三轴AMR车辆检测器的车型分类设计实现
2014-07-18 11:55蔡伯根赵济民王剑刘江王忠立
交通运输系统工程与信息 2014年4期
蔡伯根,赵济民,王剑,刘江,王忠立
(北京交通大学,北京100044)
三轴AMR车辆检测器的车型分类设计实现
蔡伯根,赵济民,王剑*,刘江,王忠立
(北京交通大学,北京100044)
随着城市机动车数量的不断增加,城市交通向智能交通方向的快速发展,传统的车辆检测器已经不能满足智能交通对交通状况反映的要求.车辆检测器的车型分类功能成为检测器发展的趋势,针对目前AMR车辆检测器弱化车型结构对磁场强度影响的问题,设计了一种新型的AMR车型识别检测器.单个检测器可以采集三个方向地磁变化量,结合一个高精度的时间模块,可以获得磁场强度在立体三维空间的变化,丰富了采集信息.通过比较常见的车型分类算法优缺点,采用DAG-SVM进行车型分类.实验测试的结果表明,该检测器可以有效地对车辆进行分类.
智能交通;车辆识别;导向无环图支持向量机;各向异性磁阻
1 引言
统计数据表明,到2012年底,全球机动车总量将超过10亿,而我国机动车总量在2012年6月已经达到2.33亿辆[1].在我国迈入私家车时代的同时,交通拥堵、事故频发、能源消耗和环境污染等社会问题日趋严重.解决城市交通问题迫在眉睫,智能交通系统应运而生.车辆检测器为智能交通系统各项功能的展开提供原始数据信息,车辆检测技术作为智能交通系统的基础组成部分,其准确性和实时性直接影响整个智能交通系统的有效性.在机动车保有量不断增加的背景下,车辆种类也越来越多,单一的计量车辆数量的车辆检测器,已经不能满足智能交通系统对日益丰富的交通状况的反映要求,检测器的车型分类研究成为一个研究重点.
车型分类是通过传感器检测车辆固有的参数,在一定车型分类标准下运用适当的分类算法,对车辆进行车型分类.近年来高灵敏度、低成本、小体积的地磁传感器成为一种新型的车辆检测器进入研究范围,Saowaluck Kaewkamnerd等人[2,3]基于地磁传感器提出了多种不同算法的车型分类方法,基本思想都是通过同一车道间隔一定距离的两个传感器节点采集数据的时间差来获得车速,车速与车辆波形在任意检测器上的停留时间相乘得到车长,从而识别车型.这种车型分类方式只依靠于车长度,弱化了车辆形状和构造对地磁场强度的影响,对传感器节点间的同步时间精度要求较高,所以长时间运行的分类正确率较低.
通过比较目前车型分类车辆检测器,受视频三维重建思想的启发,结合地磁传感器的高灵敏度特性,本文提出了一种新的分类方法,该方法通过单个节点结合了三轴地磁传感器采集地磁信息,对三维地磁信息进行车型长、宽、高比例重组,然后进行车型识别.这种车型分类方法综合考虑了车辆形状和构造对地磁场强度的影响,不需要节点间的时间同步,降低了采集信息的原始误差,提高原始数据的准确性.
常用的车型分类算法包括神经网络[4]、模糊模式识别[5]和支持向量机(Support Vector Machine,SVM)[6]等,表1给出了三种分类算法的比较.
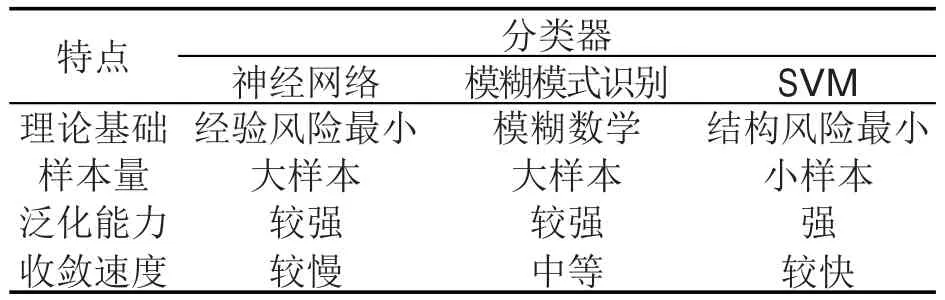
表1 常见分类器比较Table 1 Comparison of common classify algorithm
由表1比较可见,寻求结构风险最小的支持向量机相比传统追寻经验风险最小的分类器有更好的泛化能力,收敛速度也比较快,虽然支持向量机不能直接解决多分类问题,但是通过多个二分类支持向量机的组合可以很好地解决车型分类问题.
