
基于CORS的潮位观测系统设计及短期验潮站深度基准面的确定方法
2014-06-27 05:47汤均博
测绘通报 2014年7期
汤均博,周 立
(淮海工学院测绘工程学院,江苏连云港 222005)
基于CORS的潮位观测系统设计及短期验潮站深度基准面的确定方法
汤均博,周 立
(淮海工学院测绘工程学院,江苏连云港 222005)
将CORS技术应用于潮位观测,设计出基于CORS的潮位观测系统,实现长、短期验潮站验潮的同步化和自动化,并在此基础上推演出短期验潮站深度基准面的确定方法。
潮汐观测;连续运行参考站(CORS);深度基准;短期验潮站
一、引 言
潮位观测是海洋测量中一项重要的工作。传统的验潮方法是水尺验潮或验潮仪自动验潮。这两种方法除需要投入人力物力外,最主要的缺陷是不能实现长、短期验潮站之间的潮位同步联测,短期验潮站多年平均海面及深度基准面的位置也不能实时确定。
为了保证航行安全和航道的利用率,我国采用理论最低潮面作为深度基准面。受潮汐和风浪的影响,深度基准面存在明显的动态效应。即使在相同的海域,不同短期验潮站深度基准面相对多年平均海面的位置也有所不同[1]。本文提出应用GNSSCORS进行潮位观测,并在此基础上阐述短期验潮站深度基准面的确定方法。
二、基于CORS的潮位观测方法
1.基本原理
GNSS连续运行参考站系统(CORS)是利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户自动地提供经过检验的不同类型的GNSS观测值(载波相位,伪距)、各种改正数、状态信息及其他有关GNSS服务项目的系统。与传统的GNSS作业相比,连续运行参考站具有作用范围广、精度高、野外单机作业等众多优点。目前沿海近海海域大多被CORS系统覆盖[2]。将CORS应用于潮位观测,相对于传统潮位观测具有方便、快速、实时连续等优点。
短期验潮站深度基准面的确定方法主要有独立求定法和传递推估法。独立求定法利用标准的计算公式,计算理论最低潮面距离多年平均海面的距离;传递推估法利用测区内已有长期验潮站的理论最低潮面估算得到临时验潮站的理论最低潮面[3]。
常用的传递推估方法有同步改正法和潮差比传递法。根据文献[3],当长、短期验潮站距离不远,深度基准面变化微小,可假定长、短期验潮站所在位置的长、短期平均海面的差距相等。设C、D分别为长期验潮站和短期验潮站,可采用下式推算深度基准面

式中,MC、MD分别为同步潮位观测期间验潮站C、D从多年长期平均海面起算的短期平均海面的高度;LC、LD分别为验潮站C、D从多年长期平均海面起算的深度基准面的高度。
潮差比传递法的公式为

