HPRF雷达距离延拓检测前跟踪方法
2014-07-25 11:29张林让胡子军
西安电子科技大学学报 2014年5期
张 鹏,张林让,胡子军
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
HPRF雷达距离延拓检测前跟踪方法
张 鹏,张林让,胡子军
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
针对高脉冲重复频率(HPRF)雷达弱小目标检测前跟踪的距离模糊问题,提出了一种基于距离延拓的检测前跟踪方法.该方法采用多重频参差工作模式,对动目标检测器(MTD)处理后的数据进行预处理,并按照不同的距离模糊数进行距离延拓.通过多重频组内直接能量积累和组间的航迹能量积累获取最大的目标能量.最后,采用航迹凝聚策略消除由动态规划算法引起的航迹团聚效应,依据虚假目标与真实目标的相关性去除由低信噪比而引起的虚假目标航迹.在未知目标初始化状态的情况下,该方法提高了对弱小目标的检测性能.仿真结果表明了该方法的有效性.
高脉冲重复频率;距离延拓;距离模糊;状态估计;动态规划;检测前跟踪
检测前跟踪(TBD)[1]技术是一种检测和跟踪弱小目标的有效技术.典型的TBD算法有Hough变换、动态规划[2-5]和粒子滤波[6-8]等算法.对于高重频雷达,由于存在距离模糊问题,常规的TBD算法无法对航迹能量进行有效的积累,影响了弱小目标检测效果.因此,解决距离模糊下的TBD检测问题具有重要的意义.
国内外学者针对高重频雷达TBD检测技术做了初步的研究[9-12].其中文献[9]将动态规划算法(DP-TBD)应用到高重频雷达中,提出了DP-TBD算法的信号处理流程,并提出基于目标能量的测量值与航迹平滑度选择最佳试验航迹.但是,文献[9]未考虑因距离模糊而导致目标航迹不连续,即发生跳变的问题.为此,文献[10]提出了一种改进的DP-TBD算法,利用目标初始状态信息对目标后续状态进行估计,并进行航迹跳变判决,再根据判决结果选择动态规划搜索策略,进而得到最优的目标试验航迹.文献[11]提出了高重频下点迹动态规划算法,通过在航迹判决为跳变时修正距离转移步长,使目标能量沿着模糊后航迹有效地积累.文献[10-11]考虑了航迹跳变,并做了相应的预测和修正,但只针对单个高重频信号进行了处理.对于多重频参差工作模式,不能有效利用多重频信号的相关性进行目标能量的积累.文献[12]提出了一种基于粒子滤波的高重频TBD检测算法,文献[10-12]中的方法都需要利用目标的初始化状态信息进行后续状态的预测.
针对上述问题,笔者提出了一种高脉冲重复频率(HPRF)雷达距离延拓检测前跟踪方法.该方法列出量测数据所对应的全部可能的距离以进行距离延拓,消除目标的距离模糊,然后进行多重频组内对应单元的能量直接累加,再通过组间航迹能量积累使目标在真实距离上获得最大的能量.与常规余差查表法和一维集算法相比较,该方法省去解距离模糊算法中的查表、均值和方差等精确运算,利用目标在真实距离上航迹能量最大,在航迹能量积累后实现目标真实航迹的检测.与文献[10]比较,该方法在未知目标初始化状态的情况下,通过多重频组内和组间双重能量积累,改善了航迹能量扩散效应,提高了弱小目标的检测性能.
1 系统模型
1.1 目标状态方程
设k时刻,目标的状态向量为

相应的状态方程为

其中,wk为目标加速度增量,是服从均值为0、方差为Q的高斯噪声,TR为采样间隔.
1.2 量测方程
设第p个重频回波信号的测量值为

其中,i和j分别为距离单元和多普勒单元;p={1,2,3},为重频编号;S={1,…,Nr,p}×{1,…,Nd},Nr,p和Nd分别为第p个重频的距离和多普勒单元数.zk,p的具体形式为


