手持式桉树幼苗种植器动杆疲劳分析
2014-07-12 12:25温晓霞陈少雄
桉树科技 2014年2期
温晓霞,薛 忠,陈少雄,李 慧*
(1.广东海洋大学寸金学院信息系,广东 湛江524094; 2.中国热带农业科学院农业机械研究所,广东 湛江524091;
3.国家林业局桉树研究开发中心,广东 湛江 524022)
手持式桉树幼苗种植器动杆疲劳分析
温晓霞1,薛 忠2,陈少雄3,李 慧3*
(1.广东海洋大学寸金学院信息系,广东 湛江524094; 2.中国热带农业科学院农业机械研究所,广东 湛江524091;
3.国家林业局桉树研究开发中心,广东 湛江 524022)
手持式桉树幼苗种植器是一种简易的苗木种植辅助工具,在林地面积较小、林地为山地时,由于常常不适宜使用大型机械化作业,此时有广泛实用价值。本研究针对自行设计的手持式桉树幼苗种植器动杆部分使用SolidWorks软件进行三维实体建模并导入Ansys-Workbench软件开展有限元静力学分析,在此基础上进行疲劳分析,找出其薄弱区域和寿命曲线,通过分析得出最大破坏应力为3.677 2×108Pa, 最小安全因子仅为0.260 47, 100%载荷条件下循环寿命约为5 000次,各指标的限制因素均出现在焊接部位。
苗木移栽器;疲劳;Workbench
桉树(Eucalyptus)具有生长快、轮伐期短、适应性广、需肥量大等特点,其种植面积在世界范围较大,截止目前,桉树人工林面积已达2 100万hm2,大部分集中在巴西、印度及中国[1]。在我国,目前种植区域多集中在广西、广东、福建等华南地区,该地区拥有充足的雨水和阳光,为林木速生丰产提供了良好的自然条件,但该地区的林业土壤多为农业弃地,一般较为贫瘠[2],在桉树幼苗种植时常常会遇到种植区面积较小、山地较多的情况,不适合于大型机械化作业,存在施工较难、效率较低、有安全隐患等问题,同时机械作业对土壤往往有一定的破坏作用:一方面通过车胎辗压,使大部分土壤塌实、降低土壤通透性、改变土壤容重;另一方面,由于机械作业挖穴较大,往往对挖穴处的土壤产生了机械扰动,容易造成土壤过分松动、降低土壤抗侵蚀和保水、蓄水的能力[3],严重影响苗木成活率。而传统的人工开穴、手工种植的方式则导致工作效率低下、劳动强度大[4],同时使种植成本大大提高,对桉树的营林极为不利。手持式桉树幼苗种植器是一种简易的苗木移栽辅助工具,它能在不改变土壤物理参数的前提下提高苗木种植效率,减少劳动强度,因此具有一定的推广应用价值。
1 手持式桉树幼苗种植器工作原理及组成
