
旋翼无人机林火点定位技术研究
2014-07-02 00:21张思玉姚树人
测绘通报 2014年12期
何 诚,张思玉,姚树人
(1.南京森林警察学院林火研究中心,江苏 南京 210023;2.国家林业局森林防火工程技术研究中心,江苏 南京 210023;3.中国林业科学研究院森林生态环境与保护研究所,北京 100091)
旋翼无人机林火点定位技术研究
何 诚1,2,3,张思玉1,2,姚树人1
(1.南京森林警察学院林火研究中心,江苏 南京 210023;2.国家林业局森林防火工程技术研究中心,江苏 南京 210023;3.中国林业科学研究院森林生态环境与保护研究所,北京 100091)
无人机携带摄像系统在森林防火中应用广泛,林火点的精准定位是该项技术推广应用的关键。本文提出一种基于GPS和微波测距的森林着火点定位方法,通过在南京森林警察学院院内两块试验场地(林地、无林土丘)进行火烧除工作点火试验,以无人机和飞控系统为主要手段获取旋翼无人机现实飞行参数、无人机航空摄影林火数据,以地面精准监测林火实证数据为基础,结合三维地形数据信息,对基于GPS和微波测距的森林着火点定位方法精度进行检验。数据表明,该方法是一项有效的无人机林火点定位技术,且林火定位技术的真误差在10 m以内,完全满足林火监测精度要求。该技术能够迅速、准确判断森林着火点位置,为森林防火提供决策性数据支持。
无人机;林火位置;定位技术;旋翼
一、引 言
目前采用的林火监测手段主要有卫星遥感、塔台瞭望、地面巡视和飞机巡护等。利用卫星监测林火的优势是覆盖面积大,1~2 h就可以获取一次覆盖全国的资料,但受自身轨道周期和天气影响,资料的实时性和分辨率欠佳。防火塔瞭望的实时性最好,但单塔的覆盖范围有限,需要组网配置,这大大增加了人员和设备成本,且近地面瞭望受地形影响大,存在视觉盲点。人工地面巡视工作量巨大,人员处于森林底层,视线遮挡严重,观察范围有限,效率低下。相对而言,飞机空中巡护监测林火的实时性和适应性俱佳,优点突出,但其保有和使用成本高,难以大规模、常态化运行,目前,多数林区只在重点防火时期租用飞机开展相关护林作业[1-2]。无人机是一种新型的航空平台,近年来随着其技术的成熟已在气象探空、灾情监测、环境遥感等众多领域中得到应用[3-6]。特别是质量轻、体积小的微型无人机具有购置成本低、运行费用少、操作简便、机动灵活等特点,能够根据现场情况实时调整作业方案及载荷设备,非常适合用于森林火灾的监测作业。
但目前针对无人机林火点定位技术的研究却很少,无人机上携带摄像系统在森林防火中巡护时,如发现火灾却不能及时准确定位出火点位置,将会大大减少无人机在森林防火中的作用[7]。通过文献发现[8],很多无人机运用到测绘方面,通过对获取的影像进行拼接处理,从而获取了地物坐标。该方法如应用到森林防火上,将失去时效性,从而耽误林火扑救指挥。本文提出一种能够迅速、准确判断森林着火点位置的基于GPS和微波测距的森林着火点定位方法,为林火管理提供科学依据,从而可以降低由于林火监测的盲目性造成的损失。
二、无人机系统组成