基于上文分析,本文采用了三轴传感器采集地磁信息加导向无环图支持向量机(Directed Acyclic Graph Support Vector Machine,DAG-SVM)算法的设计,完成了车型分类的功能,下面将对具体设计过程及实验结果进行详细分析.
2 AMR传感器检测原理
AMR传感器利用的是导体材料的各向异性磁阻效应,导体材料在磁场的作用下,其电阻率随磁化强度方向与电流方向变化而变化的现象叫各向异性磁阻效应(Anisotropic Magneto Resistive, AMR).坡莫合金是一种铁镍合金,具有很好的各向异性磁阻性,成为AMR传感器的制作材料. AMR传感器的工作原理是利用四个坡莫合金制作的电阻组成一个惠斯通桥,如图1所示.图中惠斯通桥中,R1和R3,R2和R4的坡莫合金缠绕方向分别一致.
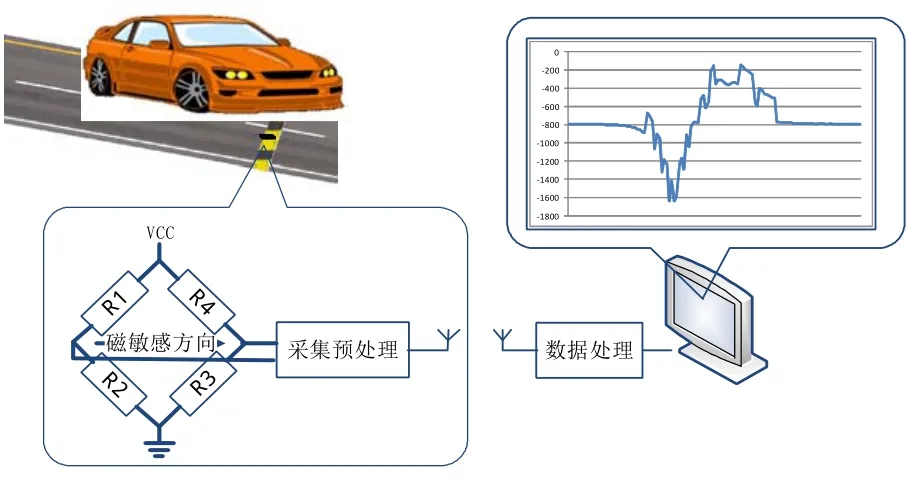
图1 AMR传感器检测原理Fig.1 AMR sensor detection principle
AMR车型分类检测器通常是采集垂直地面的一维方向上磁场强度变化,只考虑车辆长度对车型的分类,减弱了车辆整体结构形状对地磁场强度的影响.本文设计的信息采集节点采集的数据包括立体三维方向上的磁场强度变化,车辆经过时对地磁场强度的影响如图2所示.
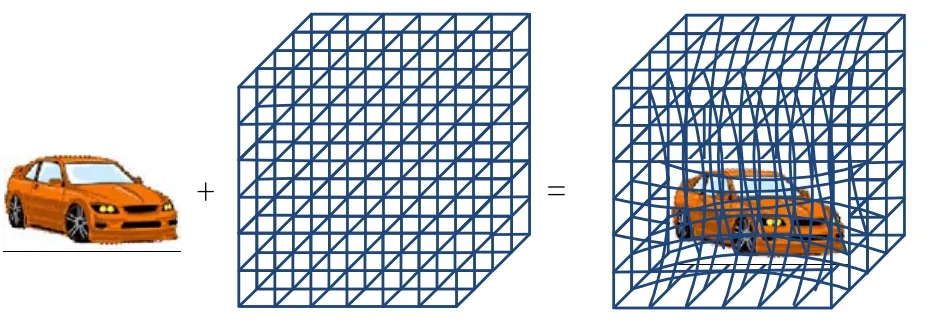
图2 磁场影响Fig.2 Geomagnetic influence by vehicle
三轴磁敏传感器获取到的车型特征包括车长、车宽和车高信息,通过三者时间的微小差异关系及峰谷值间的比例关系,获取的车型特征值更加丰富,并且综合考虑了车辆形状结构等因素,时间取自于一个检测器节点上的高精度时间模块,对节点间的时间同步精度的要求也大大降低了.
