伪球面运动与孤子方程及其Backlund变换
2014-07-19 06:58房春梅樊彩虹
赤峰学院学报·自然科学版 2014年20期
房春梅,樊彩虹
(集宁师范学院 数学系,内蒙古 乌兰察布 012000)
伪球面运动与孤子方程及其Backlund变换
房春梅,樊彩虹
(集宁师范学院 数学系,内蒙古 乌兰察布 012000)
本文在伪球面的两种不同的运动下获得了两个新的孤子方程,并利用孤子方程的2×2线性表示在规范变换下的不变性获得了这两个方程的Backlund变换.
伪球面运动;孤子方程;Backlund变换
1 前言
从静止的伪球面自然地获得了Sine-Gordon方程,那么运动的伪球面必然能够产生一系列的孤子方程.这些孤子方程均包含Sine-Gordon方程.本文主要考虑伪球面的两种不同的运动,从而导出两个新的孤子方程,最后构造这两个方程的Backlund变换.
2 伪球面运动

其中η=η(t),ø=ø(u,v,t)是关于u,v,t的函数.
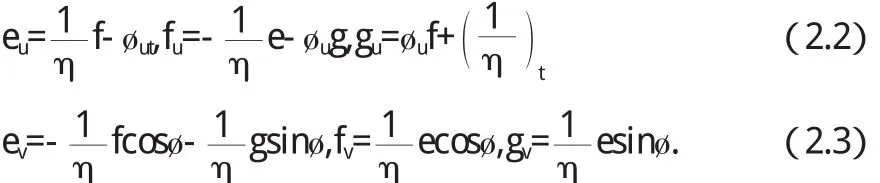
由正交标架{A,B,C},可以得到保持正交性质的时间演化:

其中e,f,g是关于u,v,t的实函数.
已知,Gauss-Weingarten系统与(2.1)之间满足相容性条件可得:

将上式展开后
假设伪球面∑的运动速度在正交标架{A,B,C}下的形式为

则由A=ru,B=-rucosø+rvcosecø,C=N可得到:

利用正交标架{A,B,C}上的时间演化保持正交性获得如下式子
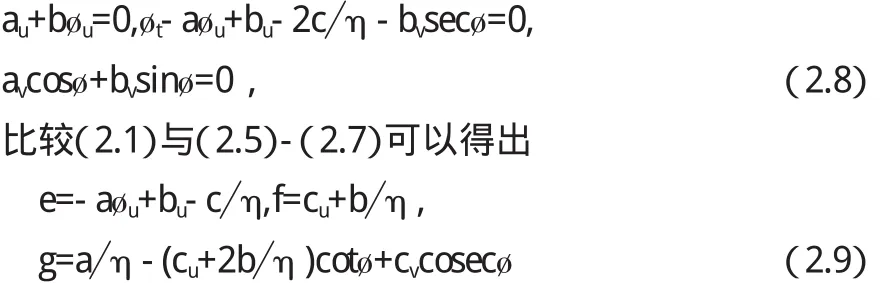
将(2.9)代入(2.2),(2.3)可得到如下条件
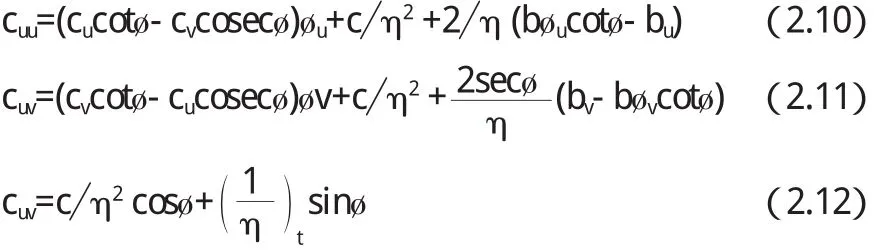
因此可以得出伪球面的运动需要满足的可行的演化条件是(2.8),(2.10)-(2.12).
取满足上述演化条件(2.8)以及(2.10)-(2.12)的两种不同的运动如下所示

从而可以得出如下两个新的孤子方程为:

其中η˙=0,σ(t),ω(t)为任意函数.
3 Backlund变换
本小节从方程(2.1)的2×2线性表示出发,利用一个规范变换来获得孤子方程(2.14)与(2.15)的Backlund变换[3].具体如下:

由关系式

由规范变换Ψ2=QΨ1以及(3.1)-(3.3)可以得出

其中

同样利用伪球面∑2上的正交标架{E2,F2,G2}以及条件E2=r2,u,F2=-r2,u×N2,G2=N2,可以设Γ2=ΛΓ1,其中

已知Γ1,Γ2∈SO(3),从而Λ∈SO(3).再利用同构关系so(3)↔su(2),能得到一个包含于SU(2)的转换矩阵[4]为如下所示:

由规范变换Ψ2,=Q(θ,ξ)Ψ1以及(3.1)-(3.3)能得到如下式子


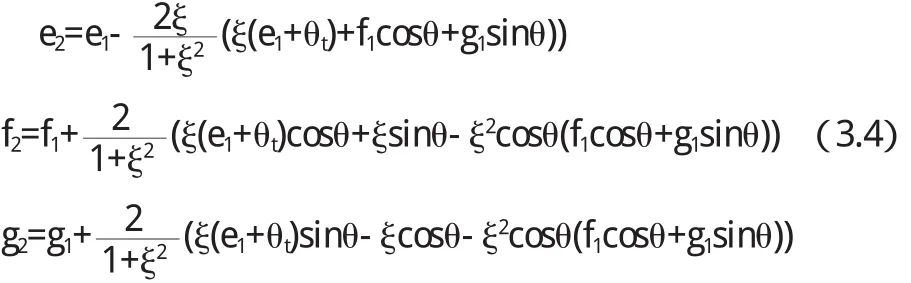
其中
由关系式(3.4)可以得出上述两个新的孤子系统的Backlund变换.
对于孤子方程

利用关系式(2.9),(3.4)可以得到如下式子:

从而可以得出其Backlund变换为:

对于孤子方程

利用关系式(2.9),(3.4)可以得到如下式子:

从而可以得出其Backlund变换为:

〔1〕Doliwa A,Santini P.An elementary geometric characterization of the integrable motions of a curve[J].Phys.Lett.A 1994,185:373-384.
〔2〕Rodica Cimpoiasu,Rodu Constantinescu.Lie symmetries and invariants for a 2D nonlinear heat equation[J].Nonlinear Analysis,2008,68:2261-2268.
〔3〕Rogers C,Schief W K.Backlund and Darboux transformations[M].New York:Cambridge University Press,2002.
〔4〕Fan EG,Zhang HQ.A new approach to Backlund transformation of nonlinear evolution equations[J].Appl Math Mech 1998;19(7):645-650.
O175
A
1673-260X(2014)10-0009-02
内蒙古高等学校科学研究资助项目(NJZC13283)
猜你喜欢
河北地质大学学报(2021年6期)2021-12-16
语数外学习·高中版中旬(2021年1期)2021-09-10
中学生数理化·高一版(2020年3期)2020-04-21
数学物理学报(2020年1期)2020-04-21
数学大世界·中旬刊(2020年2期)2020-04-16
中国宝玉石(2018年3期)2018-07-09
读友·少年文学(清雅版)(2018年4期)2018-01-14
中学化学(2017年6期)2017-10-16
厦门理工学院学报(2016年1期)2016-12-01
中学生数理化·七年级数学人教版(2016年4期)2016-11-19