试验无人机为无人驾驶电动六旋翼直升机,飞机自身重10 kg,最大载荷5 kg,6个旋翼组成了六边形,长宽高为1110 mm×1060 mm×650 mm,飞行速度为0~20 m/s,飞行时间为20~30 min。该无人机上装有GPS接收器和云台,在云台上设置有摄像机和微波测距仪;与地面控制中心进行无线通信的控制器,分别与驱动云台动作的驱动器、控制无人机动作的驾驶中心、摄像机、微波测距仪、GPS接收器电连接,如图1所示。该旋翼无人机操控系统使用的是Futaba 2.4 GHz10通道遥控器,配备 R6014HS接收机。
试验中的无人机使用的定位系统是双频Trimble 5700型RTK GPS接收机,该接收机水平定位精度为2 cm+1 um,垂直定位精度3 cm+2 um。在受地面遥控的无人机上设置控制器和云台,该云台既能绕大地坐标系中的纵轴左右旋转,又能在平面内上下旋转;在云台上固定有摄像机、微波测距仪;GPS接收器与摄像机相连,并位于摄像机的光轴上。控制器用于与地面的控制中心进行无线通信,控制器分别与驱动云台动作的驱动器、控制无人机动作的驾驶中心、摄像机、微波测距仪、GPS接收器电连接[9-10],配置结构图如图2所示。

图1 搭载GPS的六旋翼无人电动直升机

图2 无人机配置示意图
三、材料与方法
1.试验场地概况
试验场地共分为两部分,一部分选择杨树林面积为126.9 m2的区域,该杨树林为人工林,林分平均高为10 m,郁闭度0.7,在该区域上均匀铺设厚度为5 cm左右的枯枝落叶等可燃物,周边清理出2 m左右的隔离带,防止跑火,为了增加燃烧效果,在可燃物上撒上适量汽油。为了清晰了解林火行为,在点烧区域的杨树进行标注,使用红漆标注出每棵树的序号,并在每棵树的1 m、2 m、3 m方位使用红漆标出,方便判别林火高度,试验场地如图3所示。另一块试验场地为高差7 m的土丘,面积在350.5 m2,在陡急及平缓区域都铺上枯枝落叶,进行点烧,为了对林火点进行定量分析,在样地上均匀布设花杆,并对花杆进行依次编号,如图4所示。

图3 试验场地1(杨树林)

图4 试验场地2(空旷土丘)
2.无人机火点定位原理
无人机在森林上方飞行时,摄像机自动对森林摄像,并通过控制器把拍摄的影像实时由无线装置传输到控制中心。当控制中心看到森林着火的图像,控制中心向控制器发送指令,云台停止动作,同时通过驾驶中心让无人机悬停。此时,着火点位于摄像机的光轴上(如图5所示),通过GPS接收器接收到设定坐标系中的坐标S(XS,YS,ZS)。
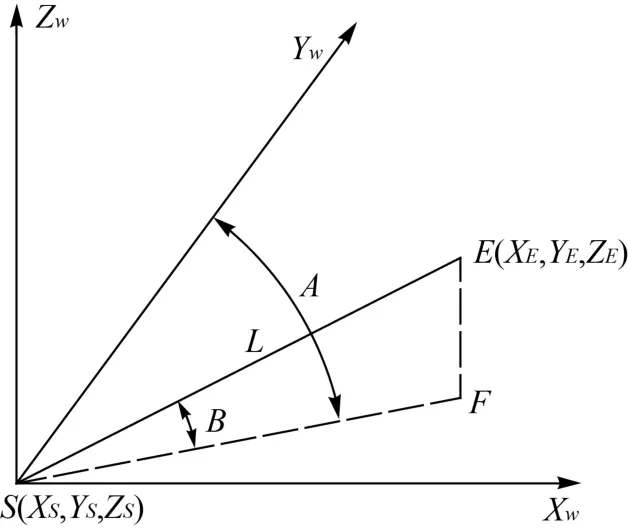
图5 无人机林火点定位原理图
由于GPS接收器、摄像机、微波测距仪之间距离很小,可以认为GPS接收器、摄像机、微波测距仪均位于S点。通过微波测距仪测量出微波测距仪至着火点的距离L,其中微波测距原理为

式中,v为无线电传播速度;t为传播时间。
通过控制器得到摄像机光轴SE与SXWYWZW坐标系中的XWYW水平面的夹角B,以及摄像机光轴在水平方向上的投影SF与YW轴的夹角A。把距离L、夹角B、夹角A、XS值、YS值、ZS值通过控制器发送至控制中心,在控制中心计算出着火点的坐标E(XE,YE,ZE)并显示
四、结果与分析
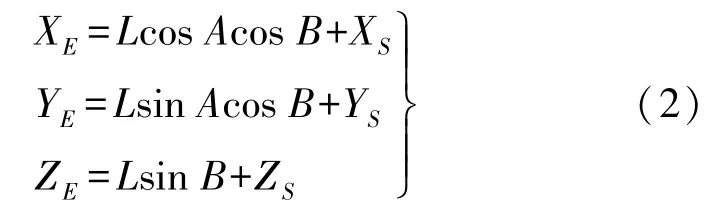
