前照条件下LAMOST焦面板光纤单元定位精度检测系统设计
2014-05-13 02:12汪梦欣陈笑然罗阿理宋轶晗刘力力
天文研究与技术 2014年2期
汪梦欣,陈笑然,罗阿理,宋轶晗,刘力力
(1.中国科学院国家天文台,北京 100012;2.中国科学院微电子研究所,北京 100029;3.中国科学技术大学,安徽 合肥 230026)
前照条件下LAMOST焦面板光纤单元定位精度检测系统设计
汪梦欣1,陈笑然2,罗阿理1,宋轶晗1,刘力力3
(1.中国科学院国家天文台,北京 100012;2.中国科学院微电子研究所,北京 100029;3.中国科学技术大学,安徽 合肥 230026)
大天区面积多目标光纤光谱望远镜(Large Sky Area Multi-object Optical Spectroscopic Telescope,LAMOST)是目前国际上口径最大、视场最宽、光谱获取率最高的大型施密特望远镜,通过借助并行可控式双回转光纤定位系统,其焦面系统上的4 000根光纤可以在数分钟内按预定天体坐标快速精确地对准各自观测目标并进行精调。望远镜观测时每一个光纤单元定位情况的好坏直接决定接收天体光谱的质量,然而目前针对光纤定位精度情况仅有的信息就是定位时光纤单元步进电机驱动情况的反馈,是一个内部信息,并不全面,无法给出每一个光纤单元的实际定位精度情况。因此需要搭建一个可用于LAMOST现场的检测系统,在望远镜观测间隙,在前置光源照明条件下,可以第一时间获取焦面板光纤单元定位图像,快速分析之后,检测出定位误差较大的光纤单元,由此决定进一步观测处理措施,以保证观测光谱的有效性和准确率。
LAMOST;摄影测量;光纤头目标点提取;最小二乘拟合;四次多项式拟合
CN53-1189/P ISSN1672-7673
大天区面积多目标光纤光谱天文望远镜(Large Sky Area Multi-object Optical Spectroscopic Telescope,LAMOST)是一台卧式中星仪式主动改正板反射施密特望远镜,作为国家大科学工程项目成功地解决了大口径兼大视场望远镜的设计难题。它的两项关键性技术,一是拼接镜面和薄镜面的主动光学技术,二是焦面板上并行可控的光纤单元定位系统[1-2],在建设过程中面临不少技术上的挑战。在焦面系统中,光纤单元的定位精度直接决定接收的天体光谱质量的好坏,由于存在着控制、机械加工、安装、工作环境改变等可能引起的误差,因此对光纤定位精度的检测是LAMOST系统中一个重要问题。
1 焦面板光纤定位检测的测量需求
