
基于多级滤波的感兴趣边缘检测算法
2014-06-25 06:53王明静张学峰
激光与红外 2014年3期
王明静,张学峰
(中国空空导弹研究院,河南洛阳471009)
1 引言
如何从背景杂乱和噪声影响较大的图像重准确提取目标的感兴趣边缘,是视频监控、遥感影像中实现自动目标检测的关键技术之一。常用的边缘检测算法首先获取一幅特征图像(大多数情况是梯度幅值图像),然后对特征图像进行分割获取边缘,但因为常用的阈值分割方法的性能取决于特征图像的选择,而且特征图像的直方图常常是单峰的,因此分割阈值较难自适应确定[1]。文献[2]提出了迟滞阈值,使边缘检测的效果得到了一定的提升,但迟滞阈值的确定也不是一件容易的事情。文献[3]和[4]分别提出了一种迟滞阈值的确定方法,其基本思想是在阈值空间内搜索最优的迟滞阈值,存在计算量大、边缘图像评价准则难以确定等缺点,影响了算法的使用范围。阈值选择过高,则可能导致感兴趣目标的边缘不能被完整提取出来,而阈值选择过低,则可能导致提取出的边缘过多,增加后续处理的难度。以上基于阈值的边缘检测算法都只关注那些强度较强的边缘,而在实际中,可能会更关注具有某些结构特征的边缘,如线性边缘或具有特定形状的闭合边缘。另外,在前下视图像中,由于景深差距很大,近距离处的边缘和远距离的边缘强度可能有较大差别,所以边缘强度已不能作为一个有效的判据。
针对以上问题,研究人员提出了一些不需要确定阈值的新方法。如文献[5]把边缘检测看成统计推理过程,不同于基于模型的边缘检测算法,它是数据驱动的,但是使用之前需要先进行训练,限制了算法的应用范围,而且提取的边缘可能会缺失或者多像素宽。文献[6]介绍了一种基于线性预测的边缘检测方法,试验证明该算法对噪声不敏感。虽然这些方法展示了较好的应用前景,但这些方法都还处于理论研究中,在实际应用中的效果还有待进一步验证。
针对边缘检测算法阈值难确定和提出的干扰边缘较多的问题,本文提出了一种基于两级滤波的感兴趣边缘检测算法,并与Canny算法、Sobel算法进行了对比试验。
2 基于多级滤波的感兴趣边缘检测算法
基于知识的感兴趣边缘检测算法包含以下四个步骤:
1)对图像进行平滑滤波,滤除噪声;
2)用梯度算子分别提取水平方向和垂直方向的梯度,并获取梯度幅值图像和梯度方向图像;
3)根据梯度方向图像对梯度幅值图像进行滤波,滤除那些由噪声形成的边缘,同时对梯度幅值图像进行非最大值抑制;
“你看那边,是不是还是昨天那俩人?”虽然感冒了,精神不佳,但一点也不影响王施凯扫视四周,一眼就看到了路口徘徊的黑衣人。
4)对滤波后的梯度幅值图像进行分割,形成初始的边缘映射图,并进行边缘跟踪,获取所有的边缘段及其特征,从中滤除不满足特征约束的边缘,保留感兴趣的边缘。
2.1 图像平滑
图像平滑的主要作用是滤除图像噪声、平滑区域内部的弱小边缘和较复杂纹理内部的杂乱边缘。本文采用高斯模板对图像进行平滑滤波操作。高斯模板的方差根据图像噪声水平确定。
2.2 梯度特征图像计算
梯度特征图像包括梯度幅值图像和梯度方向图像。梯度特征图像的计算方法为:首先对二维高斯函数分别求X和Y方向的偏导数,得到X方向和Y方向的梯度算子;然后对图像进行卷积运算,得到X方向和Y方向的梯度图像,记为Grad X和Grad Y;最后按式(1)和式(2)计算梯度幅值图像Grad和梯度方向图像Dir:

