
利用三维激光扫描技术进行建筑物室内外一体建模方法研究
2014-06-27 05:47盛业华
测绘通报 2014年7期
杨 林,盛业华,王 波
(南京师范大学虚拟地理环境教育部重点实验室,江苏南京 210023)
利用三维激光扫描技术进行建筑物室内外一体建模方法研究
杨 林,盛业华,王 波
(南京师范大学虚拟地理环境教育部重点实验室,江苏南京 210023)
面向建筑物室内外一体精细建模,探讨基于三维激光扫描技术实现过程中三维激光点云数据采集、拼接、配准、特征提取及三维模型构建等关键技术,重点针对室内外一体建模目标下点云外业和内业的具体处理方法,并结合具体实例,验证了技术方案的可行性和有效性。
三维激光扫描;建筑物;室内外;建模
一、引 言
数字城市是近年来的研究热点。精确重建的建筑三维模型在建筑方法研究、安全监控、建筑物修复、城市规划设计等方面具有极其重要的意义。随着地面三维激光扫描系统软硬件的不断完善,将地面三维激光扫描系统应用于建筑物三维重建方面受到极大关注,特别是在激光点云数据去噪、激光点云与数字影像的配准、离散激光点云的构网、三维模型的纹理映射等方面。目前已有研究多是对建筑物外表面进行建模[1-2],而缺少对建筑完整信息的表达。本文以南京师范大学地理科学学院行远楼的室内外一体建模为例,探讨三维激光扫描技术在复杂建筑物三维重建中的关键技术和难点,实现对建筑结构的三维建模、空间量测和分析等功能。
二、三维激光扫描技术
三维激光扫描系统是一套由扫描仪硬件、CCD影像采集系统(可选项,用于获取地物纹理影像数据)和软件部分等组成的系统,其中最主要的组成部分是三维激光扫描仪,软件部分包括系统控制软件和数据后处理软件等。除此之外,三维激光扫描系统还可配备GPS定位系统、全站仪等常规测绘仪器,为后续进行地理空间数据获取及数据拼接提供支持。根据扫描的空间位置或系统运行平台不同[3],可分为机载激光扫描系统、地面激光扫描系统和便携式激光扫描系统。面向建筑物三维重建主要是采用地面激光扫描系统。
三维激光扫描仪是三维点云数据采集设备,主要包括激光发射器、激光反射镜、激光自适应聚焦控制单元、光机点自动传感转置等[4]。三维激光扫描仪内部主要通过两个同步反射镜快速有序地旋转,一个水平360°旋转,另一个垂直180°旋转,两者相互配合将激光脉冲发射器发出的激光脉冲依次扫过被测物体表面,并测量每个激光脉冲从发出到接收的时间差(或相位差)来计算距离,扫描控制系统控制和测量每个激光脉冲的水平角度与垂直角度,根据空间三角函数原理计算出激光点在被测场景中的三维坐标信息。
以地面三维激光扫描系统为例,其工作原理是:三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面反射后,几乎沿相同的路径反向传回到接收器,系统根据往返时间差或相位差计算目标点与扫描仪扫描中心的距离S,控制器同时测量出每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β,如图1所示。

图1 三维激光扫描仪数据采集几何示意图
根据式(1)可获得反射点P的坐标
三、室内外一体建模方法
1.数据采集与预处理
数据采集包括根据扫描对象和周围环境进行设站,站间标靶的安置,采集参数的设置,如扫描区间(角度范围)、分辨率,以及外业数据的扫描等。
对于室内外一体建模的数据采集,特别要注意3个问题:①由于室内环境下扫描距离较近,室内部分扫描参数需要重新配置,相对室外扫描分辨率可设置低一些;②由于室内视线近,很容易产生死角和盲区,因此要多设测站;③站间距离较近,因此对用于配准的标靶点的放置提出了更高的要求,因为标靶到测站的距离及标靶间的空间分布都有一定的限制条件,此时可选用脚架作为标靶的载体,灵活选点。
