参数激励下带横向振动不稳定特性实测与计算
2014-07-27 07:01曾祥坤喻菲菲王小莉
噪声与振动控制 2014年6期
曾祥坤,喻菲菲,王小莉
(1.广东技术师范学院 机电学院,广州510665;2.华南理工大学 机械与汽车工程学院,广州510641)
参数激励下带横向振动不稳定特性实测与计算
曾祥坤1,喻菲菲1,王小莉2
(1.广东技术师范学院 机电学院,广州510665;2.华南理工大学 机械与汽车工程学院,广州510641)
以发动机前端附件驱动系统中两相邻轮带段为研究对象,将带简化成轴向运动的粘弹性弦线,建立轴向运动弦线在张力和带速的参数激励下的非线性动力学方程;采用Galerkin方法将非线性运动偏微分方程离散为一组常微分方程,并用摄动法计算引起带横向振动不稳定特性的主/次谐共振频率范围。介绍发动机前端附件驱动系统中轮的角速度和带横向振动的实验装置和测试方法,识别出引起带横向振动不稳定特性的参数激励频率范围,带横向振动不稳定特性的共振频率范围计算值与实验值具有较好的一致性。实验结果表明带参数激励下横向振动的不稳定特性主要发生在带的次谐共振频率范围内;带段伸缩张力幅值越大,带在参数激励下横向振动的主/次谐共振频率范围就越大。
振动与波;多楔带;参数激励;共振频率;实测分析
带的横向振动是汽车发动机前端附件驱动(FEAD)系统的主要动态特性之一[1,2]。在带的伸缩张力和带速的参数激励下,带的横向振动会表现出较强的不稳定特性[3—6],即带的横向振动位移较大。带的横向振动位移过大,会产生较大的噪声并缩短皮带使用寿命。为此,带横向振动在参数激励下的不稳定特性已成为学者们重要的研究内容[7—9]。
在带张力波动的激励下,Mockenstrum等人[7]建立了轴向运动弦线运动方程;推导出皮带横向振动主谐共振频率范围的解析表达式。Pakdemirli等人[8]研究了在带速波动的激励下,轴向加速运动弦线横向振动的稳定边界条件。以上两文献均基于单频率成分的参数激励,而在汽发动机FEAD系统中,带的参数激励频率受发动机点火频率以及各带轮负载扭矩力的影响,皮带的张力波动以及带速的波动均是多频率成分。Parker等人[9]在文献[7、8]的研究基础上,将皮带看成轴向运动弦/梁模型,基于计算模型研究在多频率成分带伸缩张力和带速激励下,皮带横向振动的不稳定特性。
采用Galerkin离散方法,将轴向运动弦线方程转化为在参数激励(带的张力波动和带的稳态速度)下的非线性动力学方程;采用摄动法得到带横向振动的主/次谐共振频率的计算模型。介绍了FEAD系统动特性的实验装置、带轮角速度和带段横向位移的测试方法;以FEAD系统中最紧边带段为测试对象,识别出引起带横向振动不稳定特性的参数激励主/次谐共振频率范围。
1 数学模型
1.1 轴向运动弦线模型
FEAD系统中,两旋转中心位置固定的轮之间轴向运动弦线的运动方程[10]

其中ρA为带的线密度;V为带的横向位移;角下标‘T’、‘X’分别表示对时间和带纵向位置的偏导;c为带的速度;Ps为带的静态张力;Pd为动态张力

其中EA为带的纵向刚度;L为带段长度;U(L,T)、U(0,T)分别为带段L两端点的纵向位移。为简化计算模型,对式(2)中相关参数进行无量纲转化

方程(1)的无量纲化后的方程为

其中带的张力波动为

带速的波动为

相对于带纵向伸缩引起带的张力波动,可以忽略带横向位移即方程(4)中积分项对带张力的影响。将式(5)和(6)带入方程(4)中,并假设带的轴向运动速度为常数γ0,得到轴向运动弦线无量纲运动方程为

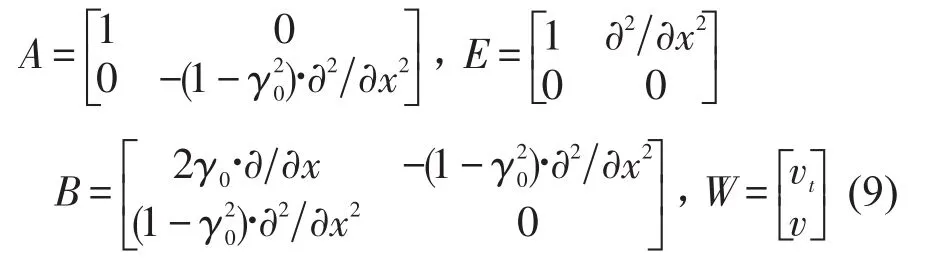
将方程(7)写成状态方程的形式

其中
1.2 带的主/次谐共振频率的计算模型
采用Galerkin离散的方法,设方程(8)中带的横向振动响应的表达式为

其中Φn为特性向量。在轴向运动弦线模型中,非参数激励下基于Galerkin法得到的特性向量Φn的表达式[11]