3 系统设计
3.1 硬件设计
完整的地磁信息采集节点包括信号采集、时间同步、电源管理、射频前端及主控制单元(MCU)五个部分,如图3所示.
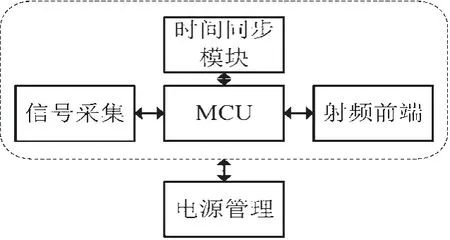
图3 地磁信息采集节点框图Fig.3 Geomagnetic collector node block diagram
●信号采集模块的功能是实时采集磁场强度,本文选取Honeywell公司的HMC5883芯片,通过IIC接口与MCU传输数据,方便控制与信息传输,采样频率为50 Hz,可以达到车辆检测及识别的信息采集要求.
●时间同步模块主要提供终端采集节点数据变化的微小时刻变化,设计选取了意法半导体公司的M41T81时钟芯片,最小时间精度可以达百分之一秒,通过IIC接口与MCU通信,最低工作电流仅1 uA,满足节点对时间以及功耗的要求.
●电源管理模块使用的是TI公司的lp2980芯片,电源芯片的低功耗模式电流小于1 uA,通过电源的模式转换来对整个节点进行动态电源管理,可以将功耗降到最低.
●射频传输采用的是Zigbee通信协议,考虑信息采集节点的功耗及对无线传输的要求,主控芯片使用的是TI公司的CC2530,CC2530芯片中RF收发器和增强型的8051单片机结合于一体,多种运行模式使其适合超低功耗的系统.
地磁信息采集节点采用大容量锂电池供电,考虑到采集节点通信距离,地磁信息采集节点设计为两块电路板,主控制单元与射频前端设计成一体,传感器采集电路、时钟电路和电源管理电路等以扩展板的形式与主控板连接.实物如图4所示.

图4 地磁信息采集节点实物图Fig.4 Physical map of geomagnetic collector node
3.2 车型分类系统监测软件设计
处理与存储单元机器上的车型分类系统监测软件的主要功能,包括启动阶段对地磁信息采集单元及视频数据采集单元进行时间同步,运行阶段对视频和地磁信息的处理,显示及存储.图5表示车型分类系统软件主流程.

图5 车型分类系统软件主流程Fig.5 Main loop of vehicle classification system
从图5可以看出,车型分类是车型分类系统监测软件的核心.从地磁采集节点传回处理单元的是原始电平数据,在进行车型分类识别之前,需要从原始电平数据中提取出特征值.

图6 车辆数据特征示意图Fig.6 Sketch map of vehicle feature
图6是车辆经过传感器时,Z轴上采集的典型磁场变化曲线.车辆数据特征提取流程如下.
●比较实时磁场强度与背景地磁场场强度α的差值,差值超过自抖动的阈值β即判断有车辆,开始进行特征提取.
●特征提取阶段,分别对正负磁场变化量进行累加,同时判断磁场变化趋势,变化趋势改变时,获得一组极值数据,极值数据间比较获得波峰、波谷数据.
●在连续τ秒内差值进入自抖动范围,判断车辆经过结束,特征提取结束.
根据三轴AMR传感器采集的数据,提取出车长、车高、车宽三个方向上的波峰、波谷、正负平均磁场变化量等24个特征向量.
实验场地的变化,背景地磁场强强度α会有差异,并且背景地磁场强度在长时间范围内会受温度等的影响出现漂移,为了避免影响程序的鲁棒性,本文采用动态背景基准值的方法来判断车辆,在没有车辆经过的时候,周期性更新背景地磁场强度.