手持式桉树幼苗种植器规格为9 cm(管径) × 40 cm(宽) × 100 cm(高)示意图如图1(b)所示,由入土部件鸭嘴AB、导苗管1、动杆2、脚踏板6、手柄7等部件组成。
进行苗木种植时将鸭嘴紧闭的手持式桉树幼苗种植器垂直插于松软苗穴上,双手扶持确保导苗管垂直,脚踩踏板使鸭嘴深入苗穴,然后将幼苗顺着放入导苗管,双手拉紧手柄使入土的鸭嘴张开,幼苗顺着导苗管落入苗穴的同时提起移苗器完成植苗作业。
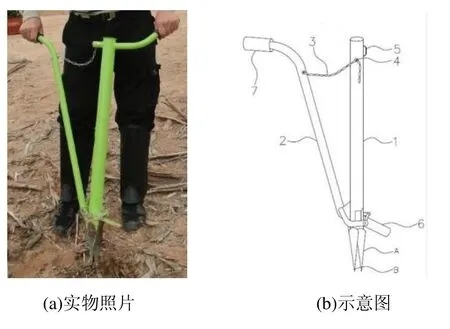
图1 手持式桉树幼苗种植器
2 动杆的受力分析与有限元模型
2.1 入土阻力
本文所研究的种植器动杆以入土鸭嘴为主要工作部件,其三维实体模型如图2示。完成切土动作时与土壤的接触面为鸭嘴的外表面。
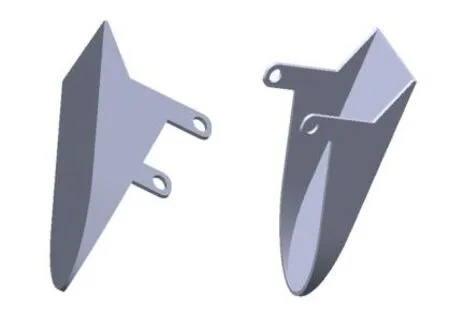
图2 入土鸭嘴的三维实体模型
在20世纪80年代,张彦英等[5]人提出中型直铲式树木移栽机下铲阻力经验公式:

桉树幼苗种植器工作时的入土角度为 30°~ 45°,深度 150 mm,对于类似受力情况,工作阻力取1 430 N进行分析[6-8]。
2.2 动杆的有限元模型
在Solidworks中先建立起三维实体模型如图3所示,然后导入Ansys-Workbench中进行分析。

图3 三维模型
在静态结构分析工具箱中进行静力学分析,找出最大破坏位置,再使用疲劳分析工具 Fatigue Tool进行计算。
由于动杆结构简单,因此使用完整模型做有限元分析,将模型使用Mesh命令划分网格,最终划分结果为:节点数5 952个,单元数2 948个,划分好网格的有限元模型如图4所示。
材料使用的是Q235钢,在模型中定义材料特性,弹性模量E=200 GPa,泊松比μ=0.3,密度使用Workbench中默认的钢密度ρ=7 850 kg·m-3[9]。
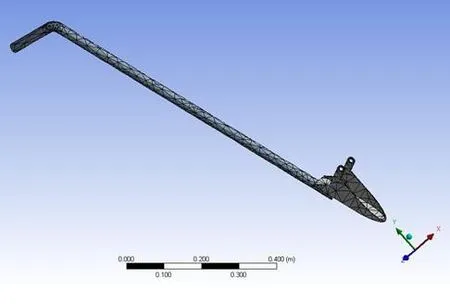
图4 动杆有限元模型
3 静力分析
使用Workbench中的static分析模块进行静力学分析,动杆的约束端为转动销孔处,受力点为鸭嘴外表面和手柄位置。由受力平衡计算手柄处的力约为鸭嘴受力的1/4,约为350 N。由于土壤并不是均匀实体,且受力大小随着入土深度增加而变化,情况较复杂,为解决问题,本文将入土鸭嘴处施加集中力代替原来的复杂分布载荷。分析结果如图5 ~ 6。
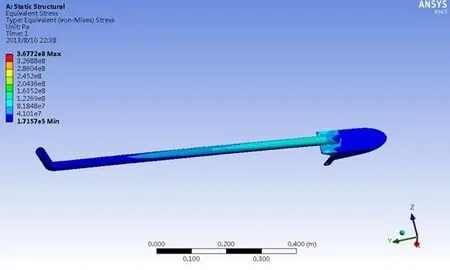
图5 等效应力云图
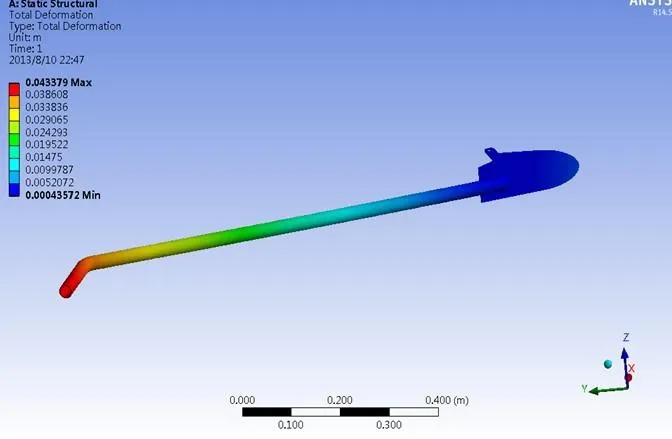
图6 位移云图