(2)数据滤波
上述过程采集得到的往往是包含地形、建筑物和其他地物数据的原始数据,这时需要进行预处理,得到比较纯粹的建筑物数据。此过程主要是进行去噪滤波,即针对扫描现场的复杂性,去除遮挡和非建模对象扫描点等噪声点,如地面部分、树木、行人等。处理的方法有两种:①对于明显的大量噪声点(如地形点),可通过已有的点云处理软件交互完成;②对于原始点云数据中的错误点和含有粗差的点,可通过编程实现剔除,包括根据激光扫描回波信号强度辨别,利用中值滤波、曲面拟合等方法处理,同时可提高数据处理的自动化程度。
(3)点云与影像匹配
众所周知,影像具有特征连续、光谱纹理信息丰富等特性,基于影像进行特征提取有极大的优势,但是影像精度相比三维点云较差。因此,进行点云与影像的匹配,实现三维点云与二维影像的空间映射,为后续利用影像特征辅助点云数据进行特征提取和精细建模提供基础数据。
度量可以是因人而异的,度量单位就是把不同个体的度量方法标准化,是为了对度量的结果进行传播和交流的需要.因此,度量单位的制定必须能够表达度量的本质,方法科学、表达准确、相对稳定,能够得到人们的广泛共识.
要实现点云与影像的空间映射,首先需要确定影像上像素坐标与三维点云的对应关系,即需要对点云数据和影像数据进行配准。在影像数据中,每个像素点空间位置的对应关系由相机成像几何模型参数决定。以最简单的针孔模型为例,需要对相机成像过程中涉及的坐标系统进行转换,包括世界坐标系到相机坐标系、相机坐标系到图像坐标系、图像坐标系到像素坐标系之间的转换。经过这3次坐标转换,才能将地理空间中的三维数据投影到二维平面中[5]。此类研究较多,本文此处不再赘述。
2.数据配准
扫描仪通过获取表征目标实体表面特征的密集点云的空间三维坐标,为地面对象尤其是建筑物的高精度表面测绘和建模创造了条件。复杂地面对象表面易于产生扫描线遮挡,导致无法通过一次设站获取完整覆盖扫描对象表面的点云数据,因此必须在环绕扫描对象一周的不同位置设站,采用多测站、多视角扫描方式,对扫描对象不同部位分别扫描,获得该对象各个部位的分块点云数据,再通过分块数据配准才能获得完整的扫描对象。
地面三维激光数据配准是地面三维激光技术的重点和难点,配准的精度直接影响到后期成果的精度。数据配准就是把不同视点的数据统一到一个坐标系下,使之成为一个整体。每一个视点的数据都有一个独立的测站坐标系,通过一个旋转矩阵和原点的三维平移可找出两个测站坐标系的关系,继而实现测站间的数据配准。现有的地面三维点云数据配准方法大致分为基于特征的数据配准和迭代数据配准[6],前者通常是通过设置多对控制点标靶作为特征,或在两视点数据之间选取明显的共同特征作为配准特征,如同名可视平面或同名直线进行配准;后者是通过计算两相邻测站初始点集的最近距离点对(至少3对初始同名点)实现测站间坐标系的转换,经过迭代计算得到两视点配准的最佳矩阵。目前利用特征配准的方法,特别是利用控制点配准的方法,其数据配准精度较好、方便可靠,但需要前期外业布控。由于特征不足、特征不够清晰也会造成配准失败,因此,需要多种配准方法配合使用,甚至要对现有的配准方法加以改进才能使配准效果达到最好,如基于测量平差理论的自动拼接方法[7-8]。
3.室内外一体建模
模型是对实体对象的抽象表示,对建筑物进行三维建模,才能对其进行三维真实表达,进而才可能在计算机中对建筑物进行仿真、模拟和分析。
(1)模型的选择与表达
根据三维模型表示的方式不同,对点云数据进行三维模型重建有两种方法:一种是三维表面模型重建,主要是构造网格(三角形网格等)逼近物体表面;另一种是几何模型重建,常见于CAD中的轮廓模型。前者构网方法简单,适用于地形数据建模,但对于点云这样的大数据量不适用;后者先把点云转化为实体模型,然后提取实体模型的轮廓线或特征线,生成CAD等模型,适用于建筑物等较规则实体对象的建模。面向图形表示的几何模型又分为点模型、线模型、面模型和体模型4类[9]。