将0°~360°的梯度方向均匀量化为32个方向,编号为0~31,其分布如图1所示,水平向右为方向0,按逆时针分别为0~31。

图1 梯度方向示意图
2.3 梯度幅值图像滤波
在视频图像中,感兴趣物体的边缘一般是连续的具有一定形状的较为平滑的边缘,而噪声的边缘一般没有固定形状,或者只是一个孤立的梯度幅值点,所以可以利用先验知识对梯度幅值图像进行滤波处理,删除不感兴趣的边缘点。感兴趣的边缘点具有如下特征:
1)在边缘的方向上至少有另外四个边缘方向相近的边缘点;
2)在边缘的法线方向上至少有另外两个边缘方向相近的边缘点;
条件1)是为了剔除那些由噪声点形成的边缘,它包含三种情况:
a)边缘点的两边各有两个边缘方向相近的边缘点;
b)边缘点的某一边有四个边缘方向相近的边缘点;
c)边缘点的一边有一个边缘方向相近的边缘点而另一边有三个边缘方向相近的边缘点。
条件2)是考虑到图像中真实的边缘一般会有一个过渡区,而那些干扰形成的边缘则更陡峭,它包含两种情况:
a)边缘点的法线方向两边各有一个边缘方向相近的边缘点;
b)边缘点的法线方向的某一边有两个边缘方向相近的边缘点。
边缘方向相近指边缘方向相差在45°以内,即梯度方向相差在4以内。
条件3)完成对边缘点的非最大值抑制,以便能提取单像素宽的边缘。
2.4 边缘跟踪与滤波
经过对梯度幅值图像滤波操作后,保留下来的边缘点大部分位于感兴趣的边缘处,因此可以采用一个动态范围很小的阈值对梯度幅值图像进行分割,获取初始边缘图像。此处根据图像的空域噪声确定分割阈值,即将那些由噪声引入的边缘排除,而保留其他边缘。
获取初始边缘图像后,对各边缘进行细化、平滑操作,然后进行跟踪边缘,获取所有的边缘段,最后统计各边缘段的特征。边缘跟踪时,如果遇到分叉边缘点,则根据已经获取的边缘段上的边缘点来预测边缘的方向,选择与预测边缘方向最接近的边缘点作为下一个跟踪边缘点。本文采用的边缘方向预测方法为:选择已经获取的边缘段上最近的8个点,按其边缘走向作为预测边缘方向,如果已获取的边缘段上边缘点的个数不足8个,则根据所有边缘点的边缘走向生成预测边缘方向。在边缘跟踪的同时,记录边缘段上每个点的坐标、边缘段上边缘点的最大梯度幅值和所有边缘点的平均梯度幅值等信息。
获取所有边缘段后,即可对边缘段进行滤波,从中删除不满足特征要求的边缘,保留感兴趣的边缘,边缘滤波的准则为:如果边缘段所有边缘点的平均梯度幅值小于阈值或者所有边缘点的最大梯度幅值小于阈值,则删除该边缘段。此处的阈值在梯度幅值图像中按分位数法选取,即阈值应该使梯度幅值图像中所有有效边缘点的梯度幅值小于阈值的点的个数占总的有效边缘点的个数的比例为P。通常,平均梯度幅值阈值的分位数设置为0.2,最大梯度幅值阈值的分位数设置为0.5,即可满足大部分需求。
3 实验结果与分析
本文主要从两个方面对算法的性能进行评估:一是算法参数的设置对边缘检测结果的影响,二是将本文算法与通用的对边缘检测效果较好的Canny算法、Sobel算法进行了比较,以验证本文算法的先进性。
3.1 算法参数设置对边缘检测结果的影响
本文算法共需设置三个阈值参数:
1)对滤波后的梯度幅值图像进行分割的参数;