LAMOST焦面是一个线直径1.75 m、曲率半径约19.88 m的球冠面,其上分布4 000根光纤,在观测时,每一根光纤对准一颗星像,光纤定位系统的具体目标是在焦面范围内,使每一根光纤端面基本满足下面的条件[1-2]:定位精度达到40 μm(约0.4″);每次改变观测天区时,要在20 min内完成4 000根光纤的重新定位;光纤的入射光方向上不得有任何遮挡;光纤在焦向上的定位无盲区;定位过程光纤的指向保持不变;定位时4 000根光纤之间避免相互碰撞等。文[3]作者提出了基于分区思想的并行可控式双回转光纤定位方案,如图1,在直径1.75 m的焦面板上按蜂窝状布置4 000个光纤定位单元,每个定位单元是一个双回转机构,如图2,在其上安装一根光纤,光纤单元的活动范围是33 mm的圆区域,由两个步进电机通过两级蜗轮蜗杆减速器驱动,相邻两根光纤间中心距离为25.6 mm,而单根光纤的有效覆盖区是直径33 mm的圆,这样相邻光纤产生一定的重叠区,既保证了观测没有盲区,也能提高观测效率。
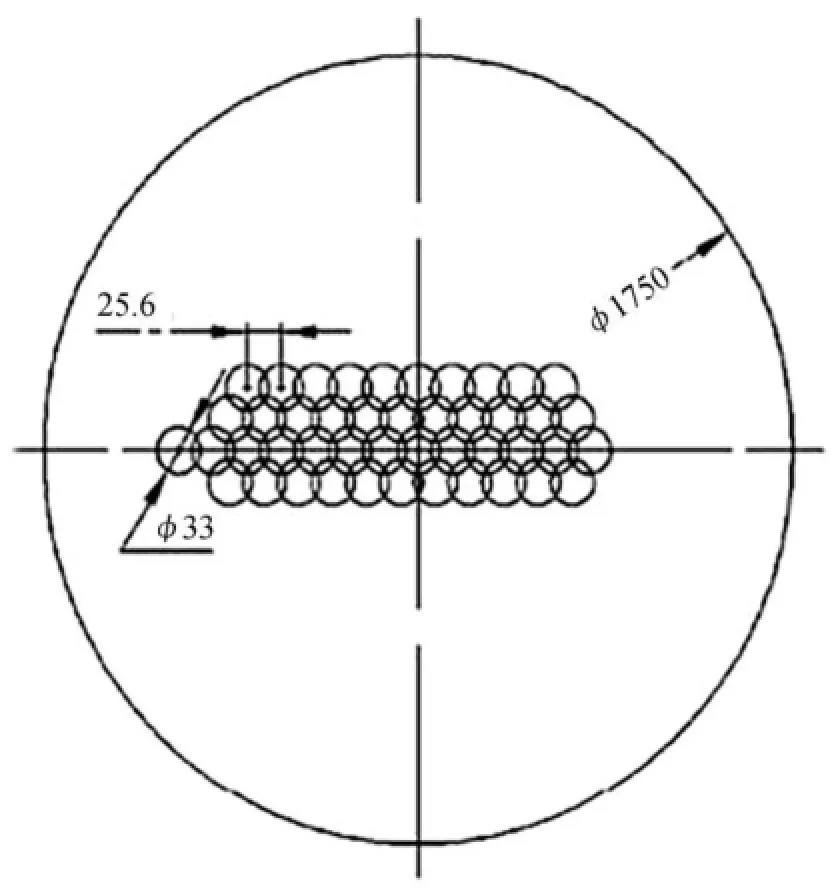
图1 LAMOST焦面板定位单元分布图Fig.1 The distribution of optical-fiber units on the LAMSOT focal plane
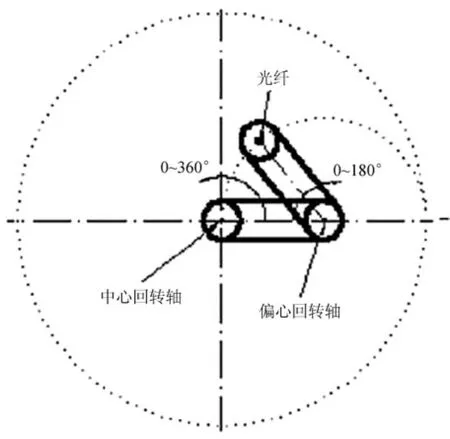
图2 双回转光纤定位单元原理图Fig.2 A schematic diagram of double-revolving positioning of an optical-fiber unit
目前在LAMOST现场,对每一次观测时焦面板上光纤单元的定位情况,存在一个内部反馈信息,这个信息主要是针对光纤单元双回转结构中的步进电机驱动情况,根据此反馈信息,在后续光谱数据处理中忽略这些定位时电机驱动错误的光纤单元采集的光谱,但从目前正式巡天采集的天体光谱情况分析,由于信噪比很低而未能被释放的光谱大约占到采集光谱的20%以上,这其中不可避免存在着由于光纤单元定位错误造成的无效光谱。因此,有必要设计一套光纤定位精度实时检测系统,它能够实现在望远镜观测时,快速准确地对焦面板上的光纤单元定位精度进行全面检测,做出反馈信息。