(2)特征提取
基于三维激光扫描数据的建筑物建模的特征提取可基于点云和影像的融合来进行。图2是对应的技术路线图。基于点云的特征提取方法有基于激光回波信号强度、曲率、梯度、距离等[10]。基于影像特征提取的方法研究较多,目前常用的特征提取算法如离散余弦变换、小波变换、Gabor滤波器组、共生矩阵、灰度直方图等[11],本文不再赘述。
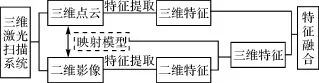
图2 基于点云与影像融合的特征提取技术路线图
在分别获取点云和影像特征的基础上,利用点云和影像间的空间映射模型,将二维影像特征投影到三维空间,并作为初始特征,辅助点云进行更精细的特征优化。
实际特征提取的过程中,由于点云分辨率的空间分异性、材质的反射差异、影像拍摄角度、光照阴影、建筑物表面非几何特征(如装饰线条)的干扰,非地物目标的遮挡等原因,导致初步特征提取的结果往往不能满足建模的要求,需要进行特征处理,如细节修补、错误特征的删除等。最后,确定特征单元的邻接关系,以确定建筑物表面总的拓扑结构,为后续的物理建模提供基础。
(3)室内外一体建模
在不同的几何模型表达方法中,线框模型方法原理简单,应用比较广泛。线框是相邻表面或物体外形的交线,通过找出点云中共面的点,然后把这些点拟合成面,最后利用相邻的面拓展相交,即可求出面与面的交线,构造出物体的三维线框模型;或提取点云中位于轮廓线上的扫描点,然后把这些点拟合成轮廓线,构造出物体的轮廓线框模型。这种方法适合用于建筑物中平面较多的情况,能快速地拟合出恰当的平面。
值得注意的是,室内建模部分由于近距离扫描,楼内拐角较多,很容易出现部件扫描不全或完全漏扫的情况。解决方法一种是加密扫描站,另外一种是利用建筑部件空间结构特征与空间关系进行拟合,如可以通过两相交平面空间延伸交会拟合漏扫的拐角,通过墙面夹角拟合被遮挡的其他墙面等。这种处理方法在一些通用的点云处理软件中都有。
四、应用实例
本研究中采用FARO Focus3D 120三维激光扫描仪进行数据获取,其三维激光扫描仪精度较高,最高分辨率在10 m处点间距0.9 mm,25 m处达到2 mm,测速快、稳定性好,扫描速度可达到近100万点/s,完成全景(水平360°)的最高精度扫描只需要10 min左右,而且外形轻巧,操作方便。外接相机经过高精度标定,能够满足应用要求。
本文以南京师范大学行远楼为例(如图3所示),进行室内外一体化建模试验。利用FARO三维扫描仪对该楼外立面、内部结构及420会议室、421实验室等进行三维点云数据采集、建模试验。共采集实验数据18站(包括外围9站,天井与室内部分共9站),测站空间分布如图4所示,数据配准后点云数据量接近3亿。

图3 原始影像

图4 点云数据采集测站分布图
配准采用标靶球为连接特征点,辅助以同名面特征进行坐标转换。整个建筑配准后的点云如图5所示,其中从天井俯视的室内细节如图6所示。
本文采用面向对象技术进行三维建模。首先实现点云和影像特征的提取与融合,对海量点云数据进行抽稀,然后选择线框模型进行模型表达。利用PointCloud软件和AutoCAD软件平台对模型进行三维模型构建和可视化的后处理工作。试验对行远楼每个楼层、窗户等进行精细建模,建模结果如图7所示。
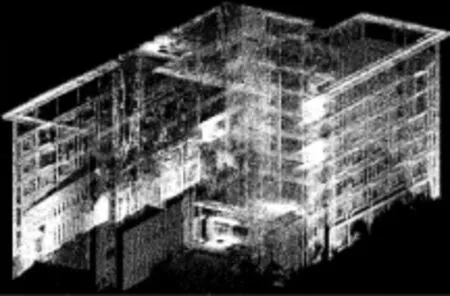
图5 点云配准图

图6 室内(天井)点云俯视图

图7 地科院建模结果(无纹理)
五、结束语