4 车型分类算法设计
车型分类的主要用途包括指导交通路线规划、交通状态统计及快速交通收费等.我国根据汽车工业发展情况和国外车型分类情况制定过车型标准,该标准将车辆分为汽车、挂车和汽车列车三大类,每大类又细分为许多小类,种类过多且繁杂,不易快速分类而且针对于具体应用不具有实用性.本文参考国内国际车型分类标准,根据实际各类车辆的具体分布情况将车辆按形状分为小汽车、SUV(包括中型面包)、大客车和货车四种类型,如图7所示,基本上涵盖了城市中常见车辆,具有很好的实际应用性能.
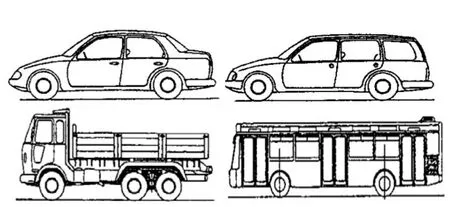
图7 车型分类类型标准Fig.7 Standard of vehicle classification
车型分类算法是基于支持向量机算法.支持向量机是Vapnik等人在研究多年统计学习理论的基础上对线性分类器提出的一种新的算法,它是在高维特征空间使用线性函数分类空间的学习系统[7].在车型分类的应用中,必须对多类型进行区分,支持向量机是典型的两类分类器,利用两类分类器得到多分类器,有两种方式:
(1)一次性考量所有样本,并求解一个多目标函数的优化问题,一次性得到多个分类面.这个思路看起来很好,但是暂时这种算法还停留在理论上,因为求解一个多目标函数的优化方法的计算量实在太大,大到基本上无法实用.
(2)建立多个分类器,通过多次分类来确定最终类型,目前多使用这种思路.这种多分类SVM根据分类库的训练,以及分类方式选择可以分为“一对多”、“一对一”和“DAG-SVM”.
例如类别数为n(n>2).表2对三种多分类SVM方法进行了比较.

表2 多分类SVM方法比较Table 2 Comparison of multiple classification SVM
如表2所示,“一对多SVM”方法需要建立n个Ai和-Ai的分类器,一次完整的分类需要进行n次分类识别,才能得到结果,但是由于Ai和-Ai之间数据的不对等性会出现人为的数据集偏移,大大降低分类的精度,并且可能会出现不能分类的情况.
“一对一SVM”方法需要建立n·(n-1)/2个Ai和Aj分类器(i≠j),需要进行n·(n-1)/2次分类识别才能得到一次完整分类结果,分类次数太多导致分类速度较慢.
相比之下,DAG-SVM是一个不错的选择,虽然需要建立n·(n-1)/2个分类器,但是只需要进行n-1次分类即可得到结果,分类迅速、且不会出现不可分类和数据偏移等现象.但是DAG-SVM的缺点是会有累积误差,一旦某一个分类器出现分类错误,就会导致结果的错误.针对这一缺点,利用有限样本对真实分布做近似估算,相对距离越大的两类样本表面具有更好的可分性,先统计各个分类器的可分性即分类正确率,将分类正确率高的分类器参与最先的分类,这样可以减小累积误差.
根据上文的分类标准,车辆分为四类,即n为4,需要建立6个分类器.根据6个分类器的分类准确度从高到低将6个分类器进行排序,分类准确度高的分类器放置于导向无环图的前面,例如小汽车与公交车分类器分类准确度最高,所以把小汽车与公交车分类器放置于无环图的根部,如图8所示,经过三次车型分类即可得到车型.
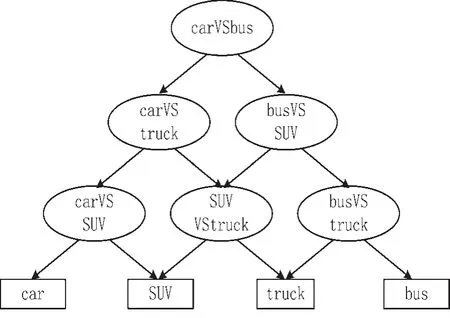
图8 导向无环图分类结构图Fig.8 DAG classification structure
5 系统实现及分析
5.1 系统实现
本文设计了一个车型分类平台来验证车型分类的正确性,平台系统的整体架构如图9所示.整个系统包括两个部分——现场信息采集子系统与信息处理子系统.现场信息采集子系统包括地磁信息采集单元和视频信息采集单元,视频信息辅以对地磁信息的校验,信息处理子系统主要包括数据的处理、显示以及存储.