综合LAMOST焦面板的光纤定位系统设计要求,可知其具有以下特点:分布区域大、目标多、目标尺寸微小和球冠面分布(需要三维坐标)[4]。因此,焦面上光纤位置检测可以定义为大尺度下的三维坐标测量。可以实现大尺度三维坐标检测的方法有许多种,如经纬仪测量系统、激光跟踪测量系统、激光扫描测量系统、近景摄影测量方法等,由于检测原理的不同,它们所能达到的测量精度也不相同。LAMOST光纤端面是一个微小的可移动平面,这样的特点要求其位置检测是非接触式的;在直径1.75 m范围内分布4 000根光纤,这是目标点数量巨大且分布密集的测量;LAMOST要求定位时间小于20 min,则检测时间应当在数分钟以内。而激光跟踪测量系统是接触式测量[5],经纬仪测量系统[6]由于是逐点测量,测速很慢,这些方法都无法满足LAMOST的要求,因此检测系统考虑目前已被各个领域广泛使用的近景摄影测量法[7],这种测量法是摄影测量的一个分支,通常指测量范围小于100 m、像机布设在物体附近的摄影测量,它具有如下优点:可以瞬间获取被测物体大量物理信息和几何信息,适用于多目标检测;非接触性测量,不伤及被测目标,不干扰被测物自然状态;测量速度快,实时性好,可以看出这些特点恰好能符合LAMOST现场的焦面板光纤定位检测要求。图3给出了系统设计的大框架,检测系统的输入为望远镜观测时摄影系统拍摄的焦面板光纤单元图像以及相应的光纤定位理论坐标值,系统的输出即为检测出的焦面板上定位错误的光纤单元编号。
2 LAMOST焦面系统光纤检测系统的搭建
结合LAMOST现场环境,在前期试验过程中,摄影测量装置搭建结构如图4。用于图像采集的CCD设备搭建在距焦面板20 m远处Mb下面,在Mb下面的平地上焊接4个机械可调支架,以便于安装支撑CCD相机,由于在望远镜观测过程中,现场无光源,因此在焦面板前的升降机上放置LED面光源,以尽量使拍摄到的焦面板图像灰度均匀,利于后续处理。目前在现场试验时,采用的是4 096× 4 096像素的SBIG(Santa Barbara Imaging Group)CCD相机,可供选择的镜头为800 mm和300 mm定焦头,搭配800 mm镜头时,一次成像可以拍摄大约1/4个焦面板范围,搭配300 mm镜头时,一次成像可以拍摄的范围为整个焦面板区域。图5和图6分别给出了CCD相机搭配800 mm和300 mm定焦头时拍摄的焦面板光纤定位图像示例。

图3 检测系统设计框架Fig.3 The design for the framework of the detection system
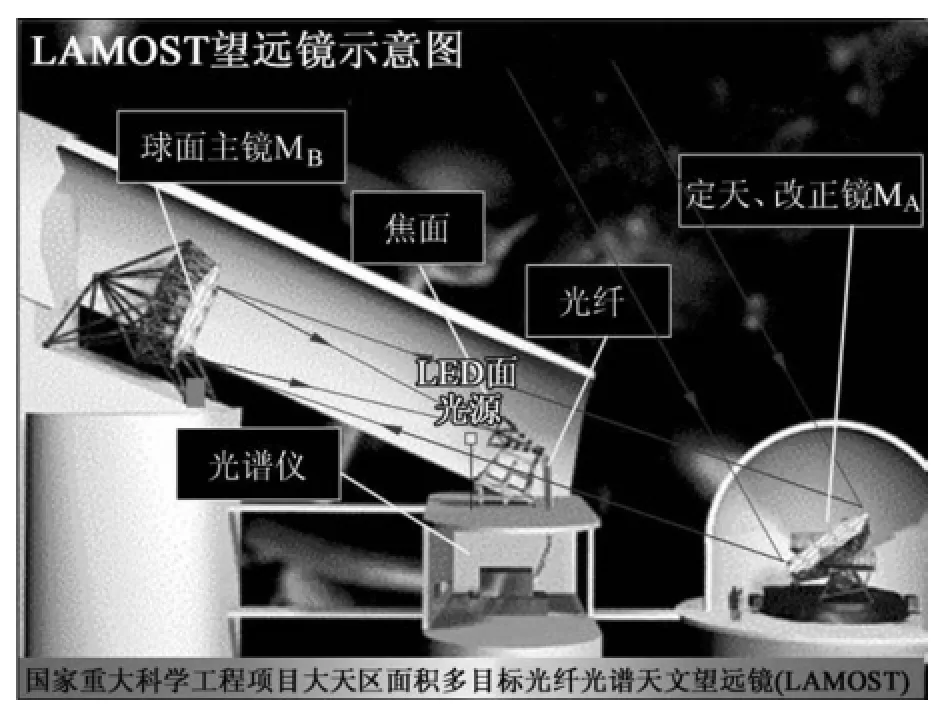
图4 LAMOST现场试验设备搭建示意图Fig.4 A schematic diagram of the on-site test for the LAMOST