式中,RC、RD分别为多年长期验潮站C和短期验潮站D的潮差。
该方法的依据是:潮差越大,理论最低潮面越低,其假设比较接近事实,潮差比传递法的使用范围较广。潮差比法仅需要3~6 d的同步水位观测资料,通过比较高低潮位来确定潮差比。
深度基准面和平均海面具有较强的时间历元特性,式(2)中,RC和RD是3~6 d的同步观测期间的高低潮位差的平均。
附加时间一致性要求,对应的平均海面应是同步潮位观测期间的短期平均海面,故潮差比可表示为
2.潮位观测方法设计
分别在长期多年验潮站C和短期验潮站D设置GNSS-CORS接收机,实时观测海水面WGS-84椭球大地高。CORS接收机安置方法如图1所示。
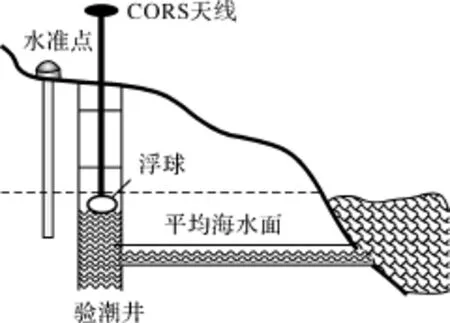
图1 验潮站GNSS CORS接收机安置示意图
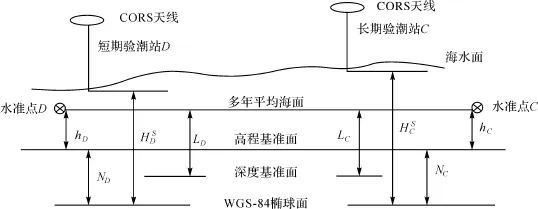
图2 长短期验潮站潮位观测关系示意图
三、短期验潮站深度基准面的确定
由于在实际工作中,长期验潮站多年平均海水面的位置大多是参照高程基准面确定的,因此确定短期验潮站深度基准面的位置包括两方面的内容:一是确定短期验潮站深度基准面的位置hD;二是求定短期验潮站相对多年平均海水面的高度LD。
当长、短期验潮站有陆路相通时,通常采用水准联测法确定hD;当长、短期验潮站没有陆路相通时,可通过同步改正法测定hD[4]。 由图2可知,长、短期验潮站瞬时海水面相对于多年平均海水面的高度分别为


由式(5),长、短期验潮站短期平均海面相对于多年长期平均海面的高度为

式中,N为观测期数。代入式(1),得

代入式(4),得

四、结束语
海洋验潮及深度基准面的确定是海洋测量中极其重要且经常性的工作。通过引入GNSS CORS实时验潮,实现长、短期验潮站潮位观测同步化和自动化,可节省大量的人力物力。若在实际工作中,开发出基于CORS的深度基准面计算系统,则更能简化确定深度基准面的烦琐工作,这在实际工作中是切实可行的,值得推广。
[1] 许家琨,申家双,缪世伟,等.海洋测绘垂直基准的建立与转换[J].海洋测绘,2011,31(1):4-7.
[2] 史照良,沈飞.江苏省现代大地测量基准的建立方案探讨[J].测绘通报,2007(9):26-28.
[3] 郑行昭,付兴武,刘雷.临时验潮站深度基准面确定技术的改进[J].海洋测绘,2009,29(11):58-60.
[4] 周立.海洋测绘[M].北京:科学出版社,2013:115-116.
[5] 欧阳永忠,陆秀平,孙纪章,等.GPS测高技术在无验潮水深测量中的应用[J].海洋测绘,2005,25(1):6-9.
[6] 吴俊彦,韩范畴,成俊,等.我国深度基准面不统一所带来的问题与对策[J].海洋测绘,2008,28(7):54-56.
[7] 孙新轩,刘雁春,暴景阳,等.海图深度基准面传递算法的精度分析[J].测绘科学技术学报,2009,26(3):229-231.
[8] 陈艳华,周兴华,孙翠羽,等.我国海域无缝垂直基准面的选择[J].海岸工程,2010,29(2):43-47.
[9] 周旭华,吴斌,李军.高精度大地测量中的海潮位移改正[J].测绘学报,2001,30(4):327-330.
The Design of Tide Observation System and Determination of Sea Level Datum for the Short Term Tidal Gauges Based on the CORS
TANG Junbo,ZHOU Li
P229
B
0494-0911(2014)07-0053-02
2013-04-23
汤均博(1968—),男,湖北英山人,副教授,研究方向为卫星定位技术在海洋测绘中的应用。
汤均博,周立.基于CORS的潮位观测系统设计及短期验潮站深度基准面的确定方法[J].测绘通报,2014(7):53-54.
10.13474/ j.cnki.11-2246.2014.0224
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
港工技术(2022年2期)2022-05-12
河北地质(2021年1期)2021-07-21
红蜻蜓·低年级(2021年2期)2021-07-20
小学科学(2020年6期)2020-06-22
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
水利水电快报(2019年2期)2019-03-08
中国公共安全(2017年7期)2017-10-13
小学生导刊(2017年18期)2017-05-17