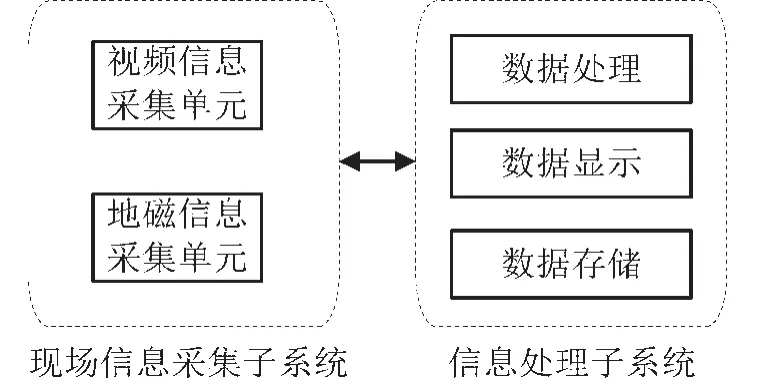
图9 车型分类系统组成框图Fig.9 Vehicle classification system block diagram
搭建整个系统实验前,一个重要的步骤是收集四类车辆的地磁信息特征制作成分类器,视频采集设备与地磁采集传感器同步采集,人工根据地磁采集信息结合同步采集视频信息制作原始特征库.然后根据原始特征库制作分类器,制作分类器使用的是的libsvm-3.17[8]软件.
车型分类系统监测软件界面如图10所示,软件的目的是通过视频数据对地磁分类数据进行分类准确性的校正,功能包括处理、显示及存储地磁信息与视频数据.

图10 车型分类系统监测软件界面Fig.10 Software interface of vehicle classification system
5.2 实验结果分析
使用所设计车型分类系统进行实地车辆检测实验,测试地点包括北京交通大学校内思源主楼后道路和北京交通大学西门外的高粱桥斜街.校内主道由于行人较多,所以实验车速维持在30-40 km/h,高粱桥斜街路段路况比较顺畅,车速为60-70 km/h.图11是在北京交通大学西门外高粱桥斜街实地车辆检测实验的图片.
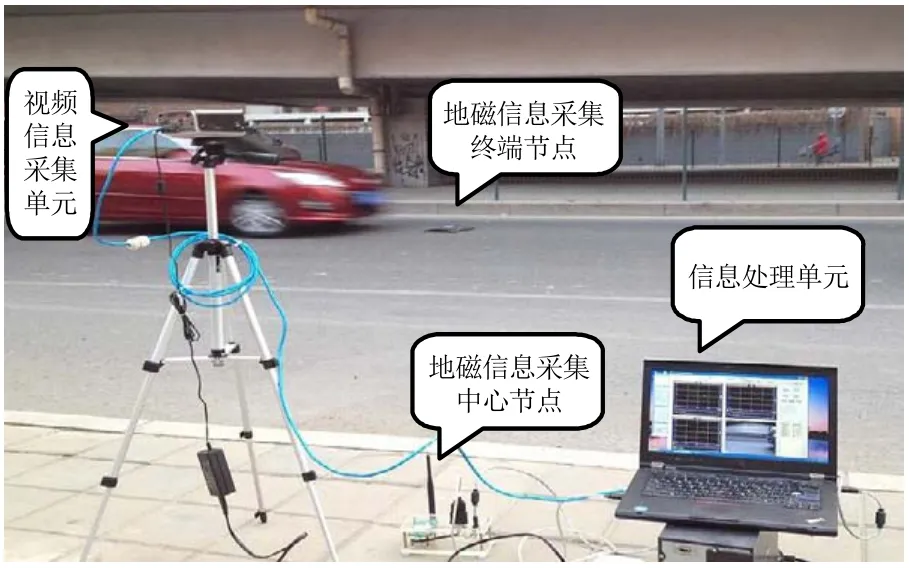
图11 实地测试图Fig.11 Image of Field tests
室外场地实验时,传感器放置于车道中央,车辆从传感器采集节点上方驶过,协调器节点接收信息通过串口上传上位机实时显示,在对信息的预处理判断检测到车辆时,触发视频采集设备采集单独图片,并计数,通过视频回放与照片数量,可以得到实际通过车辆数和检测车辆数,通过对照图片与分类结果可以得到分类正确车辆数.实际实验时,τ取0.18 s,即连续0.18 s实时地磁变化量的差值进入自抖动范围即判断为车辆完全通过,100 km/h的两辆车只需要距离大于5 m即可分辨出来.
