广义互相关时延估计声定位算法研究
2014-05-17 00:34景思源冯西安张亚辉
声学技术 2014年5期
景思源,冯西安,张亚辉
(1. 西北工业大学航海学院,陕西西安 710072,2. 中国华阴兵器试验中心,陕西华阴 714200)
0 引 言
上世纪 80年代开始,美国人率先起步,运用人工智能和微电子技术研制出具有战场侦测、目标定位跟踪和敌我识别等综合作战能力的声探测系统,随后各式反坦克雷、反直升机雷等多种自动预警雷应运而生,这些雷都可通过声音信号捕获目标,测定速度和方位。目前,其他欧美国家单兵作战系统中也大多包含了声定位技术装备[1,2],如加拿大的GUARDIAN系统可定位狙击手开火方向及俯仰角,英国的 HALO系统可实现火炮的声定位等等,主要是利用被动声测定技术来探测炮兵阵地、狙击手位置、弹着点位置和炸点位置等。
在探测靠近地面目标时雷达和红外成像技术都会严重受到地面杂波和环境的影响,而声波探测技术是根据目标发射、飞行及落地过程中所发出的声信号对其定位,这种技术的优点是不易受背景干扰和天气影响,监测范围大,精度较高,成本低廉、安全性好、方便快捷等。
我国在低空声探测技术方面的研究现在仍处于初级阶段,技术相对不够成熟,但民用声探测和军用军事目标定位都有一定的需求。因此,研究声探测定位技术及声探测系统在靶场测试、空中目标定位和跟踪、地面目标监测中的应用等都具有非常重要的意义。
目前有很多用于低空目标定位阵列,例如圆锥阵[3],五点阵等等,本文针对地面目标噪声大、干扰强的特点,利用高精度时延估计[4]算法,采取平面四点阵这一隐蔽性较强的探测技术进行目标声定位,在模拟高背景噪声的情况下进行滤波降噪处理,最终用广义互相关法[5,6]进行时延估计并定位,并与只是降噪处理来定位的方法进行比较。最终得到结论,广义互相关法在高背景噪声且目标声强度低、持续时间短的情况下能得到更高精度的时延差,目标定位精度也有显著提高。
1 平面四点阵声定位原理
地面布阵的显著优点是容易组成大靶面,部件的组装、拆卸容易,便于携带和运输,四点阵布阵方便,利于数据采集,因此选择在地面上按正方形四个顶点位置对称地安置四个传声器,就构成了四点声定位阵,四个阵元相邻间隔由实际测试要求而定,大致为600~1200 m。
如图1所示,位于正方形四个顶点布置四个声接收器,根据点阵接收物体所发声音的时延差来确定落地弹丸坐标。
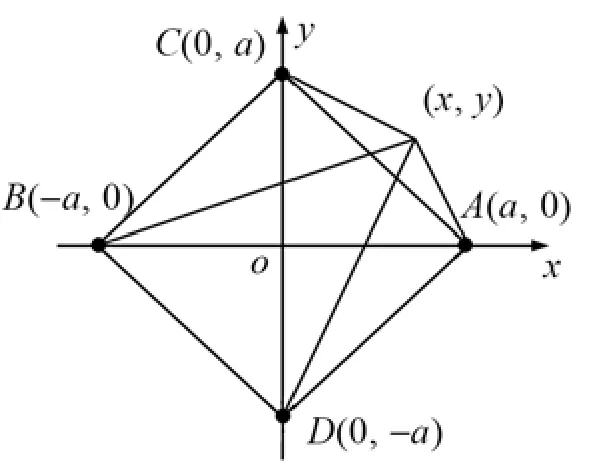
图1 平面四点阵示意图Fig.1 Planar four dot matrix diagram
设物体坐标为(x,y),坐标系原点为O,又设声传感器A、B间,C、D间距离为L。则有

声速在空气中传播速度为v,弹丸落地声到达A、B两传感器的时延差为t1,则

整理后可得双曲线方程:

对于y轴上的声传感器C、D,旋转/2−π就变成x轴上的A、B,根据坐标旋转变换关系:
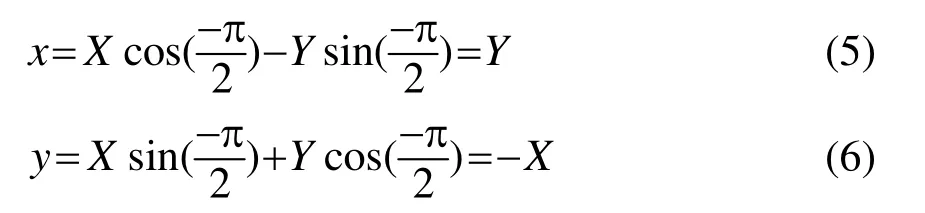
得到C、D的另一条双曲线方程如式(7)所示,式(7)中t2为声波到达C、D的时延差。

