
低慢小目标面阵推进式激光成像探测方法研究
2014-06-23 13:52李云霞韩晓飞
激光技术 2014年1期
李 达,李云霞,蒙 文,韩晓飞
低慢小目标面阵推进式激光成像探测方法研究
李 达,李云霞*,蒙 文,韩晓飞
(空军工程大学信息与导航学院,西安710077)
为了解决空中低慢小目标探测存在“发现难、识别难、跟踪难”的问题,提出了一种面阵推进式激光成像探测方法。采用面阵探测器对场景选通成像,通过车载成像系统的行进来实现多帧不同场景图像的获取,并运用一种特定的距离映射关系来实现对观测场景的3维重构。以低空小型飞行物为目标,设计了成像探测系统的基本参量,并从激光二极管阵列单元、脉冲宽度与重复频率、大气衰减、信噪比和脉冲峰值功率等方面分析了成像探测系统的基本性能。结果表明,在低空范围内,面阵推进式激光成像探测方法可有效对大面积空域进行快速3维成像,缩短图像生成时间,为下一步的系统工程实现提供了理论和技术指导。
成像系统;激光主动成像;距离选通;对空探测
引 言
近年来,随着各类航空突袭武器低空、超低空性能的不断增强,空中低慢小目标机动化、轻巧化设计能力的提高,经常有各类低慢小目标突破雷达和地面防空火力网,直逼一些重要地面目标,给反空袭预警带来严重的难题挑战。利用激光探测技术对空中低慢小目标进行成像,可有效地对目标进行识别与判定,提高对低慢小目标的预警监视能力,为构建新型侦查探测网络提供有力的支持[1-2]。
激光主动成像技术摆脱了以往探测成像技术的难题,具有体积小巧、适用范围广、抗干扰能力强、可在复杂背景条件下获取目标图像信息等的诸多优点[3]。与传统雷达探测技术相比,激光主动成像技术具有极高的角度和速度分辨率,在城市周边低空区域,可有效克服由于地物环境复杂而造成的接收系统易受地杂波和多径效应等的影响,为实时、准确、可靠地提供预警情报信息配备了有力的探测手段。在激光探测成像过程中,通过激光束对目标区域进行照射,反射的光信号经探测器接收处理后,便可得到探测区域的强度像和距离像,再经过一定的图像识别处理后,就可对目标进行特征判断[4]。
目前,国内外利用激光成像技术探测空中低慢小目标还处于探索阶段。对于传统的点扫描激光成像方式,由于引入了扫描机构,不仅造成了成像速率慢、成像分辨率低,而且系统的体积和价格也随之增加[5-6]。为此,在本文中,作者提出了一种面阵推进式激光成像探测模式,由面阵探测器实现对场景的选通成像,通过车载成像系统的行进实现多帧不同场景图像的获取,并运用一种特定的距离映射关系实现对观测场景图像的3维重构,快速、便捷地完成对空中低慢小目标的探测过程。
1 面阵推进式激光探测成像原理
面阵推进式激光成像探测模式是利用面阵探测器实现平面的2维成像,当车载成像探测系统移动搜索目标时,采用脉冲光源和距离选通的工作方式,由移动中的探测成像系统实现3维的推进扫描,图1为面阵推进式激光成像示意图。
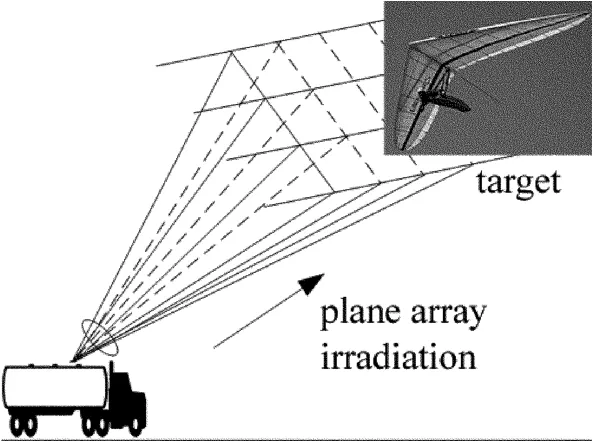
Fig.1 The schematic diagram of plane array propelled laser imaging detection
1.1光源照射模式选择