实验采集数据离线通过三种多分类SVM算法进行分类,输入为24个特征向量,核函数采用的是径向基核函数,惩罚因子C越大,拟合程度越好,但是过大反而会出现过拟合,即泛化性差,惩罚因子的选取直接关系到分类器的泛化性能.表3所示为三次惩罚因子选取实验的实验结果.

表3 惩罚因子取值结果比较Table 3 Comparison of classification results
如表3数据所示,C取较小的数值时,训练样本和新样本的分类正确率均不高;C取较大值时,训练样本分类正确率高达99.09%,而测试样本分类正确率反而降低到了84%.原因是C值取值过大,对训练样本的依赖性增加,结构风险趋近于经验风险,所以导致测试样本分类正确率降低,经过多次实验比较,惩罚因子C取20时,比较合适.
如上述实验结果,惩罚因子C取20.多分类车型识别实验结果如表4、表5所示.

表4 车辆检测DAG-SVM算法识别结果Table 4 Results of vehicle classification based on DAG-SVM
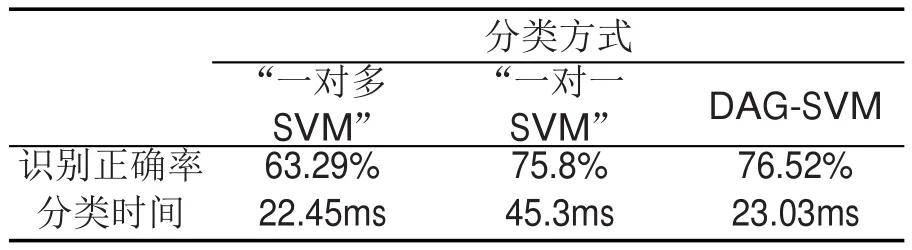
表5 场地车辆检测多分类SVM算法结果比较Table 5 Comparison of multi-classification SVM algorithm
由表4可以看出车辆检测数与实际车辆数大体相符.通过实际观察,由于检测器是临时放置于每条车道的中央,而有的车辆从两条车道中间通过,被检测器认为是传感器自抖动而忽略.SUV和货车车型分类正确率较低.经过数据分析发现,原因主要有两点:①货车数据较少导致分类时因为数据倾斜产生的分类正确性较差;②SUV与私人汽车车型长度相差不大,而没有对这一情况进行具体的特征优化,导致SUV车型分类正确率较低.这两点可以由增加数据采集和对特征集进行优化得到解决.
整体车型分类正确率与参考文献[3]中的分类正确率相比相差不大,但是本文创造性的使用单个检测节点实现车型分类,强化了车辆形状和构造与分类性能之间的关系,降低了节点间同步误差对分类性能的影响,提高了原始数据的准确性,有利于提高长期分类性能.
实验是在Dell OPTILEX 780(内存2G;CPU 2.93GHz,双核)工控机上进行的,由表5比较可以看出,“一对一SVM”和DAG-SVM较“一对多SVM”正确率高,分类时间由于比较小,是通过对100辆各类车辆的数据进行分类得到的,可以看出“一对一SVM”分类时间比较长,通过比较三种多分类支持向量机算法,可以直观分析出DAG-SVM的优势,总体分类精度达到76.52%,说明这个算法是可行的,但是SUV和货车的分类精度偏低,说明算法还需要进一步改进.
6 研究结论
传统地磁车型分类检测器使用单轴的传感器,通过一组传感器采集节点检测车长或者车轴数识别车型,这种车型分类检测器过度依赖组内采集节点之间的时间同步精度,长期识别效果不太理想.本文提出了一种新的设计,利用AMR传感器的方向性,采用三轴地磁传感器采集三个方向上车辆对地磁场强度影响的数据,丰富了采集数据与车辆形状间的关联;单个采集节点完成数据采集,对同步时间要求降低,减小了原始数据的误差,长时间运行不会影响分类精度.本文提出的车型分类检测器具有低成本、高精度等特性,在智能交通信息采集方面具有很高的实用性.