其中

将式(12)带入方程(8)中,得到


带横向振动位移随时间的变化,以及固有频率用摄动法展开,即

将式(14)带入方程(13)中,得到

其中,

式(15)的周期解为

将式(18)带入式(16)中,得到
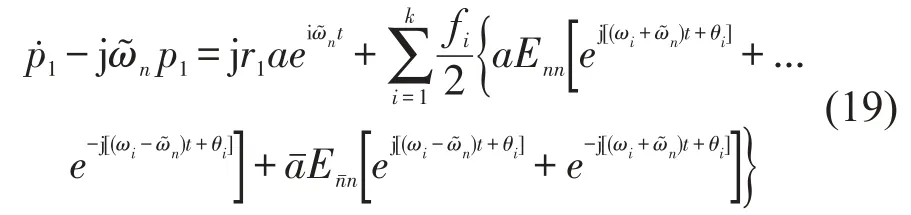
式(19)中唯一的久期项是jr1aeiω˜nt。当激励频率接近2ωn时,又出现了其它的久期项,系统的周期响应解要求消去久期项,则有

由式(20)得到

将式(21)代入式(17)中,得到参数激励下带的主谐共振频率范围计算式

由式(10)、式(11)和式(13)得到

由式(19)可见,jr1aeiω˜nt中的r1为零,且任意激励频率ωl接近ωn时,式(19)将会出现久期项。消除式(22)中的久期项,得到参数激励下带主谐共振频率范围为
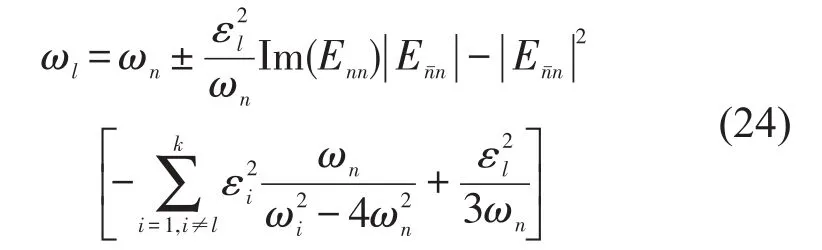
由式(22)和式(23)可见,带的参数不稳定激励频率与带段张力波动的相位无关。参数激励的频率若是带的某1阶固有频率的两倍将会引起带的主谐共振,若与带的某1阶固有频率相等将会引起带的次谐共振。这两种参数激励频率下,都会引起带在参数激励下的不稳定特性。
2 实验部分
2.1 实验装置
测试对象为直列四缸1.8 t发动机FEAD系统。该系统由多楔带连接曲轴(CS)、空调压缩机(AC)、惰轮1(IDL1)、交流电机(ALT)、动力转向泵(PS)、惰轮2(IDL2)、水泵(WP)和张紧器(TEN)共8个带轮组成。多楔带的型号为6PK型。采用德国Rotec数采系统采集信号和分析数据。FEAD系统实物图和传感器连接示意图分别见图1和图2[12]。
角度编码器3.6°等角度采样,用于测量CS、AC的角速度。激光位移传感器采样频率为12.5 kHz,用于测量最紧边或最长边带段中点的横向位移。激光位移传感器应垂直于皮带布置,且距离皮带的有效测量距离为15 mm~30 mm。