将无人机定位系统坐标系与地面量测系统坐标系统一,对两块试验场地的特征树木及花杆三维坐标进行量测,通过地面测量系统整理出无人机获取的地物坐标(树木、特征点、林火点)的三维坐标,通过人为分析比对,归纳出地面精准获取地物点配套的无人机获取的与其相近特征点三维坐标,具体见表1和表2。
地面测量系统使用的南方NTS-3401型免棱镜全站仪进行样地测量,仪器的精度为3 mm+2×10-6D[11]。试验中,选取地面测量系统获取的数据作为真值,用来检验无人机测量数据精度,无人机两个试验场地获取特征点三维坐标的真误差分别如图6和图7所示。
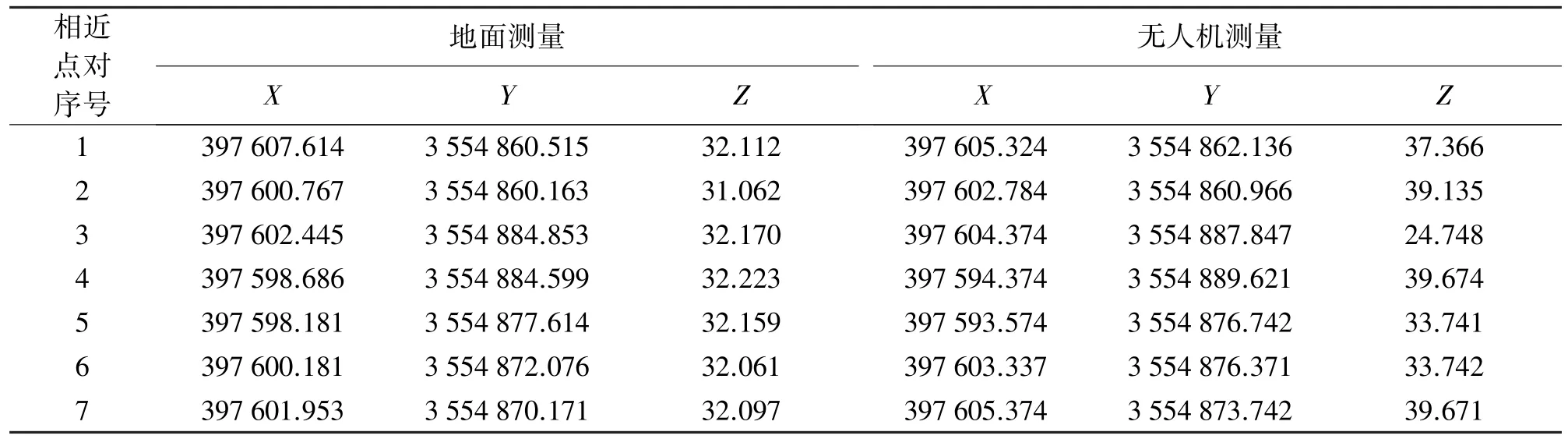
表1 试验场地1(杨树林)针对无人机测量坐标的检验结果
表2 试验场地2(土丘)针对无人机测量坐标的检验结果

图6 试验场地1(杨树林)无人机测量的三维坐标真误差图
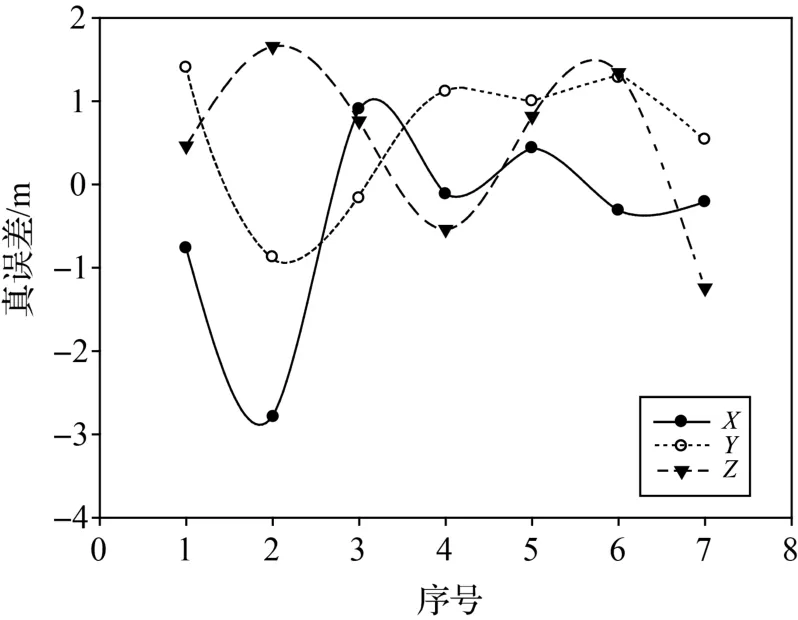
图7 试验场地2(土丘)无人机测量的三维坐标真误差图
通过图6可以得出,六旋翼无人机针对树冠下的火点三维坐标定位的真误差区间为(-8,10),其中高程坐标的离散区间大于平面坐标离散区间,平面坐标的精度3 m左右,而高程坐标的精度为5 m左右;通过图7可以发现,六旋翼无人机针对无树冠遮挡的火点坐标测量的精度要高于树冠遮挡的林火坐标精度,无人机获取火点坐标的真误差区间为(-3,2),平面坐标的精度在1 m左右,高程坐标的精度在1.5 m左右。分析无人机光秃土丘获取特征点坐标的精度高于树林样地内获取特征点坐标的原因,是因为无人机使用的测距为微波测距,由于树冠的遮挡对无人机与特征点之间距离的量取产生了影响,从而导致特征点的三维坐标的精度降低。
五、结论与讨论
本文提出了一种基于旋翼无人机定位林火点坐标的方法,该方法解决了旋翼无人机飞行过程中实时精准定位林火点坐标的难题,为森林火灾预防及火灾扑救指挥提供了决策性技术支持。
1)本文研究的基于GPS和微波测距的森林着火点定位方法,总体定位精度在10 m以内,无树冠遮挡的林火点探测精度要高于树冠遮挡下的火点坐标探测精度,平面坐标精度高于高程坐标精度。整体相对精准测量的精度来说是低精度,但完全满足林火监测的精度要求,森林防火中的火点定位精度属于林业测量粗放型的测量要求,50 m左右的偏差就足以提供林火监测信息。
2)飞行员驾驶的飞机在森林防火巡航时,对森林火点定位时,依靠飞行人员目测判别后根据地形图定位出火点方位,因部分大片森林,人员无法准确寻找出参照物,导致人员目估林火点定位精度稳定性低,从而导致耽误森林扑救指挥的决策和时机。基于GPS和微波测距的森林着火点定位方法是一种能够迅速、准确、自动判断森林着火点位置,有效解决了上述有人机林火监测中的难题。
[1] 张思玉,张慧莲.森林火灾预防[M].北京:中国林业出版社,2006:83-106.
[2] 何诚,冯仲科,张思玉,等.基于MODIS数据的森林火险时空分异规律研究[J].光谱学与光谱分析,2013,32(9):2472-2477.
[3] ZHANG Chunhua,KOVACS J M.The Application of Small Unmanned Aerial Systems for Precision Agriculture:a Review[J].Precision Agriculture,2012,13(6):693-712.