在成像探测过程中,对探测目标可采用二极管阵列面阵照射或应用单个激光器泛光照射。当采用激光二极管阵列作为照明光源时,发射光束通过整形照明系统后,可得到与探测器图样相匹配的并行光束,光电探测器各像元接收各自视场内的回波脉冲,回波经光学接收系统采集处理后,通过光功能器件将具有时间信息的脉冲调制为光强信号,经过特定的距离映射处理就可得到所需要的距离信息。
当采用单个激光器的输出光作为照明光源时,由于半导体激光器在快慢轴方向上的远场发散角不同,可采用准直透镜对光束在快慢轴方向上进行整形,以此来达到所要求的发散角和光束截面,反射的回波脉冲同样经光学系统接收后,经处理便可得到探测场景的强度和距离信息。
由于不同的发射模式会对成像效果产生不同的影响,当采用泛光模式照射时,探测器各像元之间存在间隙,其光能利用率不如面阵照射模式。研究表明,在相同的距离和峰值功率条件下,面阵照射模式可获得更高的信噪比;并且在相同测量精度的条件下,面阵照射模式比泛光照射模式需要更少的发射功率。因此,本文中选择激光二极管阵列作为照明光源,采用面阵照射模式,并在此基础上分析空中低慢小目标的探测过程。
1.2探测成像原理分析
当光学接收系统收到回波脉冲时,由于探测器接收到的回波信号包含光子飞行距离的时间信息,因此通过控制距离选通同步控制系统的延迟时间,计算激光脉冲Lp(t)和选通门G(t)的卷积就可得到探测器接收到的光强分布[7],其表达式为:
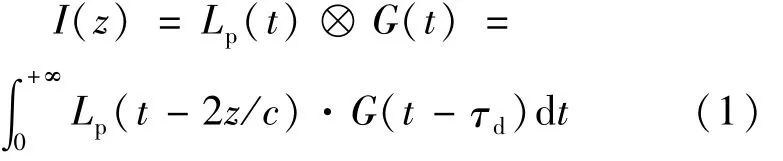
式中,接收端收到光子的强度-距离分布用I(z)表示,c为光速,z为探测距离,2z/c为光子往返传输所用时间,τd为选通门时延。由图2计算分析可知,经过对矩形的卷积运算,面阵探测器可获得线性良好的梯形光强-距离分布,梯形上下沿的斜坡展宽由发射激光脉冲宽度T决定,而顶部的平坦区宽度由发射激光脉冲宽度和选通门共同决定。当选通门宽度等于2倍的激光脉宽时,上下沿的斜坡展宽与顶边宽度相等,设宽度为T的激光脉冲其等效曝光范围为Δz,即Δz=cT,则探测器每接收到一个回波信号的有效梯形光强分布,其等效曝光范围上的宽度为3Δz,也即表示产生一个景深为3Δz的图像切片,其中光强分布的上下沿斜坡展宽与顶边宽度均为Δz。
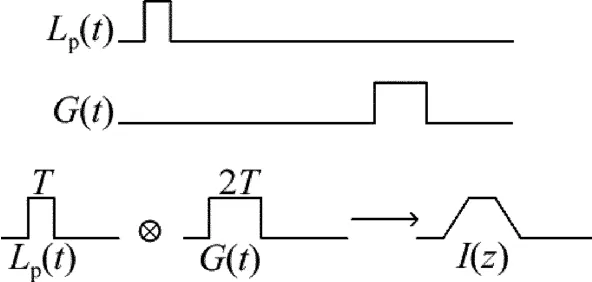
Fig.2 The signal profile of receiver obtained intensity vs.range
利用这一关系,通过控制车体的移动速度,使车载成像探测系统在前进的过程中,每次成像的位置距离上一次成像的位置相距为Δz,保持选通门延时τd不变,则探测器收到的相邻梯形光强分布会产生重叠,图3为3幅连续选通拍摄的相互重叠的强度-距离分布图,其中zi表示接收到第i个回波的顶边对应距离,即zi=τdc/2。利用重叠梯形斜坡边沿良好的线性关系,通过简单的分割就可以从顶边得到探测目标的反射率信息,从斜坡的光强增益经过计算就可以得到目标的距离信息,图3中,重叠区域[zi,zi+1]范围内z′处的成像距离计算表达式为:
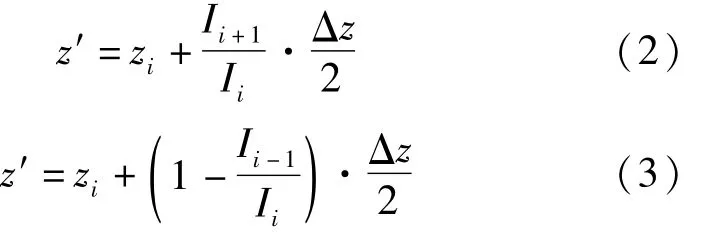
式中,Ii表示第i个图像切片的强度-距离分布I(z)在距离点z′处的光强值,应用(2)式或(3)式即可算出重叠区域中各点处的相应距离,通过两幅连续的图像切片光强比值,就可得出所成像区域中各点的距离信息。因而可以看出,这种方法最少只需两幅连续的图像切片就可对探测图像进行3维重构,同时获得探测目标的强度像与距离像,可以大大减少后续图像的处理量,改变以往需要通过上百张选通图像来计算目标距离图像的方法,缩短图像生成时间,为后续的识别处理系统提供便捷。