基于三维激光扫描技术的建筑物室内外一体精细建模方法适合于大多数的城市建筑,简单高效,可大量节省数据处理时间,为城市三维建模等提供基础数据。但是也存在两个问题:①线框模型方法只适合于拟合平面,对于复杂不规则建筑曲面难以拟合,从而无法得到理想的效果,需要单独处理;②点云数据量太大,普通PC机无法对点云数据进行处理,如点云查看、删减、拼接等,这些操作需在图形工作站上完成,而且速度较慢,因此如何对点云建立索引结构,以实现在非工作站完成大量点云的操作建模,也是需要研究的问题。
[1] 白成军,吴葱.文物建筑测绘中三维激光扫描技术的核心问题研究[J].测绘通报,2012(1):36-38.
[2] 张爱武,孙卫东,李风亭.基于激光扫描数据的室外场景表面重建方法[J].系统仿真学报,2005,17(2):384-387,391.
[3] 马立广.地面三维激光扫描仪的分类与应用[J].地理空间信息,2005,3(3):60-62.
[4] 毛方儒,王磊.三维激光扫描测量技术[J].宇航计测技术,2005,25(2):1-6.
[5] 仇兵.面向三维激光扫描的真实感纹理映射技术研究[D].南京:南京理工大学,2009.
[6] 丁延辉.地面三维激光数据配准研究[J].测绘通报,2009(2):57-59.
[7] 盛业华,张卡,张凯,等.地面三维激光扫描点云的多站数据无缝拼接[J].中国矿业大学学报,2010,39 (2):233-237.
[8] 张剑清,翟瑞芳,郑顺义.激光扫描多三维视图的全自动无缝镶嵌[J].武汉大学学报:信息科学版,2007,32 (2):100-103.
[9] 路兴昌,宫辉力,赵文吉,等.基于激光扫描数据的三维可视化建模[J].系统仿真学报,2007,19(7):1624-1629.
[10] 刘春,陈华云,吴杭彬.激光三维遥感的数据处理与特征提取[M].北京:科学出版社,2010:128-177.
[11] 赵一凡,夏良正,潘泓.基于轮廓波的纹理图像特征提取方法[J].信号处理,2010,2(2):161-165.
[12] 龚俊,朱庆,章汉武,等.基于R树索引的三维场景细节层次自适应控制方法[J].测绘学报,2011,40(4):531-534.
[13] 卢秀山,郑作亚,王冬,等.3Dsurs系统激光扫描点的理论精度评定[J].测绘学报,2010,39(2):202-206.
3D Reconstruction for Indoor-outdoor Architecture Based on 3D Laser Scanning
YANG Lin,SHENG Yehua,WANG Bo
P237
B
0494-0911(2014)07-0027-04
2013-03-22
国家自然科学基金(41101377);江苏省测绘科研项目(JSCHKY201111)
杨 林(1976—),女,湖北武汉人,博士,副教授,从事数字摄影测量和GIS方面的研究。
杨林,盛业华,王波.利用三维激光扫描技术进行建筑物室内外一体建模方法研究[J].测绘通报,2014(7):27-30.
10.13474/j. cnki.11-2246.2014.0218
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
小学生学习指导(低年级)(2019年9期)2019-09-25
电子制作(2019年15期)2019-08-27
模具制造(2019年3期)2019-06-06
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
小天使·二年级语数英综合(2015年12期)2015-12-04
现代营销·经营版(2015年3期)2015-04-20