在点(i,j)目标不存在,则符合瑞利分布,其似然函数为

为了计算方便,定义似然比函数如下:

由于各分辨单元的量测值zk是相互独立的,且目标的影响主要集中在目标所在单元,及其周围几个单元上.所以整个数据平面对应的似然函数为

其中,Sm代表目标影响的单元集合.
2 HPRF雷达距离延拓TBD检测算法
HPRF雷达距离延拓TBD检测算法分为6个步骤,如图1所示.首先对动目标检测(MTD)后的数据进行预处理[13],将低于门限的置零,以减少数据存储量和计算量.其次通过距离延拓、多重频组内积累实现距离解模糊和目标能量直接积累,通过组间DP-TBD检测算法获得目标的航迹能量积累.最后,消除由动态规划算法引起的航迹团聚效应,去除由于低信噪比引起的虚假目标航迹.
2.1 积累值函数
定义zk=(zk,1,zk,2,zk,3),则HPRF雷达DP-TBD算法的积累值函数为

对于三重频工作模式,在多重频组内目标的距离移动不超过一个距离分辨单元,状态xk+1不发生变化.
其测量值可以认为是对同一目标信号的三次连续独立采样,则有


2.2 距离延拓和多重频组内能量
设各重频对应的最大不模糊距离分别Ru,1,Ru,2,Ru,3,雷达最大探测距离为Rmax.距离延拓方法如下:
(1)选取第一个重频,对超过预处理门限γ1的量测数据进行距离延拓.在多普勒单元数上保持不变,在距离单元数上扩展生成积累数据Ck,则

其中,Sy={1,…,(M1+1)Nr,1}×{1,…,Nd},M1=int(RmaxRu,1),为该重频下最大的距离模糊数.

其中,n=i+m1Nr,1,m1∈{0,1,…,M1}.
对于单目标数据,设距离模糊数m1=时为真实目标距离,则m1≠时的为虚假目标数据.当Ck为稀疏矩阵时,可采用十字链表方式压缩存储以节省数据存储空间.

将量测数据zk进行距离延拓,并积累后,数据Ck不存在距离模糊.在无距离遮挡的情况下,目标数据在距离延拓后,换算到真实距离上时,其组内能量积累是3个重频目标能量之和.而不同重频生成的虚假目标不可能换算到同一距离单元,其组内能量积累是虚假目标能量和噪声信号能量之和.实现了目标数据在真实距离上能量的非相干积累,而且这种积累不存在能量扩散效应,利于相邻目标的检测.如果在某个重频上存在距离遮挡,其他两个重频的能量也能得到积累.

图1 HPRF雷达信号处理流程示意图
2.3 组间DP-TBD算法步骤
假设积累K组多重频数据,具体的算法步骤如下:

其中,Ψk(xk)用于存储各组数据之间的状态转移关系,Sn代表目标影响的单元集合.
步骤2 循环递推,当2≤k≤K时,对于目标在第k帧的所有可能的状态,

其中,τ(xk)表示目标状态在组间可能转移的状态范围.
步骤3 目标检测,定义门限γ2,如果超过门限,则认为检测到目标,否则认为没有检测到目标.


步骤5 航迹凝聚,利用航迹扩散的轨迹与目标真实轨迹临近的特点,滤除目标轨迹旁边的扩散航迹.
2.4 去除虚假目标
在低信噪比情况下解距离模糊,因虚警率上升会产生虚假目标.虚假目标的能量为目标能量和噪声能量之和,其能量要低于真实目标的能量,但经过航迹能量积累可能会超过检测门限.虚假目标与真实目标在航迹、距离和速度上存在相关性,依据此特点去除虚假目标航迹信息.假设目标作匀速直线运动,其运动轨迹为r(k),虚假目标的运动轨迹为rf(k),经过距离延拓后虚假目标的速度不变,显然两者的运动轨迹平行.两者的关系可表示为

其中,mp为目标在第p个重频的距离模糊数,εr,εd分别是距离和多普勒速度容许误差.
3 仿真结果与分析
仿真实验主要参数如表1所示.