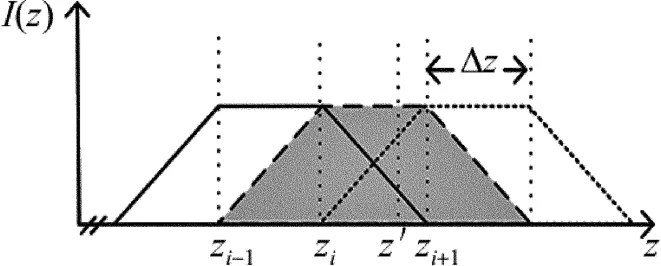
Fig.3 Overlapping intensity-range profile of successive range-gated images
2 面阵推进式激光成像系统分析
2.1系统成像工作过程
采用波长为808nm的半导体激光二极管阵列作为探测光源,激光束可包含多个独立的不相关的小光束,形成能量均匀分布的激光光斑,其触发电源可以与面阵探测器成像帧频同步,这样既可以在低功耗的情况下提高激光峰值功率,又能满足探测器接收曝光时间的要求,且808nm激光波长恰好处在近红外面阵探测器的响应峰值波长处,从而可以实现对低慢小目标探测的目的[8]。
以车载成像系统探测空中小型目标为例,为简化模型分析,假设激光束中每一个小光束照射到目标上形成的光斑为矩形[9],承载成像系统的车辆沿空中目标方向直线行驶,图4为照射光斑示意图,每一个二极管阵列单元的光束发散角为α×β,光束相对地平面仰角为θ,空中小目标高度为h,探测距离为z=h/sinθ,则形成照射光斑参量见下。

Fig.4 Diagram of laser cell array spot
光斑边长:

光斑面积:

由上式分析可知,光斑面积的大小与探测距离、发散角及仰角有关,随发散角和探测距离的增加而增加,但由于大气损耗及激光器自身功率等的影响,光束会随发散角和探测距离的增加而逐渐衰减,并且光斑过大导致的能量分散还不利于探测器对回波的接收,因而对这些因素需要折中考虑。当对面积为A×B的区域进行成像时,二极管阵列单元数假设为m×n,计算可得:
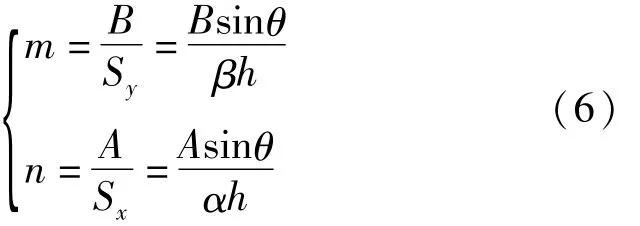
对空中目标进行探测时,结合实际条件对15m× 10m的区域覆盖成像,当光束发散角为2mrad× 0.6mrad,相对地平面仰角45°,目标高度600m,由(6)式计算可得m=9,n=20,即最小需要的激光二极管阵列数为9×20。通过车载系统的行驶前进,使每次成像的覆盖区域如图3部分重叠,在得到两幅以上的距离选通图像之后,就可通过前面所述的距离映射关系实现对探测场景图像的3维重构。
2.2激光二极管阵列脉冲宽度与重复频率
当车载成像系统移动探测目标时,空中低慢小目标相对于成像系统行进缓慢,因此可假设被探测目标处于静止当中,成像系统朝目标方向以速率v匀速行驶。由于系统每次成像的位置与前一次距离相差为Δz,利用这一关系,若要在空中广阔区域中发现并识别低慢小目标,需控制激光器阵列对大面积空域进行推进式照射。假设车载系统行驶速率为v,对前方宽度为L的空域进行推进式覆盖成像,则半导体激光器所需的脉冲重复频率f为:

可以看出,当激光器阵列单元数目确定之后,脉冲重复频率f随车载系统的移动速率增加而增加,随光源发散角的增加而减小。当车载系统以12m/s的速率、对宽度为500m范围内的空域进行推进式成像时,其它参量同第2.1节,可得脉冲最小重复频率为fmin=34Hz,取实际重复频率fre=50Hz,对比扫描式激光成像系统所需的重复频率(由kHz至MHz),可看出面阵推进式成像方法可以极大地降低对光源脉冲重复频率的要求。