图5 800 mm镜头拍摄图像Fig.5 An image recorded by using the 800mm camera

图6 300 mm镜头拍摄图像Fig.6 An image recorded by using the 300mm camera
2.1 图像上光纤头目标点坐标确定
为了从拍摄的图像中挖掘光纤单元定位精度信息,第1步必须能够从图像上获取光纤头的坐标位置。图7展示了一个光纤单元走位时的拍摄放大图,光纤头放置在陶瓷头内部,在光源照射下,圆形陶瓷头区域由于反光性强,其像素灰度值明显高于周围区域灰度值(图7圆圈标注),光纤头位于陶瓷头中间位置,可以近似认为圆斑的中心点坐标代表光纤头在图像上的位置坐标。通过一系列处理,主要包括图像背景去除、细节增强、二值化处理、区域面积大小、离心率、固靠性限制等处理,确定光纤头坐标位置。在提取光纤头坐标点的处理中,采用针对拍摄图像的分块处理方法,在拍摄过程,由于目前拍摄光源不理想等原因,会引来陶瓷头像斑成像的形变以及该区域与相邻区域图像像素饱和等情况出现(如图8),这些因素会引入提取目标点坐标的误差,考虑到图像上同一小块区域的目标成像的形变具有一致性,因此在处理过程中对图像进行分块处理,同一局部区域提取的光纤头目标点相对其真正光纤点坐标,其误差具备一致性,后续处理在计算像物面间映射参数时也会用到这组提取的光纤头目标点集,从而使推导的像面映射点的理论坐标也带有相应误差,由于检测最终是以理论坐标像面映射点和提取的光纤头目标点间的距离差作为光纤走位是否正确的判断标准,因此采用图像分块处理方式,可使此项误差在一定程度上被抵消。图8显示了光纤头目标点提取的实验结果(局部放大图)。

图7 光纤单元成像放大图Fig.7 An amplified view of an optical-fiber unit
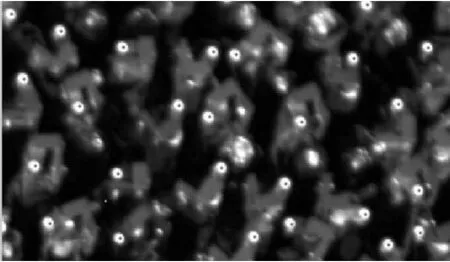
图8 提取的光纤头坐标位置标注图(局部放大图)Fig.8 A graph marking automatically extracted coordinates of ends of optical fibers in a limited region
2.2 焦面板像物面间的映射
在提取光纤头目标点像素坐标信息后,需要确定和每个光纤头目标点相应的光纤单元编号,从而实现像物面间的映射,进而判断每个单元的光纤定位是否准确。此处采用了两步估计,第1步利用相机外部参数估计图像上光纤头目标点其相应的单元编号;第2步在此基础上,将物面目标点与像面目标点间的映射关系用n次多项式拟合[8],通过分析摄像机标定误差可知,多项式次数越大,物面目标点与像面目标点之间的映射关系更为精确。本文采用的是4次多项式摄像机标定模型。