由图 5可以看出最大应力并不是出现在销孔处,而是鸭嘴与手柄焊接位置及其过渡部分,最大可达到3.677 2×108Pa,焊接质量将会严重影响产品的整体质量,因此在焊接工艺中应采取一定措施,打磨焊接处表面,以减小由于表面不平整及焊接时高温引起的变形等带来的应力影响。由图6可以看出在手柄处位移最大,这是由杠杆作用产生的,以鸭嘴销孔处为固定点,手柄处于杠杆的长端。考虑实际情况,以整个鸭嘴的位移为研究对象,最大位移小于5.207 2 mm。

图7 安全因子云图
由图7可以看出,最小安全因子位置在焊接处及其过渡区域,最小值仅有0.260 47,结合图5可知,焊接质量的好坏是质量控制的关键。另外在销孔附近区域的安全因子也较低,在设计当中应考虑适当放大安全系数。
疲劳破坏一般是有疲劳源,然后再从疲劳源逐渐扩张,在交变载荷的持续作用下,扩张到部件的静强度不足时突然断裂,但是整机或部件的设计寿命未到,因此其危害极大。疲劳源通常是难以准确预知的,由图8可以看出在焊接的过渡区域将有可能出现疲劳源,是寿命最薄弱的地方,由本文设定工况下的循环寿命最低仅为4 857.5次,其它部分最大循环寿命可以达到1× 106次。
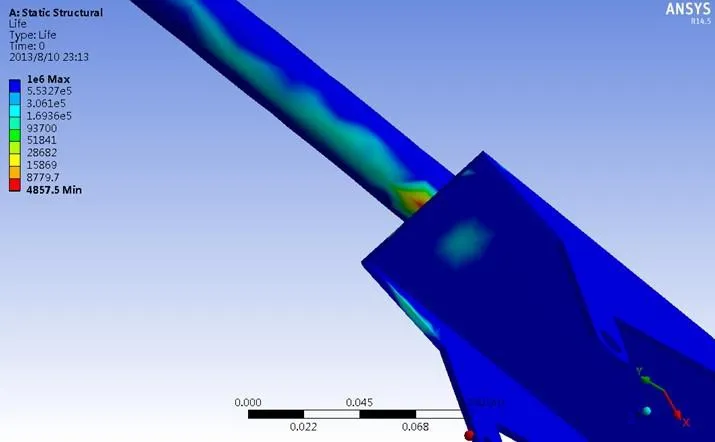
图8 疲劳寿命云图
图9为疲劳敏感性图,描述的是在基本载荷的50% ~ 150%的范围内循环寿命的次数。由图可知,在100%载荷条件下循环寿命约为5 000次,随着载荷比例增加,寿命逐步降低。在50%的的载荷条件下有5× 1 05次以上的循环寿命。
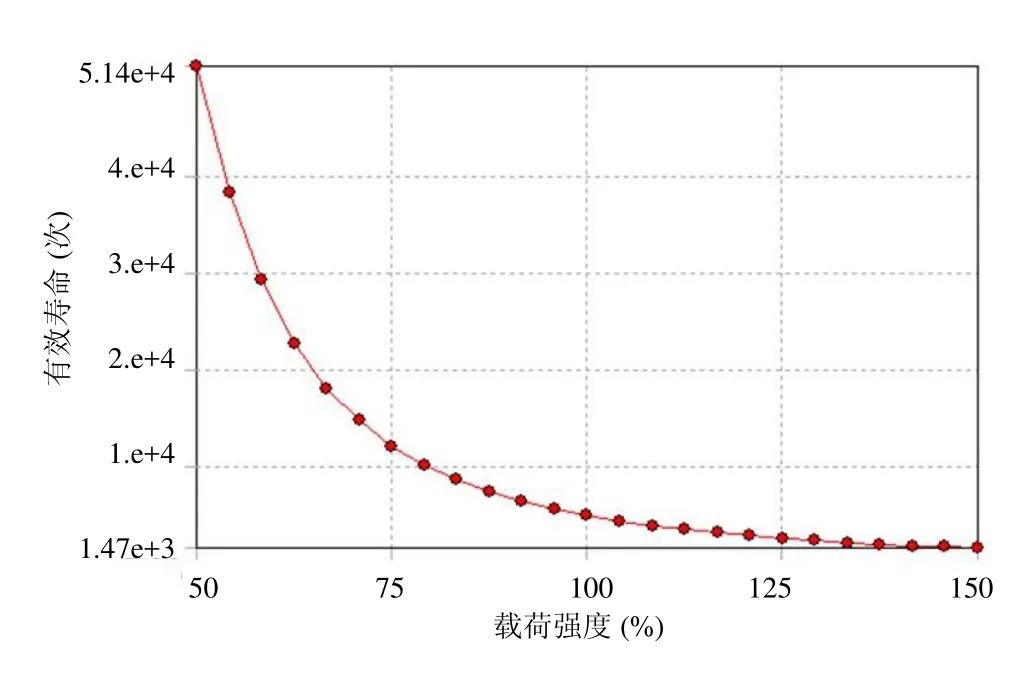
图9 疲劳敏感性图
4 结论
(1) 手持式桉树幼苗种植器动杆的薄弱位置是鸭嘴与手柄焊接位置及其过渡部分,在本文的设定工况下最大破坏应力可达到3.677 2×108Pa。
(2) 动杆的最小安全因子位置在焊接处及其过渡区域,另外销孔附近安全因子也较小;最小安全因子仅为0.260 5。
(3) 在100%载荷条件下循环寿命约为5 000次,主要在焊接处及其过渡区域出现疲劳源。
(4) 焊接工艺是动杆的设计关键因素,焊接区域的质量极大地影响了疲劳寿命。综上所述,该种植器的受力限度、安全因子及循环寿命的限制因素均出现在焊接部位,因此在设计时,应以此为最大考量,并着重考虑焊接处的焊接质量。
[1] M idgley S J.Making a difference: celebrating success in Asia[J].Australian Forestry,2013,76(2):73‒75.