激光脉冲的宽度直接影响了成像区域的探测范围,由第2.1节中的内容可知,系统单次脉冲成像时,需要对前方景深范围为15m的区域照射成像,依据第1.2节中脉冲等效曝光范围Δz=cT,可得脉冲宽度为T=50ns,成像景深范围随脉冲宽度的增加而增加。考虑脉冲实际宽度Tre与占空比Dre的要求(通常Tre·fre≤Dre,Dre<0.5%),可取Tre=200ns。
2.3探测距离仿真与分析
成像系统的探测、发现目标能力与多种因素有关,其性能分析主要针对系统的作用距离、信噪比和脉冲峰值功率等来进行。假定探测的物体表面具有朗伯反射率分布,且目标面积等于光束照射面积,由距离选通成像模型的激光雷达方程[10],面阵探测器接收到的激光功率为:

式中,Pt为激光器发射功率,ηt为发射系统光学效率,ηr为接收系统光学效率,ρ为反射率,φ为探测方向与朗伯表面法线夹角,Ar为探测器接收面积,z为探测距离,τatm为大气单程传输透射率,τatm=exp(-σz),σ为消光系数,根据经验公式可表示为:

式中,Vm是大气能见度,q为修正因子[11]。图5中给出了808nm的激光在不同大气能见度传输时总透射率与探测距离的关系,可以看出,当天气环境质量下降时,系统可探测距离急剧减少。由于低空区域易受扬尘、雾、霾等的干扰,要保证低空目标的有效成像,需着重考虑天气条件变差时激光在传输过程中的衰减因素。
信噪比是评判系统优劣的重要指标,可以直观地评价激光成像探测系统的性能,在设计系统时,以信噪比(signal-to-noise ratio,SNR)形式表示探测距离方程为:

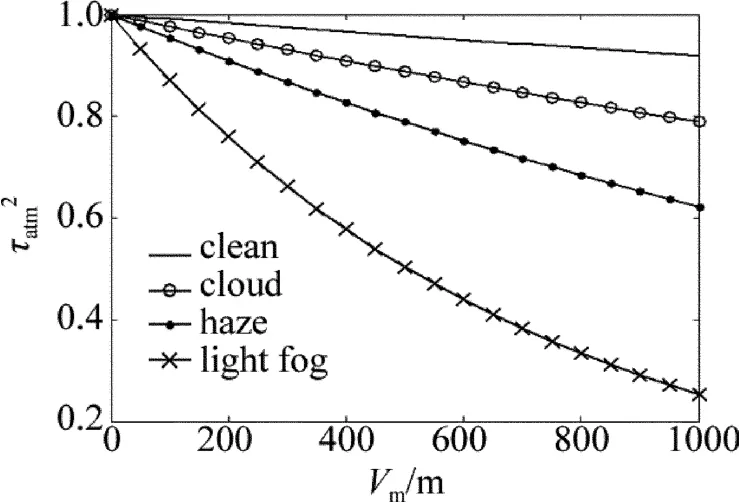
Fig.5 Two-way attenuation factor of808ns laser at different visibility
式中,PNEP为噪声等效功率,D为探测器接收孔径。假设系统的各项参量为:发射和接收系统光学效率ηt=ηr=0.8,接收孔径D=0.07m,噪声等效功率PNEP=10-8W,根据空中低慢小目标的探测特征,取反射率ρ=0.11,光束与目标表面法线夹角φ=45°。在能见度为5km的条件下,图6中给出了不同最小峰值功率条件下系统信噪比与探测距离的关系曲线,可以看出,随着探测距离的增大信噪比在迅速降低,当要求成像距离为1000m,SNR达到20dB时,二极管发射单元峰值功率最小为20W。
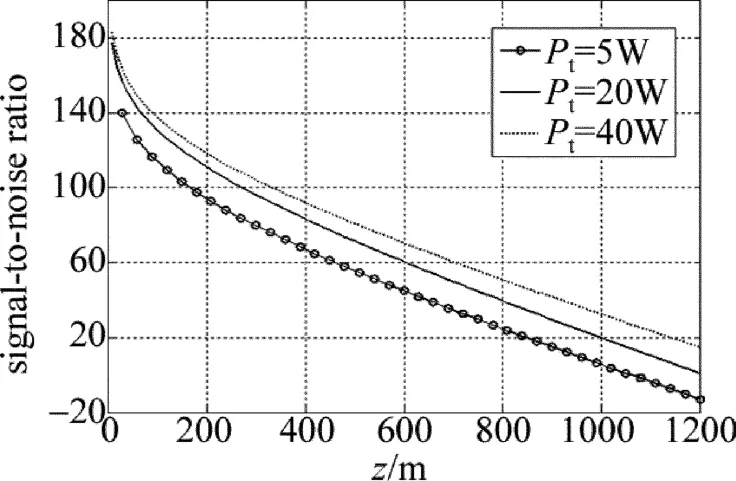
Fig.6 Relation between SNR and detection range
3 结 论
针对目前城市空防中低慢小目标的难点问题,作者提出了一种面阵推进式激光成像探测模式,基于激光距离选通成像技术的基本原理,分析了面阵推进式激光成像探测系统的工作过程,设计了系统的基本能参量并对其性能作了分析。与传统的扫描成像探测技术相比,该方法有效减少了图像处理运算过程,生成3维图像方式简单,具有实时快速成像的优点,为下一步的系统工程实现提供了理论和技术指导。
[1] CHEN YW,ZHANG L,HU Y H,et al.Array detection technology of echo on earth observation laser imager[J].Journal of Infrared and Millimeter Waves,2004,23(3):169-171.