第1步中,主要求取CCD相机外部参数,包括5个值c1、c2、c3、c4、c5,其中c1、c2表示相应的CCD相机的缩放参数;c3、c4代表光点中心偏移值;c5表示像物面间的相对旋转角度。映射面之间的函数关系可表示如(1)式,p表示某目标点图像像素坐标;f表示该点对应的物面坐标位置。

在此基础上,选取图像上n(n≥4)个光纤头目标点坐标和其相应物面坐标作为拟合数据,通过非线性最小二乘拟合[9],设定参数初始值,迭代得到最终外部参数。利用5个外部参数,粗略匹配图像上每个提取的光纤头目标点其相应的光纤单元编号,这样就得到了图像上光纤头目标点点集坐标和相应物面理论点集坐标。像物面映射的第2步即利用这组点集坐标,用4次多项式拟合两者映射关系。

(2)式中,多项式模型参数为[a1,…,a15,b1,…,b15],其中a1、b1相当于目标点的中心偏移值;a2、b3相当于CCD相机的缩放参数;其余模型参数为标定结果修正参数,即相当于摄像机部分外部参数和内部参数[10];(x,y)为像面目标点位置坐标;(X0,Y0)为目标点相应的光纤单元物面坐标值。由于焦面坐标系为球面坐标系,CCD相机外部参数和内部参数都间接与(x,y)有关系,因此通过30个模型参数进行拟合计算,可以有效地降低CCD摄像机视场畸变、球冠状焦面和架设CCD倾斜角度对标定结果的影响。利用最小二乘原理,通过最小化误差的平方和找到这组数据的最佳函数匹配[11],求出从像面到物面映射的30个系数值,利用这些系数计算出图像上每个光纤头目标点相应的物面坐标值,与已知的光纤定位理论坐标值进行匹配,最终精确确定图像上提取的光纤头其相应的光纤单元编号。
2.3 检测定位错误光纤单元
此处仍然利用4次多项式拟合从焦面板物面到像面的映射关系,在每一次得到映射系数之后,利用已知的定位光纤理论坐标值反推出其在图像上对应的像素坐标值,计算每对映射点间的误差,记录并剔除误差在2.5倍标准差之外(此处的误差标准可以根据具体情况设定)的映射点,重新映射,得到新的映射系数,如此循环,直到最终剩余的每对映射点间的误差都在2.5倍标准差之内,记录下的剔除点就是与理论坐标值相差较大的定位光纤单元。整个检测系统的处理流程如图9。
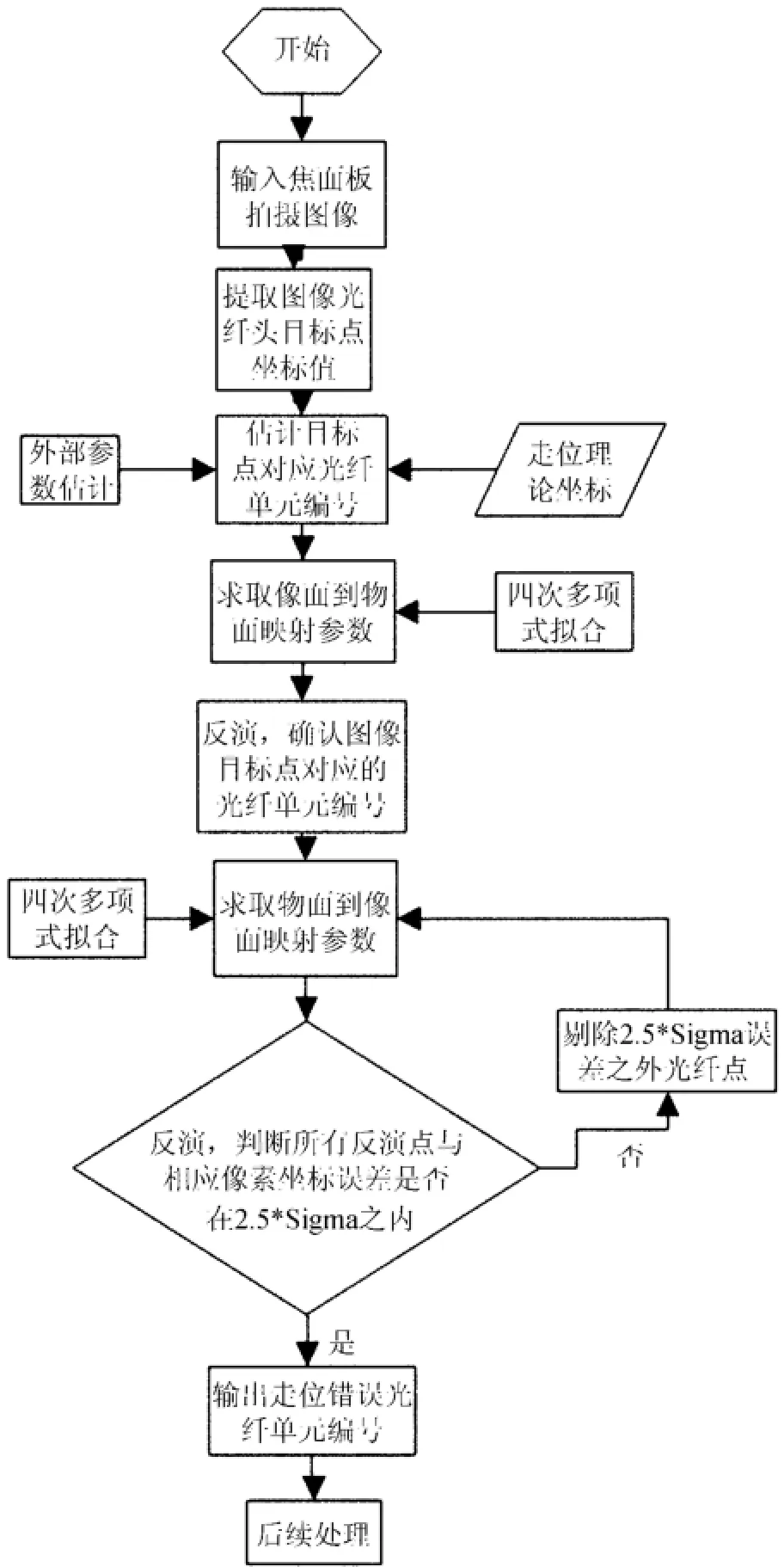
图9 检测系统处理流程图Fig.9 A flowchart of the detection system
3 结果与分析