表1 仿真实验参数
假设目标径向速度v=500 m/s,目标初始位置r0=30 km.假定加速度噪声方差Q=(1 m/s2)2.3个重频的脉冲的重复周期PRI分别为80μs、120μs和140μs,其最大不模糊距离分别为12 km、18 km和21 km.蒙特卡罗次数为100.
仿真实验1弱小目标的检测和航迹回溯.
设积累的多重频组数K=8,图2为目标航迹能量积累(输入信噪比(SNR)为7 d B).可以看出,目标在真实距离26.5 km处的能量突出,提高了对弱小目标的检测性能.同时,在真实目标附近出现了3个虚假目标,其能量不到真实目标能量的1/3.图3为对4个目标信号进行航迹回溯,3个虚假目标的航迹与真实目标的航迹处于平行关系,且航迹分别相差±12 km和18 km,为重频PRF1和PRF2最大不模糊距离的整数倍.通过选取能量最大的为目标航迹,再依据虚假目标与真实目标的相关性,可去除3个虚假目标.
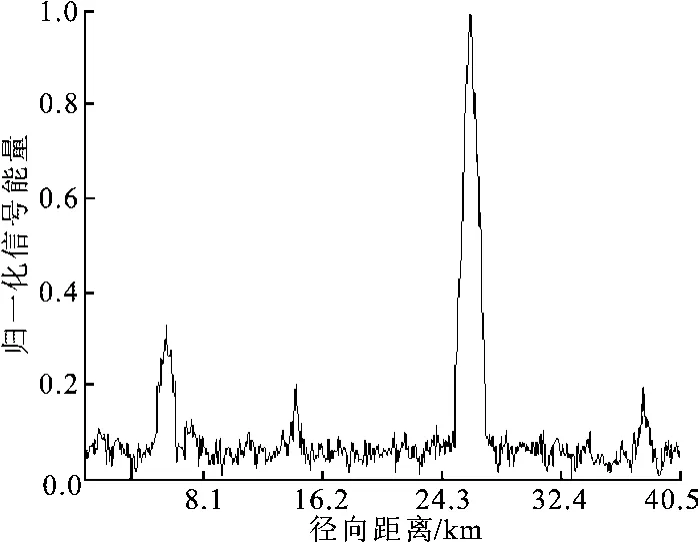
图2 目标航迹能量积累
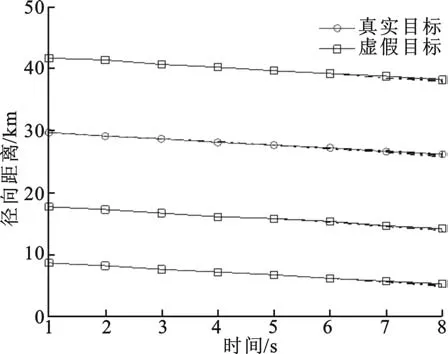
图3 目标航迹回溯
仿真实验2与传统解模糊算法的性能比较.
图4为文中距离延拓方法和传统余差查表法解模糊后进行DP-TBD算法的性能对比.由图4可以看出,当检测概率为50%时,文中算法比传统算法的性能高0.5dB,在信噪比大于8 d B时,二者的检测概率相同.这是因为在低信噪比情况下,个别重频的目标信号能量低于预处理门限值,用余差查表法解模糊的正确率下降,使得检测概率下降;而文中方法则不同,只会影响到组内目标能量的大小,其他重频的能量仍能获得积累.图5为目标距离单元的平均均方根误差(RMSE)曲线图,RMSE定义为

可以看出,在低于8 d B的情况下,文中方法的精度有了较大的提高.这也是因为在低信噪比情况下,常规方法解模糊正确率和精度的下降所造成的.