两条双曲线相交即为弹丸落地点坐标(x,y),解得x,y分别为
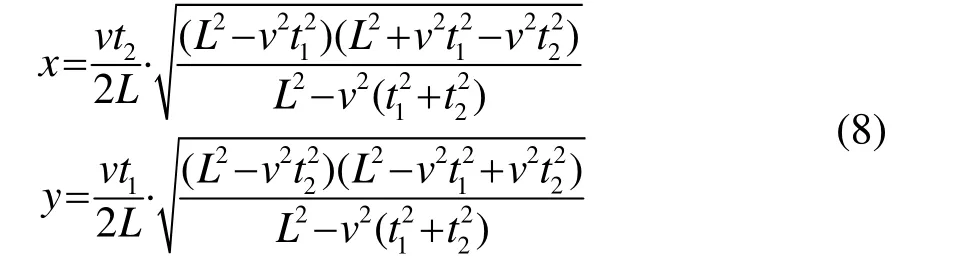
注意式(8)中t1和t2可能为负数,t1和t2正、负的不同组合,决定了落点坐标(x,y)在声传感器所布置的xoy坐标系中的象限。
2 广义互相关时延估计法
当采集到的声信号中物体所发声源级较强时,容易比较准确地求出声波极大点的位置,进而定位。然而在实际应用中,由于噪声及声传播损失的影响,有效声往往会被淹没在噪声之中,使时延估计法失去其作用,这时必须另辟他径,用其它方法得到两路信号时延差,而广义互相关时延估计法正好可用来计算同声源两路信号间时延差,从而解决这一问题。
大部分壳聚糖酶的分子量较低,目前发现分子量约在20~75 kDa之间。Wang 等从Aspergillus fumigatus KH-94中获得一个分子量大约为108 kDa的壳聚糖酶,具有很高的分子量。Zitouni等从Penicillium chrysogenum AS51D中获得的壳聚糖酶存在2种形式,分别为30,31 kDa。
四路阵元处于同一个噪声环境里,接收到的声音信号也来自同一个声源,因此,各路信号之间具有较强的相关性而与噪声无关。按照图2的算法,需要分别得到对角两路信号的时延差,而广义互相关方法恰好可得到对角两路信号的相关函数,从而可计算得出这两路信号之间的时延差。其基本思想是先对两路信号x1(t)和x2(t)进行预滤波,然后再求互相关函数,广义互相关时延估计法的原理框图如图2所示。

图2 广义互相关时延估计法原理框图Fig.2 Principle diagram of the generalized cross-correlation based time delay estimation

假设阵元1与阵元2接收到的声音信号x1(n)和x2(n)分别为:式中:s(n)为声源的原始信号;α1和α2分别为声音从声源传播到阵列的衰减;τ1和τ2分别为声音从声源传播到两个阵元的时间;n1(n) 和n2(n)分别为两路声音信号中的加性噪声。
由于声音信号与噪声互不相关,所以x1(n)和x2(n)互相关函数可表示为

为了简化计算,在噪声强度远小于声源强度的情况下,一般可以认为两路声音信号中的加性噪声n1(n) 和n2(n) 之间也互不相关,即Rn1n2(τ)=0,那么,式(11)可进一步简化为