此处选取2013年5月和8月在LAMOST现场拍摄的两幅焦面板光纤单元图像做处理,结果如下,图10为5月试验时CCD相机搭配800 mm镜头拍摄的图像,成像区域约1/4个焦面板大小(范围集中在焦面板三四象限中间),图上标注了检测的定位错误光纤单元在焦面板上的分布。对于定位正确的光纤单元,其提取的亮点坐标和相应理论像素坐标,之间的误差均值为1.4个像素左右(约2.8″),可检测出误差值在3.4个像素(约6.8″)之上的光纤单元,此精度下检测的定位错误光纤单元所占比例为8.2%。
图11为8月试验时CCD相机搭配300 mm镜头拍摄的图像,成像范围为整个焦面板区域,其上标注了检测的定位错误光纤单元在焦面板上的分布。在这种拍摄条件下,针对定位正确的光纤单元,其在图像上提取的目标点坐标和相应理论像素坐标间的误差,均值为0.6个像素左右(约3.6″),可检测出误差值在1.7个像素(约10″)之上的光纤单元,此精度下检测的定位错误光纤单元所占比例为2.6%。因为望远镜在6月更换过一批约300根质量不好的光纤,所以针对8月拍摄图像处理的实验结果,检测的定位错误光纤单元所占比例明显降低。
为了进一步验证检测算法的有效性和可靠性,选取5月试验时拍摄的一组图像做处理,这组图像是在同一理论定位坐标输入下,拍摄的前后两次走位的光纤单元,图12标注了检测的定位错误光纤单元在焦面板上的分布,从图上可以看出,检测的定位错误光纤单元分布具有一定的相似性,进行定量分析可知,两次检测确定的定位错误光纤单元编号一致的重合率为68%,图13给出了同一特定光纤单元(图中圈标注),在同一定位目标输入下,前后两次的不同走位结果,在图13(a)中此光纤单元定位正确,未被检测出来,而在图13(b)中此单元未按照理论目标定位,被确定为定位错误光纤单元,图中表示按照理论坐标推算出的光纤头图像定位位置,代表实际走位情况下提取的光纤头目标点位置,由处理结果可知光纤单元的错误走位具有一定的重复性和随机性。
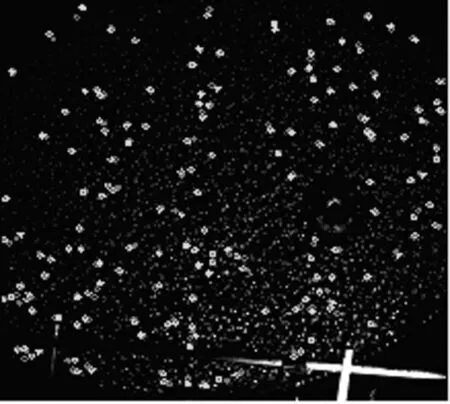
图10 5月拍摄图像处理结果Fig.10 An image obtained in May after the processing
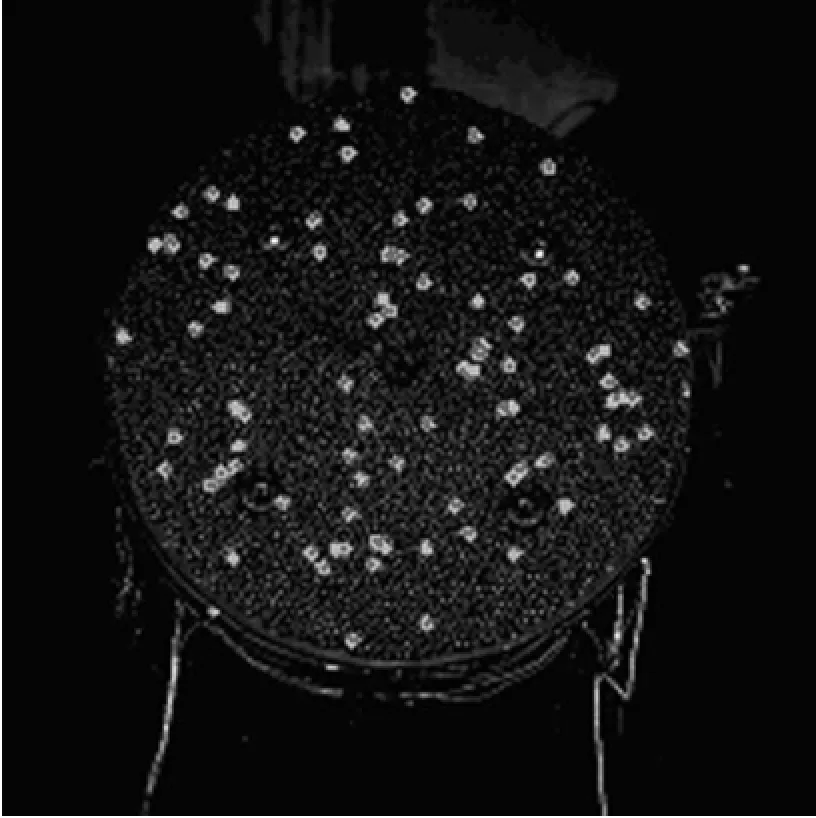
图11 8月拍摄图像处理结果Fig.11 An image obtained in August after the processing
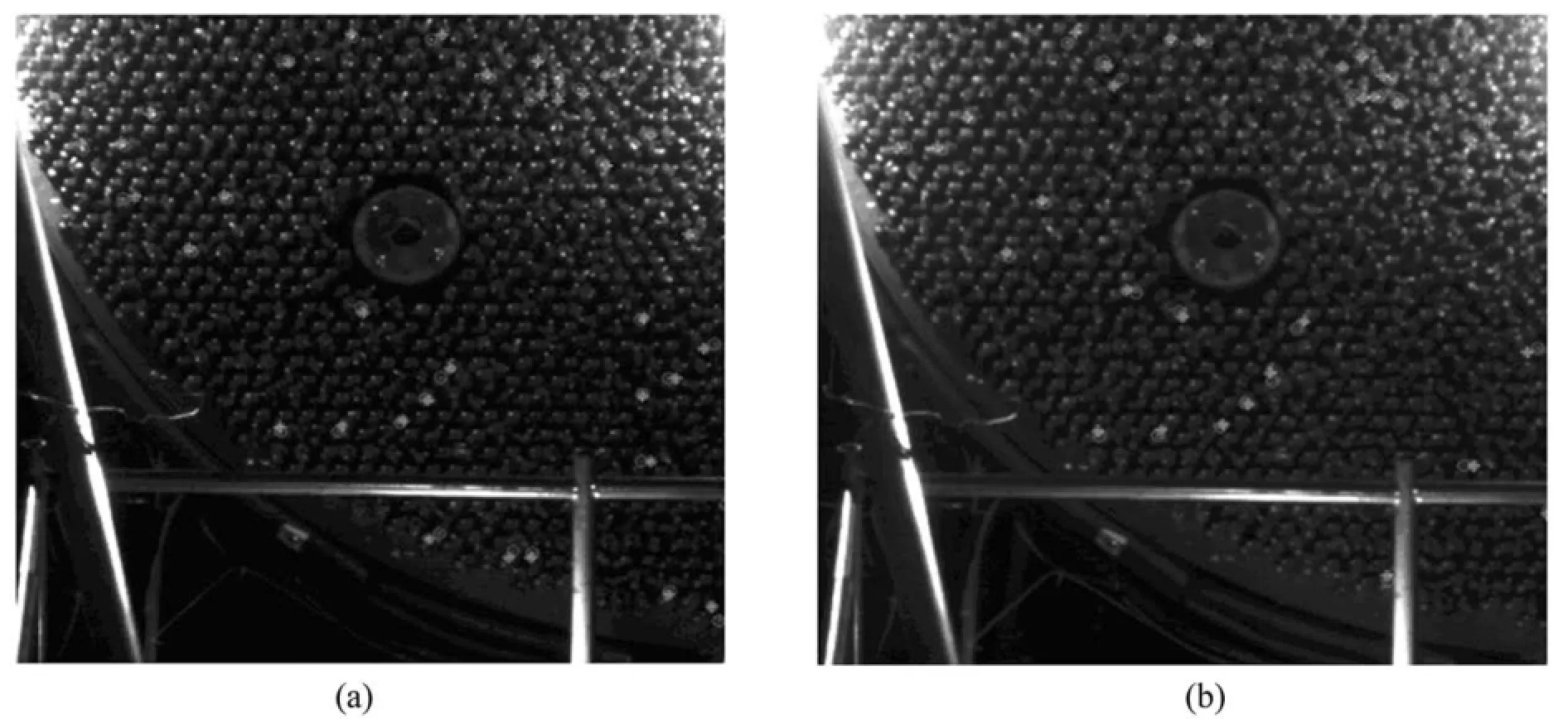
