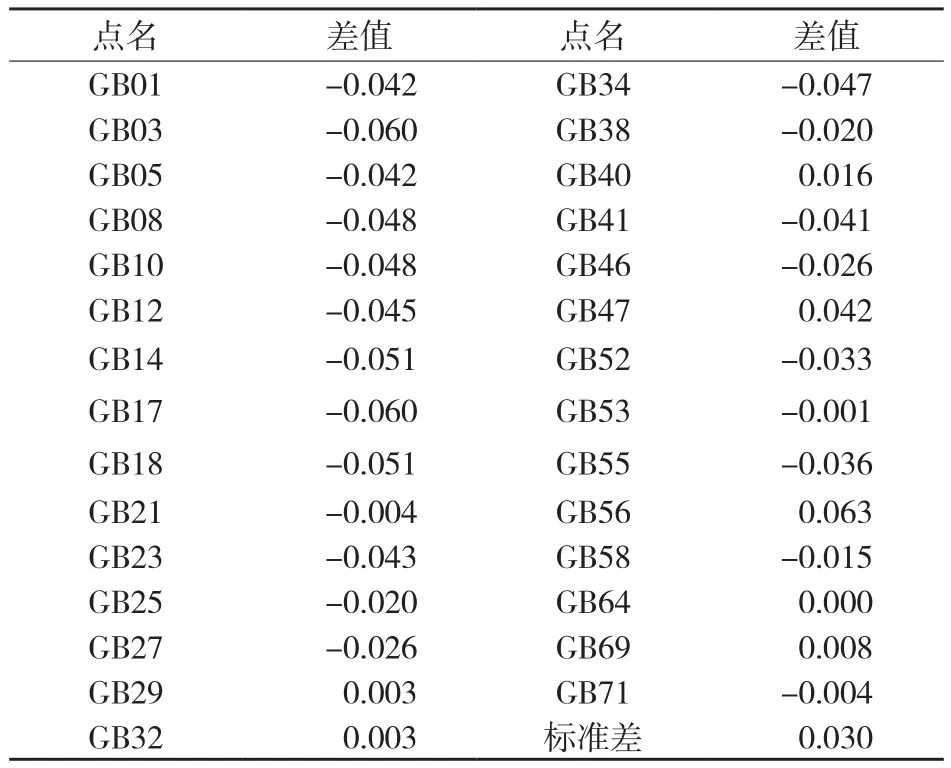
表2 RTK高程与水准高程差值表/cm
6 结 语
VRS处的高程异常正确代表周围流动站的高程异常是该方法实现的先决条件, VRS至流动站的距离越远差异越大,故当流动站与VRS距离超过500 m时,将重新生成参考站。如果在实时测量中要获得准确的高程信息,需有好的观测条件(PDOP值、电离层对高程影响很大)[6],且最好重新生成虚拟参考站。
该方法的优点在于:无需为流动站用户增加额外设备或模块,无需顾及RTK用户仪器间的差异,只需增加1台中间服务器并开发相应的软件,节省了成本并实现了对水准面精化成果的保密。其缺点为:由于高程异常内插和虚拟观测值生成都在服务器上进行,受距离限制,服务器需要更频繁地重新生成VRS观测站(值)[7],在一定程度上加重了服务器负担。同时WGS84下测量的高程不再是大地高,某种程度上破坏了RTK空间测量的连续一致性,但这一特点也间接保护了基准站到地方坐标的转换参数。
[1] 李江卫,刘经南,肖建华,等.基于VRS系统的精密正常高实时测量[J].大地测量与地球动力学,2010,30(6):86-90
[2] 宁津生,罗志才,李建成. 我国省市级大地水准面精化的现状和技术模式[J].大地测量与地球动力学,2004,24(1):4-8
[3] 刘立龙,唐诗华,文鸿雁.GPS RMBS起算点偏差对定位影响的研究[J].测绘科学,2008,33(2):60-61
[4] 蔡宏翔.起始点位置偏差对精密GPS差分定位影响的研究[J].中国空间科学技术,1999(1):26-28
[5] 孔祥元.控制测量学[M].武汉:武汉大学出版社,2002
[6] 霍夫曼•韦伦霍夫,利希特内格尔•瓦斯勒.全球卫星导航系统GPS,GLONASS,Galileo及其他系统[M].北京:测绘出版社,2009
[7] 郭际明,张绍成,孟祥广.VRS与FKP定位模式的研究与比较[J].测绘通报,2011(1):4-5
P223.0
B
1672-4623(2014)01-0140-02
10.11709/j.issn.1672-4623.2014.01.048
欧阳欣,工程师,主要从事工程测量及CORS应用研究。
2012-08-06。
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
神州·下旬刊(2020年5期)2020-10-21
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
中国高新技术企业(2015年15期)2015-05-04
商品与质量·消费研究(2013年6期)2013-08-06
城市建设理论研究(2012年6期)2012-04-10