当τ=τ1−τ2时,R12(τ)取最大值,因此通过搜索互相关函数的最大值,就能找到两路信号之间的时延差τ。
当互相关函数的主极大峰很尖锐时,容易比较准确地求出极大点的位置。然而在实际应用中,由于噪声的影响,相关函数的峰值被扩展,主极大峰常常比较平坦,这样就很难判断出极大点的准确位置,从而使时延估计产生较大的误差。为了获得更好的时延估计精度,在信号模型允许的条件下,观测时间应尽量取较大值。但此方法只适用于空阔的平原地带。其他因反射物会带来严重的干扰而导致互相关函数凸峰不明显,使方法失效。
3 数值计算和仿真
要进行计算机仿真,就首先要搞清楚仿真实验针对的背景噪声和目标噪声特性,这样才能尽可能地使仿真实验贴近实际。
3.1 环境噪声分析
对于声信号分析,首要问题就是对环境噪声进行分析。
3.2 目标物发声分析
军事目标中,大多数火炮的发射波和爆炸波的频谱主峰频率随距离变化不明显,发射波的主频为42~87 Hz,爆炸波的主频为6~32 Hz,TNT化学爆炸波的主频为8~18 Hz。而直升机、战斗机和坦克的辐射噪声是一个宽频信号,其中又有较明显的线谱成分,其能量主要集中在500 Hz以下的频段[7]。因此设计声定位系统时,应关心500 Hz以下的低频段噪声。
民用地面目标中,桥梁监控、仓库监视、人员及车辆的运动产生振动,能量较强,其主要频率成分集中在0~150 Hz范围内。因此在进行声定位仿真时,主要考虑对150 Hz以内的信号进行处理[8]。
3.3 计算机仿真
可将此方法模拟应用于炮弹靶场测试中,因为靶场相对开阔,几乎不存在反射物干扰,且采集数据长度可达数分钟左右,一定程度上避免了多路信号间噪声相关干扰的情况,因此正好可以应用广义互相关法进行仿真测试,取四点阵对角两阵元距离L=1200 m,四个点阵坐标分别为(0, 600),(−600, 0),(0, −600)和(600, 0),声速c=340 m/s,fs=40 kHz ,仿真给出一个中心频率为100 Hz、宽度为2 ms的脉冲信号作为炮弹落地声信号,加入高斯白噪声来模拟环境噪声后选取一路回波信号如图3所示。
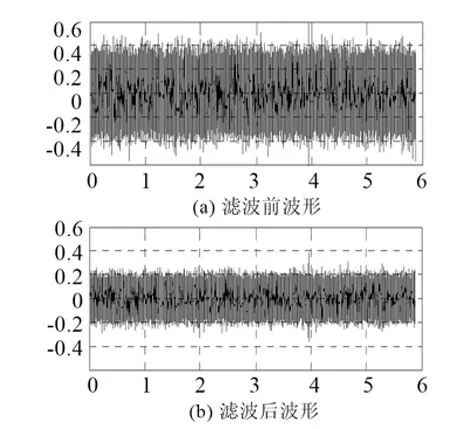
图3 滤波前后声目标波形图Fig.3 Acoustic target waveforms before and after filtering
图3中3(a)为滤波前波形,3(b)为滤波后波形,可见滤波后噪声明显削弱了不少,但是由于噪声为宽频信号,削弱噪声的同时亦把脉冲信号也削弱了,这样并不能达到精确时延差的目的。
但是广义互相关法是通过两路信号间最大互相关函数来求时延差的,如图4所示,在信噪比低于 10的情况下,两路时延差可清晰显示为图中最大互相关函数的横坐标所示时间。
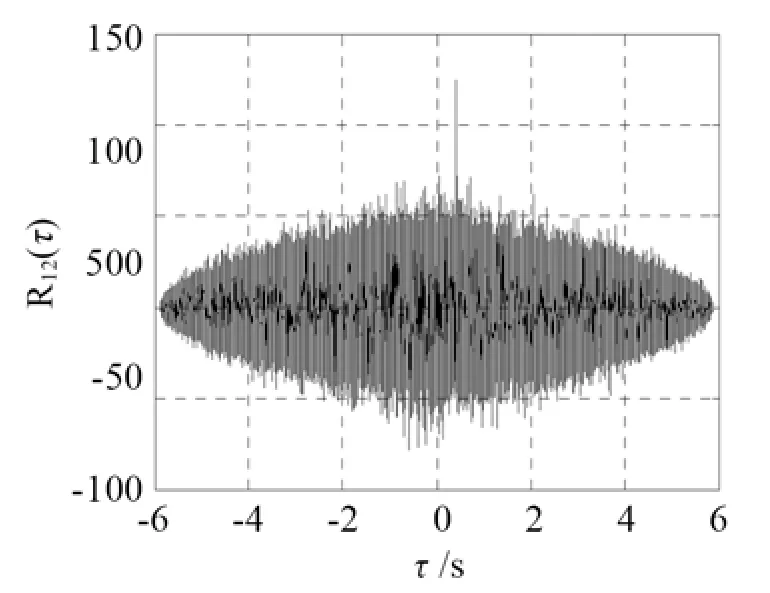
图4 广义互相关函数图Fig.4 Generalized cross-correlation function diagram
经过多次仿真实验,得到不同信噪比对两种算法的影响及误差如表1所示。