2)对跟踪得到的边缘的平均梯度幅值进行限制的阈值;
3)对跟踪得到的边缘的最大梯度幅值进行限制的阈值。
这三个阈值均按分位数法选取。由于对梯度幅值图像进行滤波后,需尽可能保留感兴趣的边缘,因此算法中第一个阈值分位数的设置值不能太大,本文中选择为0.05,即保留滤波后95%的边缘点作为候选边缘点。对另两个阈值的分位数分别取为{0.2,0.5}、{0.1,0.25}、{0.05,0.15},得到的边缘图像分别如图2(d)~图2(f)所示。
图2(a)为原始图像,图2(b)为提取的梯度幅值图像,图2(c)为滤波后梯度幅值图像的分割结果。可以看出,随着阈值的降低,检测出的边缘数量逐渐增多,在高阈值下不能检测出的弱小边缘逐渐显现出来,但图像中比较显著的能量较强的边缘几乎没有变化,而这些边缘正是进行目标识别所感兴趣的边缘,所以本文算法对参数设置具有较好的适应性。
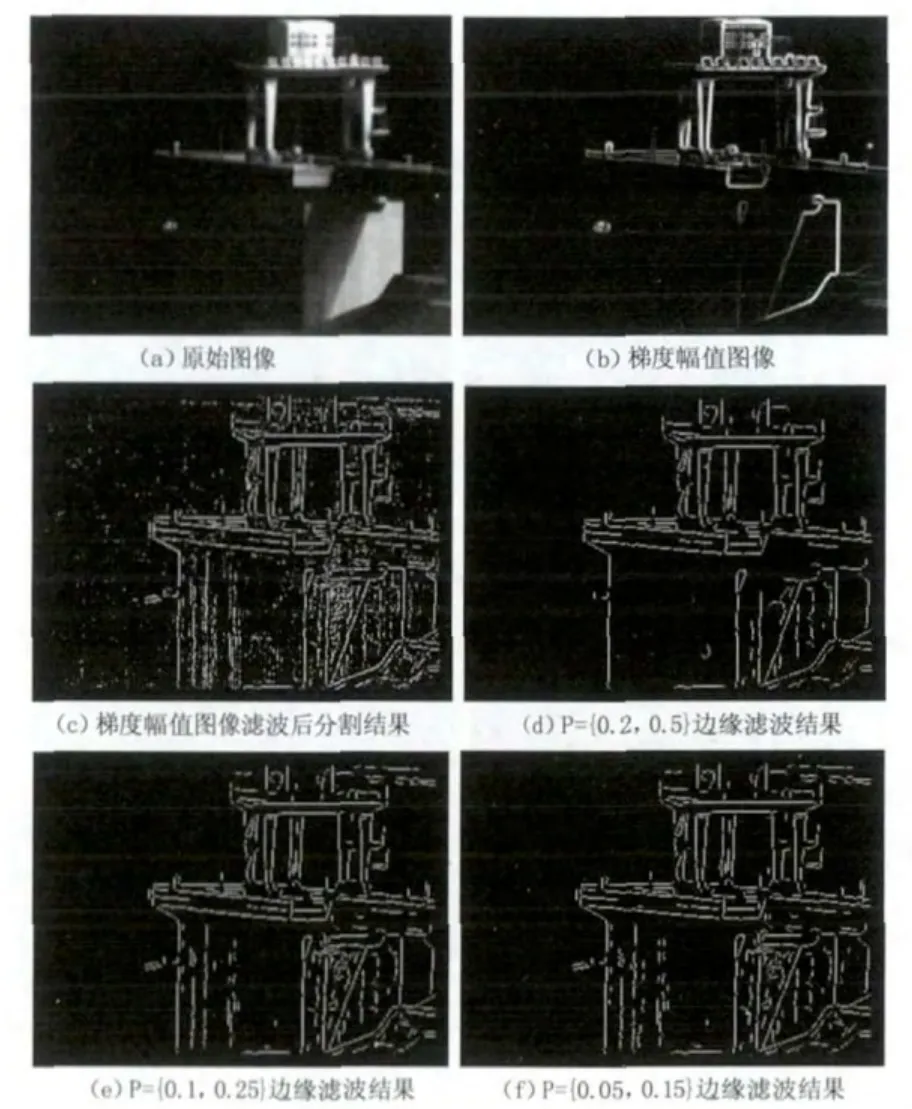
图2 不同参数的边缘检测结果
3.2 边缘检测算法对比试验
采用道路图像和建筑图像对Canny算法、Sobel算法、本文算法进行了对比试验,试验结果如图3和图4所示。图3为道路图像的边缘检测结果,图3(a)为原始图像,图3(b)为Canny算法结果,图3(c)为Sobel算法结果,图3(d)为本文算法结果,可以看出,Canny算法虽然检测出了道路边缘,但保留了太多道路内部和草地的细节边缘,增加了后续处理的难度,Sobel算法效果不错,但依然保留了图像下方的许多草地边缘,本文算法较好的提取了道路边缘,且保留的干扰边缘最少。

图3 道路边缘检测结果
图4 为建筑图像的边缘检测结果,图4(a)为原始图像,图4(b)为Canny算法结果,图4(c)为Sobel算法结果,图4(d)为本文算法结果,可以看出,Canny算法较好的检测出了建筑边缘,但同样检测出了太多的干扰边缘,增加了后续处理的难度,Sobel算法检测出的建筑边缘不完整,且保留了图像下方很多干扰边缘,本文算法较完整的提取了建筑边缘,且很好的抑制了图像下方的干扰边缘。
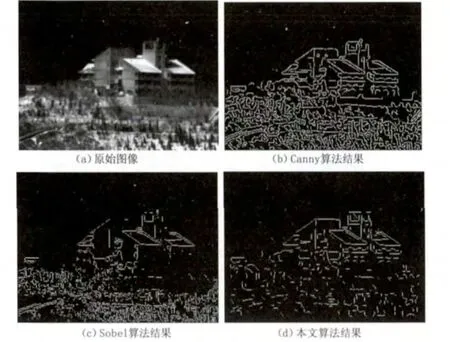
图4 建筑边缘检测结果
4 结论
本文提出了一种基于多级滤波的感兴趣边缘检测算法,该算法基于感兴趣的边缘一般都表现为直线或曲率较干扰边缘小的事实,首先根据梯度方向对梯度幅值图像进行滤波和非最大值抑制操作,保留所有可能的感兴趣边缘;然后进行边缘跟踪,提取边缘的特征,进一步滤除干扰边缘。这种做法融合了梯度幅值大小和梯度方向信息,使边缘提取与边缘段识别同步进行。能更有效的提取图像中感兴趣的边缘,同时排除干扰边缘,减少后续处理的难度。同时算法中需要设置的参数数量少,而且算法性能对参数设置不敏感,所以算法的适应能力更强,使用范围更广。通过用大量视频监控图像和遥感图像对算法进行测试,并与经典的边缘检测算法进行对比,证明本文算法适应范围广,能有效滤除较复杂纹理产生的杂乱边缘,提取图像中形状规则的感兴趣边缘,降低后续目标识别过程的复杂性,提高目标识别概率。
但本文算法也存在一些不足,比如没有考虑多尺度边缘的提取,对算法参数的优化选择考虑不够。在进一步的研究中,将在边缘检测算法中引入多尺度思想,在不同尺度下检测出更多感兴趣的边缘,综合各尺度下的边缘以更好的滤除干扰边缘,同时对算法参数的选择和设置对算法性能的影响进行定量分析,给出参数选择的理论依据。