图12 同一理论定位坐标输入下两次走位光纤单元图像的检测结果(局部图)Fig.12 Two images for the same optical-fiber units(which are not all)but under two occasions,respectively.The images were taken after processing adjustments with the same theoretical positioning-coordinate inputs
4 结 论

图13 相同理论定位坐标输入下同一光纤单元的定位检测Fig.13 Two images for one optical-fiber unit but under two occasions,respectively.The images were taken after processing adjustments with the same theoretical positioning-coordinate inputs
在LAMOST现场借助前置照明光源和CCD设备,在观测时,采集走位完毕的焦面板光纤单元图像,用文中设计的这套系统对图像进行分析,可检测出定位误差约7″以上的错误光纤单元,尽管这个精度并未达到LAMOST系统对光纤单元定位的精度要求,但仍能快速地确定部分走位误差较大的光纤单元编号,为下一步的观测处理流程或光谱数据处理提供可靠信息,具备一定实用性。在目前的检测系统中,误差主要是由光纤头目标点提取误差和映射过程中拟合误差引入的,在后续的实际检测系统搭建时,随着后期实验环境(如光源设备)、图像采集设备参数、搭建方式等方面的改善,采集的图像质量会提高,检测系统的精度也会有很大程度的改进。这个精度并未达到LAMOST系统对光纤单元定位的精度要求,但仍能快速地确定部分走位误差较大的光纤单元编号,为下一步的观测处理流程或光谱数据处理提供可靠信息,具备一定实用性。
[1] 陈海波,张素霞,金建锋,等.LAMOST焦面板及其支撑结构的设计与分析[J].中国科学技术大学学报,2007,37(6):601-605.
Chen Haibo,Zhang Suxia,Jin Jianfeng,et al.Optimization design of LAMOST focal plate and its support structure[J].Journal of University of Science and Technology of China,2007,37(6): 601-605.