图4 检测概率
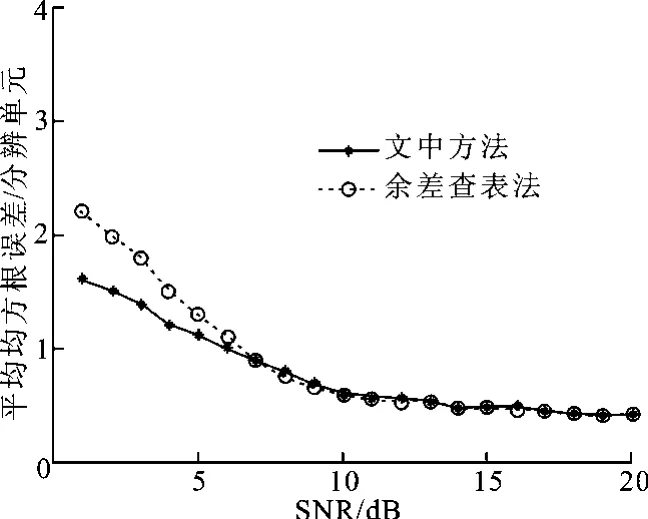
图5 距离均方根误差
仿真实验3在已知目标初始化状态信息的前提下,与文献[10]方法的检测性能对比.
文献[10]的方法采用单一高重频工作模式,其脉冲的重复周期为140μs,最大不模糊距离为21 km,航迹积累的数据帧数为9帧,文中方法航迹积累3组3重频数据(K=3),也积累9帧数据.

图6 能量扩散效应对比(SNR=5dB)