[2] KUNZG J,BEKMAN H H P T,BENOIST KW,et al.Detection of small targets in a marine environment using laser radar[J].Proceedings of SPIE,2005,5885F:1-17.
[3] HAN HW,ZHANG X H,GEW L.A variable step scan method for underwater range-gated imaging[J].Laser Technology,2011,35(2):226-229(in Chinese).
[4] KAMEYAMA S,IMAKIM,TAMAGAWA Y,et al.3-D imaging LADAR with linear array devices:laser,detector and ROIC[J].Proceedings of SPIE,2009,738209:1-8.
[5] CAI X P,LIH M,LIU JB,et al.Overview of active optical three-dimensional imaging technology[J].Laser&Infrared,2006,37(1):22-25(in Chinese).
[6] ZHANG Y Y,LIU JS,LID Y.Design of laser imaging radar for air detection[J].Opto-Electronic Engineering,2008,35(1):36-39(in Chinese).
[7] PIERRE A.Long-range three dimensional imaging using range-gated laser radar images[J].Optical Engineering,2006,45(3):034301.
[8] FAN B H,ZHAOCh M,JIR Y.Research on technology of scannerless laser active imaging guidance[J].Semiconductor Optoelectronics,2008,29(3):426-429(in Chinese).
[9] BLANQUER E.Ladar proximity fuze-system study[D].Stockholm,Sweden:Royal Institute of Technology(KTH),2007:24-26.
[10] HU Ch Sh.Investigation into the high-speed pulsed laser diode 3D-imaging ladar[D].Changsha:National University of Defense Technology,2005:24-26(in Chinese).
[11] LIU X Ch,GAO T Ch,LIU Zh T.Effect of atmospheric aerosols on laser transmission attenuation[J].Journal of Atmospheric and Environmental Optics,2012,7(3):181-190(in Chinese).
Research of p lane array propelled laser imaging detection for small targets at low altitude and slow speed
LI Da,LI Yunxia,MENG Wen,HAN Xiaofei
(School of Information and Navigation,Air Force Engineering University,Xi’an 710077,China)
In order to solve the difficult problem of finding,identifying and tracking a low altitude,slow speed small target,a new technology of array propelled laser imaging method was proposed.With range-gated imaging model,different images of the scene were obtained by the moving forward vehicle system.According to the principle of plane array propelled imaging method,a 3-D reconstruction calculation about the successive range-gated images was introduced.Aiming at the characteristics of a low altitude,slow speed small target,the basic parameters of imaging detection system were designed.The performance of the system was studied including array elements,pulse repetition frequency,pulse duration,atmospheric attenuation and signal to noise.The results show that in low-flying area,this technology can be used to quickly imaging for 3-D observation scene,shortening the time required for images generation and could provide a guideline for the future system realization.
imaging system;laser active imaging;range-gated;air detection
TN247
A
10.7510/jgjs.issn.1001-3806.2014.01.010
1001-3806(2014)01-0044-05
李 达(1989-),男,硕士研究生,主要从事激光成像技术的研究。
*通讯联系人。E-mail:liyunxia_lyx@126.com
2013-03-16;
2013-05-16
猜你喜欢
奥秘(2021年3期)2021-04-12
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
电子测试(2018年15期)2018-09-26
科学与财富(2018年20期)2018-08-22
测绘科学与工程(2017年1期)2017-05-04
光学精密工程(2016年6期)2016-11-07
系统工程与电子技术(2016年2期)2016-04-16
红领巾·探索(2014年1期)2015-03-16