[1]2012年7月份全国机动车总数调查统计[EB/OL], (2012-07-18)[2013-12-30].http://www.chinairn.com/ news/20120718/936214.html.[Survey of national vehicle number in July 2012[EB/OL],(2012-07-18)[2013-12-30].http://www.chinairn.com/news/20120718/936214. html]
[2]Saowaluck Kaewkamnerd,Jatuporn Chinrungrueng,et al. Vehicle classification based on magnetic sensor signal [C].2010 IEEE International Conference on Information and Automation,2010:935-939.
[3]Saowaluck Kaewkamnerd,Ronachai Pongthornseri,et al. Automatic vehicle classification using wireless magnetic sensor[C].Procedings of 2009 IEEE International Inter⁃national Workshop on Intelligent Data Acquisition and Advanced Computing Systems:Technology and Appli⁃cations:420-424.
[4]Yong-Kul Ki,Doo-Kwon Baik.Vehicle-classification al⁃gorithm for single-loop detectors using neural networks [J].IEEE Transactions on Vehicular Technology,2006, 55(6):1704-1711.
[5]王明哲,吴皓,周丰.基于地磁的车型识别模糊数据融合方法研究[J].公路交通科技,2008,25(1):155-158. [WANG M Z,WU H,ZHOU F.Research of fuzzy data fu⁃sion based on geomagnetism for vehicle mype identifica⁃tion process[J].Journal of Highway and Transportation Research and Development,2008,25(1):155-158.]
[6]冯超,贺俊吉,史立.基于支持向量机的轿车车型识别[J].上海海事大学学报,2011,32(3):85-89.[FENG C, HE J J,SHI L.Recognition of car model based on support vector machine[J].Journal of Shanghai Maritime Univer⁃sity,2011,32(3):85-89.]
[7]Vapnic.Stastical learning theory[M].NewYork:John Wiley&Sons Inc:1998.
[8]Chang Chih-Chung,Lin Chih-Jen.LIBSVM:A library for support vector machines[J].ACM Transaction on Intelli⁃gent Systens and Technolgy,2011,2(3):1-27.
Design and Implementation of Vehicle Classification Based on 3-axis AMR Vehicle Detector
CAI Bai-gen,ZHAO Ji-min,WANG Jian,LIU Jiang,WANG Zhong-li
(Beijing Jiaotong University,Beijing 100044,China)
ract:With the increasing number of motor vehicle,urban transport is widely assisted by intelligent transportation system(ITS),.Traditional vehicle detector cannot meet the requirements of ITS’s reflection on traffic condition,the function of vehicle classification has
great attentions.Current AMR vehicle classification detector classify vehicle by the length of vehicle but the vehicle structure.To solve this problem,this paper designs a new kind vehicle classification detector.A single detector can collect three directions’geomagnetic variation,and magnetic field strength changes in three-dimensional space can be gained with the combination of a high-precision time module,which enriches the collected information.By comparing the pros and cons of common vehicle classification algorithms,DAG-SVM is selected to classify vehicles.The experimental test results prove the effectiveness of vehicle classifier detector designed in this paper.
rds:intelligent transportation;vehicle classification;DAG-SVM;AMR
1009-6744(2014)04-0046-07
TP212.9
A
2013-12-10
2014-02-25录用日期:2014-02-27
国家自然科学基金(61273089,61104162);北京市自然科学基金资助项目(4144081);中央高校基本科研业务费专项资金资助(2012JBZ009).
蔡伯根(1966-),男,江苏如皋人,教授,博士生导师. *
wangj@bjtu.edu.cn
猜你喜欢
中华养生保健(2020年7期)2020-11-16
中国交通信息化(2017年9期)2017-06-06
家教世界·创新阅读(2016年11期)2016-12-27
天津护理(2016年3期)2016-12-01
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
故事会(2016年15期)2016-08-23
工业设计(2016年11期)2016-04-16
电测与仪表(2014年15期)2014-04-04
河南科技(2014年22期)2014-02-27