表1 不同信噪比对两种算法的误差及影响Table 1 The effects of signal to noise ratio on the estimate errors of the two algorithms
结果表明,用互相关算法得到的目标坐标在信噪比低于6 dB时才会失准,而降噪处理得到的坐标在信噪比等于10 dB时就会出现误差较大的情况,且低于8 dB后就会使算法失效。
信噪比等于10 dB的情况下,利用广义互相关法得出的两路信号间时延差比降噪滤波后直接判断最大值得到时延差这种方法精度提高很多。图5是根据两种方法重复仿真运算 20次求出的目标坐标值显示图,由图5可见,加窗滤波法计算得到的坐标值明显发散,不收敛,仿真精度也不高,而且有三次由于时延差判断错误而导致结果无效,因此达不到实验要求;而广义互相关法得到的目标坐标值收敛、稳定,基本可满足仿真需求。
4 实际应用
因为声定位方法大多是在前方收集数据,而后将数据发回后方进行分析处理。因此,在传播过程中难免会出现失真、不同步等情况,这会严重影响计算精度。例如在靶场测试、火炮阵地定位中,测试人员不能靠近数据采集设备,只能利用无线发射、手机覆盖网或电缆进行远距离传输。

图5 两种不同方法得到的定位目标坐标比较图Fig.5 Comparison of the target coordinates obtained from two different poisoning methods
为了尽量减小这类不必要的误差,首先要根据实际定位的目标声特性选择不同的传输设备(例如炮弹爆炸声频率较低,便可用无线发射装置远距离传输声信号,而桥梁检测则需用电缆实时传输振动数据);然后通过信号调理器调整好信号强度;最后用同步数据采集卡采集多路信号,这样就可保证广义互相关定位法能发挥其最大功效。
5 结 论
针对传统滤波降噪的同时会降低目标信号的强度,造成时延估计的不收敛问题,提出了采用广义互相关方法计算两路时延差,因利用两路信号间互相关函数来取得时延差,提高了时延估计的精度。此方法在地面、低空目标声定位应用上有广泛的开发前景,具有一定的现实意义。通过改进广义互相关法,还有望进一步提升其估计精度。
参考文献
[1] 李大林. 空中中低速目标被动声探测系统试验研究[D]. 北京: 北京理工大学, 2006: 1-2.LI Dalin. Passive Acoustic Detection System Experimentation Investigation of Aerial Medium and Low Speed Target[D]. Beijing:Beijing Institute of Technology, 2006: 1-2.
[2] 冯杰, 杨博, 李兆利, 空气声探测在军事中的应用[J]. 电声技术,2012, 36(6): 32-33.FENG Jie, YANG Bo, LI Zhaoli. Overview of Acoustic Detection and Its Application in Military[J]. Audio Engineering, 2012, 36(6):32-33.
[3] 庞学亮, 张效民, 杨向锋. 利用圆锥阵的低空声目标定向分析[J].武器装备自动化, 2005, 24(1): 1-2.PANG Xueliang, ZHANG Xiao-min, YANG Xiangfeng. Directional object analyzing of low altitude acoustic object with taper array[J]. Armament Automation, 2005, 24(1): 1-2.
[4] 雷鸣, 陈绍钦, 雷志勇. 近地炸点声定位算法研究[J]. 计算机测量与控制, 2012, 20(3): 734-735.LEI Ming, CHEN Shaoqin, LEI Zhiyong. Study on acoustic positioning algorithm about low-altitude bombing point of projectile[J]. Computer Measurement & Control, 2012, 20(3): 734-735.
[5] 王震. 基于互功率谱相位时延估计的声源定位系统研究[D]. 天津:天津大学, 2010: 11-12.WANG Zhen. Research on sound source localization system Based on time delay estimation cross-power spectrum phase[D]. Tianjin:Tianjin University, 2010: 11-12.
[6] 陈华伟. 低空目标声测无源定向理论与算法研究[D]. 西安: 西北工业大学, 2004: 33-35.CHEN Huawei. On passive acoustic direction finding for low altitude targets[D]. Xi’an: Northwestern Polytechnical University,2004: 33-35.
[7] 张冠武. 低空目标声定向方法研究[D]. 西安: 西北工业大学,2004: 33-35.ZHANG Guanwu. Study of low altitude target acoustic orientation method[D]. Xi’an: Northwestern Polytechnical University,2006: 3-10.
[8] 王斌. 地面运动目标振动信号的特性分析与目标识别[J]. 电子科技, 2012, 25(9): 105-106.WANG Bin. Characteristic analysis and object recognition for seismic signals of moving terrestrial targets[J]. Electronic Sci. &Tech., 2012, 25(9): 105-106.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
中国中医急症(2019年10期)2019-05-21
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
汉字汉语研究(2018年1期)2018-05-26
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年17期)2016-04-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27