图7 检测概率
图6为两种方法航迹能量积累扩散效应对比.可以看出,文中方法的团聚效应影响单元数明显比文献[10]中的方法减小了一半以上.因为文献[10]方法执行了9次DP-TBD航迹积累,其能量扩散影响到左右9个单元.而文中方法执行了3次组内直接能量积累和3次组间DP-TBD航迹积累,虽然也积累9帧数据,但因为组内积累不存在能量扩散效应,所以其航迹能量只扩散到左右3个单元,有利于相邻目标的检测.
图7为检测概率性能的对比.可以看出,文中方法的检测性能优于文献[10]中的方法,文中方法的检测性能比文献[10]中方法的高出1 d B,这是因为文中方法的多重频组内积累避免了能量扩散,使目标能量更加集中,提高了目标的检测概率.
4 结束语
针对HPRF雷达弱小目标检测前跟踪的距离模糊问题,笔者提出了一种HPRF雷达距离延拓检测前跟踪方法.仿真结果表明,文中方法在未知目标初始化状态信息的情况下,提高了弱小目标的检测性能,改善了航迹能量积累的扩散效应.
[1]Davey S,Rutten M,Cheung B.A Comparison of Detection Performance for Several Track-before-detect Algorithms[J]. EURASIP Journal on Advances in Signal Processing,2008,2008(1):1-10.
[2]Grossi E,Lops M,Venturino L.A Heuristic Algorithm for Track-before-detect with Thresholded Observations in Radar Systems[J].IEEE Signal Processing Letters,2013,20(8):811-814.
[3]Buzzi S,Lops M,Ferri M.Track-before-detect Procedures in a Multi-target Environment[J].IEEE Transactions on Aerospace and Electronic Systems,2008,44(3):1135-1148.
[4]Deng X,Pi Y,Morelande M,et al.Track-before-detect Procedures for Low Pulse Repetition Frequency Surveillance Radars[J].IET Radar,Sonar and Navigation,2011,5(1):65-73.
[5]Yi W,Morelande M,Kong L,et al.An Efficient Multi-frame Track-before-detect Algorithm for Multi-target Tracking [J].IEEE Transactions on Signal Processing,2013,7(3):421-434.
[6]Lu Jin,Shui Penglang,Su Hongtao.Track-before-detect Method Based on Cost-reference Particle Filter in Non-linear Dynamic Systems with Unknown Statistics[J].IET Signal Processing,2014,8(1):85-94.
[7]吴兆平,朱凯然,苏涛,等.采用改进粒子滤波的雷达扩展目标检测前跟踪[J].西安电子科技大学学报,2011,38(2): 99-104.
Wu Zhaoping,Zhu Kairan,Su Tao,et al.Extended Radar Target Tracking before Detection Using the Modified Filter [J].Journal of Xidian University,2011,38(2):99-104.
[8]夏双志,严俊坤,刘宏伟,等.目标存在状态变量的非齐次马尔可夫链模型[J].西安电子科技大学学报,2013,40(4): 48-55.
Xia Shuangzhi,Yan Junkun,Liu Hongwei,et al.Heterogeneous Markov Chain Model of the Target Existence Variable for Bayesian Track-before-detect[J].Journal of Xidian University,2013,40(4):48-55.
[9]David J,Jr Kramer R,Reid W S.Track-before-detect Processing for a Range-ambiguous Radar[C]//1993 IEEE National Radar Conference.Piscataway:IEEE,1993:113-116.
[10]张伟,孔令讲,杨晓波,等.一种用于HPRF雷达的改进DPA弱目标检测算法[J].现代雷达,2011,33(5):21-25.
Zhang Wei,Kong Lingjiang,Yang Xiaobo,et al.An Improved Dynamic Programming Algorithm of Weak Target Detection for HPRF Radar[J].Modern Radar,2011,33(5):21-25.
[11]Yang Chunyin,Kong Lingjiang,Yang Xiaobo.A Modified DPA for Weak Target Detection via HPRF Radar[C]// Proceedings of 2011 IEEE CIE International Conference on Radar.Piscataway:IEEE,2011:1737-1740.
[12]Bocquel M,Driessen H,Bagchi A.Multitarget Particle Filter Addressing Ambiguous Radar Data in TBD[C]// Proceedings of 2012 IEEE Radar Conference.Piscataway:IEEE,2012:575-580.
[13]Grossi E,Lops M,Venturino L.A Novel Dynamic Programming Algorithm for Track-before-detect in Radar Systems [J].IEEE Transactions on Signal Processing,2013,61(10):2608-2619.
(编辑:李恩科)
Tracking-before-detection method based on range extension for HPRF radars
ZHANG Peng,ZHANG Linrang,HU Zijun
(National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
Aiming at the issue of range ambiguity,a novel tracking-before-detection(TBD)method based on range extension is proposed for dim target detection with high pulse repetition frequency(HPRF) radars.The proposed method functioning in a staggering multiple pulse repetition frequencies(PRFs)mode preprocesses the MTD-processed data and performs range-extension according to different range ambiguous numbers.The maximum energy of targets is then acquired through the accumulation of energy inside the group of multiple PRFs and of tracking energy between groups.Finally,the track diffusion effect incurred by the dynamic programming algorithm is eliminated using the tracking cohesion strategy,and the tracking of fake targets caused by a low signal to noise ratio is reduced according to the correlation between fake and real targets.The new method improves the detection performance of the dim target without a priori knowledge of the state of the target.Simulation illustrates the effectiveness of the proposed method.
high pulse repetition frequency;range extension;range ambiguity;state estimation;dynamic programming;tracking-before-detecttion
TN957
A
1001-2400(2014)05-0207-06
2014-04-10
国家自然科学基金资助项目(61301281,61301285)
张 鹏(1974-),男,西安电子科技大学博士研究生,E-mail:zhphsearch@163.com.
10.3969/j.issn.1001-2400.2014.05.035
猜你喜欢
青年歌声(2019年12期)2019-12-17
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(2018年34期)2018-12-18
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
山东青年(2016年3期)2016-02-28
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
母子健康(2015年1期)2015-02-28