[2] 陈少雄.不同施肥措施对桉树优势高生长的影响[J].桉树科技,1994(2):15‒19.
[3] 李雪芹.机械扰动对土体稳定性的影响研究[D].石河子:石河子大学,2011.
[4] 刘新忠,高召民,李敬文.HHLJK-1型幼苗多用移栽器在黄河种植中的应用[J].现代制造技术与装备,2011(4): 74‒75.
[5] 张彦英,顾正平.直铲式树木移植机下铲阻力的探讨[J].北京林业大学学报,1988,10(2):38‒45.
[6] 薛忠,黄晖,李明,等.4UMS–390Ⅱ型木薯收获机的研制[J].农机化研究,2010,32(8):79‒81,85.
[7] 宋海兵,王春宏.树木移植机下铲过程土壤与铲刀接触受力分析[J].林业机械与木工设备,2013,41(2):42‒43,46.
[8] 姚宗路,高焕文,李洪文,等.不同结构免耕开沟器对土壤阻力的影响[J].农机化研究,2009,31(7):30‒34.
[9] 付建勋,李京社,汪春雷,等.Q235钢杨氏弹性模量的研究[J].材料导报,2009,23(18):68‒70.
Analysis of Rod Fatigue Dynam ic Hand-held Seed ling Planting Device
WEN Xiao-xia1, XUE Zhong2, CHEN Shao-xiong3, LI Hui3
(1. Department of Information, Cunjin College of Guangdong Ocean University, Zhanjiang 524094, Guangdong, China; 2. Agricultural Machinery Institute of CATAS, Zhanjiang 524094, Guangdong, China; 3.China Eucalypt Research Centre, Zhanjiang 524022, Guangdong, China)
The hand-held seedling planting device is a simple auxiliary tool which can be used in seedling transplantation; it w ill be widely used during to the unavailable mechanical operation under the small forest area and mountainous region. In this study, the rod part of the hand-held seedling planting device would be modeled through the SoldiWorks software and the Finite static analysis could be conducted w ith introducing the Ansys-Workbench software. Based on these works, the fatigue analysis can be conducted, the weak areas can be found and the life curve can be drew. According to the analysis, the maximum fail stress is 3.677 2 × 108Pa,the minimum safety factor is 0.260 47,the cycle life was about 5 000 times under full load. The limit factor is the welding position.
seedling planting device; fatigue analysis; Workbench
S223.9
A
2014-02-10
国家林业局948技术引进项目“巴西桉树杂种及标准化施肥技术引进”(2013-4-36)
温晓霞(1984— ),女,硕士,助教,主要从事MOCVD技术与光电子器件研究.E-mail:wenxiaoxia.8401@163.com
*通讯作者:李慧(1984— ),男,硕士,助理工程师,主要从事桉树培育研究.E-mail:li.hui.cool.love@163.com
猜你喜欢
中国交通信息化(2022年2期)2022-04-26
河北农机(2021年11期)2021-11-29
电子制作(2019年19期)2019-11-23
孩子·小学版(2019年11期)2019-09-10
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
环球时报(2019-01-03)2019-01-03
农业机械学报(2018年11期)2018-12-04
农业机械学报(2017年9期)2017-10-11
广西林业科学(2016年2期)2016-03-20
广西林业科学(2016年4期)2016-03-16