[2] 邢晓正,胡红专,杜华生,等.用于LAMOST的并行可控式光纤定位系统[J].中国科学技术大学学报,1997,27(4):120-123.
Xing Xiaozheng,Hu Hongzhuan,Du Huasheng,et al.A parallel controllable optical fiber positioning system for LAMOST[J].Journal of University of Science and Technology of China,1997,27(4):120-123.
[3] 胡红专,邢晓正,李为民,等.双回转光纤定位单元装置[J].中国科学技术大学学报,2000,30(6):78-81.
Hu Hongzhuan,Xing Xiaozheng,Li Weimin,et al.Double revolving optical fiber positioning unit device[J].Journal of University of Science and Technology of China,2000,30(6):78-81.
[4] 中国科学技术大学焦面光纤定位研究组.LAMOST焦面光纤定位系统研制报告[R].2003.2.
[5] K Lau R,Hocken W C,Haight.Automatic laser tracking interferometer system for robot metrology [J].Precision Engineering,1986,8(1):3-8.
[6] Wendt.Development of test and calibration for automated theodolite system in production metrology [R].PTB Germany,1996.
[7] 冯文濒.近景摄影测量[M].武汉:武汉大学出版社,2002.
[8] Tsai R Y.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off the shelf TV camera and lenses[J].IEEE Journal of Robotics and Automation,1987,RA 23(4):323-344.
[9] 陈宝林.最优化理论与方法[M].北京:清华大学出版社,1989.
[10] 滕勇,金熠,胡红专,等.单个CCD摄像机大视场测量方法[J].机械与电子,2006(12): 20-23.
Teng Yong,Jin Yi,Hu Hongzhuan,et al.Single CCD camera large view field measurement system[J].Machinery&Electronics,2006(12):20-23.
[11] 邹益民,汪渤.一种基于最小二乘的不完整椭圆拟合算法[J].仪器仪表学报,2006,27 (7):808-812.
Zou Yimin,Wang Bo.Fragmental ellipse fitting based on least square algorithm[J].Chinese Journal of Scientific Instrument,2006,27(7):808-812.
Design of a System for Measuring Positioning Accuracies of Optical-Fiber Units on the LAMOST Focal Plane Using Front Light Sources
Wang Mengxin1,Chen Xiaoran2,Luo Ali1,Song Yihan1,Liu Lili3
(1.National Astronomical Observatories,Chinese Academy of Sciences,Beijing 100012,China,Email:mxwang@nao.cas.cn;2.Institute of Microelectronics of the Chinese Academy of Sciences,Beijing 100029,China;3.University of Science and Technology of China,Hefei 230026,China)
The Large Sky Area Multi-Object Fiber Spectroscopic Telescope(LAMOST)is an innovative reflection Schmidt telescope.It is designed to have a spectrum acquisition rate as high as several tens of thousands of spectra per night.By using the technique of controllable double-revolving positioning of optical fibers,the LAMOST can reconfigure and fine adjust optical fibers to accurately match directions to objects in minutes.During an observation period,the positioning accuracy of an optical-fiber unit has a major impact on the quality of a spectrum acquired through the unit.Currently,the only retrievable real-time information for positioning accuracies of optical fibers is the feedback about conditions of the driving stepper motor.Such information is incomplete and indirect.It cannot reflect the actual position of an optical-fiber unit.We design a novel system to measure real-time optical-fiber positioning accuracies by taking into considerations the on-site environment of the LAMOST.During observaton intervals,the system records real-time images of positions of optical-fiber units on the LAMOST focal plane using front light sources.It quickly identifies optical-fiber units of relatively large positioning errors with certain analysis,allowing for appropriate adjustments in observation procedures.The system can be integrated into the existing observation and control systems.The system can provide complete and effective information about positions of optical-fiber units on the LAMOST focal plane. Based on information retrieved through the system observation assistants can properly adjust their observation strategies to ensure acquried spectra to be sufficiently accurate.Information provided by the system can also indicate the quality of the acquired spectra,which increases the efficiency of processing spectra.
LAMOST;Photogrammetry;Extraction of positions of ends of optical fibers;Least-squares fitting;Quartic regression
P231.5
A
1672-7673(2014)02-0157-08
2013-11-05;
2013-11-21
汪梦欣,女,硕士.研究方向:数据处理、图像处理.Email:mxwang@nao.cas.cn
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
石材(2020年7期)2020-08-24
家庭影院技术(2020年1期)2020-06-24
红领巾·萌芽(2019年8期)2019-08-27
模具制造(2019年4期)2019-06-24
家庭影院技术(2019年4期)2019-04-17
家庭影院技术(2018年9期)2018-11-02
电子制作(2017年13期)2017-12-15
中国与非洲(法文版)(2017年10期)2017-11-23
摄影之友(影像视觉)(2017年1期)2017-07-18