[4] 李冰,刘镕源,刘素红,等.基于低空无人机遥感的冬小麦覆盖度变化监测[J].农业工程学报,2012,28 (13):160-165.
[5] 李继宇,张铁民,彭孝东,等.四旋翼飞行器农田位置信息采集平台设计与实验[J].农业机械学报,2013,44(5):202-206.
[6] AMBROSIA V,WEGENER S,SULLIVAN D,et al.Demonstrating UAV-aquired Real-time Thermal Data Overfires[J].Photogramm.Eng.Remote Sensing,2003,69 (4):391-402.
[7] MERINO L,CABALLERO F,MARTÍNEZ D D,et al.A Cooperative Perception System for Multiple UAVs:Application to Automatic Detection of Forest Fires[J].J. Field Robot,2006,23(3-4):165-184.
[8] 史华林.无人机航测系统在公路带状地形测量中的应用[J].测绘通报,2014(6):60-62.
[9] 张思玉,何诚.基于GPS和微波测距的森林着火点定位方法:中国,CN201410316018.2[P].2014-07-07.
[10] 何诚,张思玉.基于GPS接收器和双摄像机的森林着火点定位方法:中国,CN201410316018.2[P].2014-07-07.
[11] 何诚,巩垠熙,冯仲科,等.超站仪极坐标法的运用及其探讨[J].测绘通报,2011(2):26-28.
Forest Fires Locating Technology Based on Rotor UAV
HE Cheng,ZHANG Siyu,YAO Shuren
P237
B
0494-0911(2014)12-0024-04
何诚,张思玉,姚树人.旋翼无人机林火点定位技术研究[J].测绘通报,2014(12):24-27.
10.13474/j.cnki.11-2246.2014.0389
2014-07-31
国家林业局948项目(2013-4-65);中央高校基本科研业务费专项资金(LGZD201401);中国博士后科学基金(2014M561092)
何 诚(1985—),男,安徽马鞍山人,博士后,讲师,主要从事测绘与3S技术、森林防火研究工作。
张思玉
猜你喜欢
石油沥青(2022年3期)2022-08-26
红外技术(2021年1期)2021-01-29
初中生学习指导·中考版(2020年12期)2020-09-10
家庭科学·新健康(2019年10期)2019-11-18
测控技术(2018年10期)2018-11-25
无人机(2018年12期)2018-09-10
鹿鸣(2018年1期)2018-01-30
中国科技财富(2017年4期)2017-06-05
中国环境监察(2016年7期)2016-10-23
核安全(2016年1期)2016-06-29