[1] Y J Zhang.A survey on evaluation methods for image segmentation[J].Pattern Recognition,1996,29:1335 -1346.
[2] M D Heath,S Sarkar,T Sanocki,et al.A robust visual method for assessing the relative performance of edgedetection algorithms[J].IEEE Transactions on Pattern A-nalysis and Machine Intelligence,1997,19:1338 -1359.
[3] R Medina-Carnicer,A Carmona-Poyato,R Munoz-Salinas.Determining hysteresis thresholds for edge detection by combining the advantages and disadvantages of thresholding methods[J].IEEE Transactions on Image Processing,2010,19(1):165 -173.
[4] Yitzhak Yitzhaky,Eli Peli.A method for objective edge detection evaluation and detector parameter selection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(8):1027 -1033.
[5] Scott Konishi,Alan L Yuille,James M Coughlan.Statistical edge detection:learning and evaluating edge cues[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(1):57 -74.
[6] James Z Zhang,Peter C Tay,Robert D Adams.A novel image edge detection method using linear prediction[J].IEEE,2010,:620 -623.
猜你喜欢
数学物理学报(2021年6期)2021-12-21
含能材料(2021年1期)2021-01-10
应用数学(2020年2期)2020-06-24
数学年刊A辑(中文版)(2018年2期)2019-01-08
电子制作(2017年7期)2017-06-05
工业设计(2016年8期)2016-04-16
电测与仪表(2016年15期)2016-04-12
电源技术(2015年5期)2015-08-22
电测与仪表(2015年7期)2015-04-09
河南科技(2014年3期)2014-02-27