图1 FEAD系统测试现场
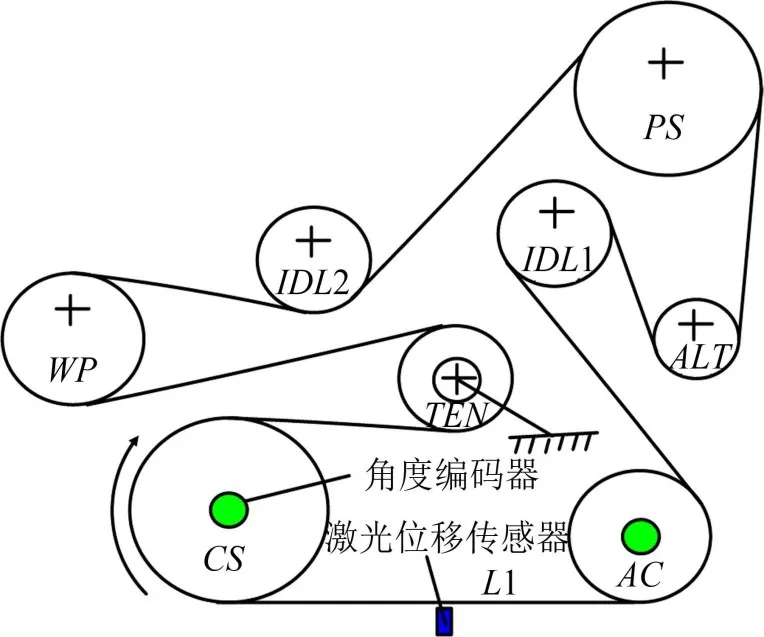
图2 FEAD系统传感器的布置示意图
测试前,应启动发动机试运行几分钟,以确保测试过程中皮带的参数特性基本一致。停机后,用皮带张力计测定带段L1的静态张力,取三次测试张力的平均值。发动机转速从1 000 r/min匀加速到5 500 r/min(约30 s),作为FEAD系统的动态测试工况。
2.2 数据处理
假设带与轮之间不打滑;带以准静态方式伸缩;忽略各轮包角处带蠕变的影响。角度编码器对信号是等角度采样,经Rotec分析软件得到带轮角位移和角速度并不是等时间间隔的数据。可采用线性差分法将各带轮角位移或角速度换算成等时间间隔的数据[13]。角位移等时间间隔重采样原理见图3(角速度重采样原理与之类似)。
设θ1(t)、θ2(t)分别是CS和AC等时间间隔点处的角位移(单位:rad),θ˙1(t)、θ˙2(t)分别是CS和AC等时间间隔点处的角速度(单位:rad/s)。带段L1的伸缩长度为

带段L1的纵向速度为


图3 角位移等时间间隔重采样示意图
3 结果分析
用张力计测定带段L1的静态张力为550 N。由式wn=nπ(1-)计算得到无量纲化后带的一阶固有频率ω1为2.67 rad(约140 Hz)。考虑到本实验对象为一台4缸发动机,二阶为曲轴带轮旋转运动的主阶次,选取曲轴转速为4 200 r/min时作为研究工况。
实验得到带段L1中点横向振动位移随曲轴转速变化关系见图4,其横向振动位移瀑布图见图5。
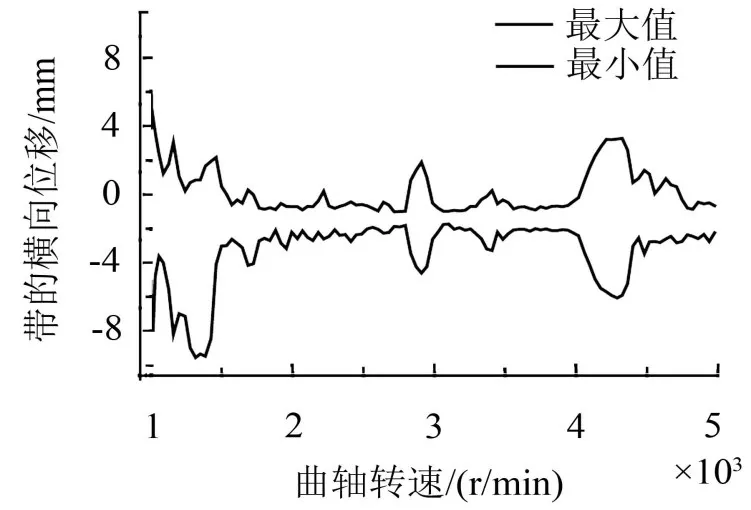
图4 带段L1中点的横向振动位移随转速的变化关系
由图4可见,曲轴转速在1 000 r/min~1 500 r/ min范围内,皮带的横向振动位移较大,这主要是由于激励幅值较大所引起的。随着转速的增加,带段L1中点的横向振动位移在4 200 r/min附近出现了较大值,位移幅值达到6 mm。结合图5看出,在4 200 r/min附近,带段L1中点的横向振动不稳定的参数激励频率范围为130 Hz~160 Hz。
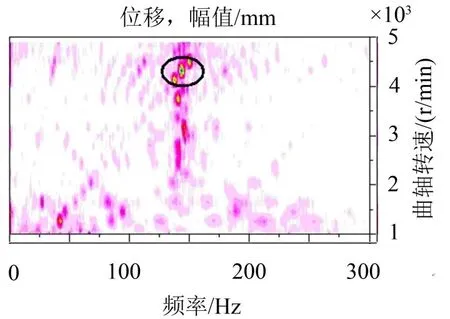
图5 带横向振动位移的瀑布图
发动机转速在4 200 r/min时,由式(25)计算出带段L1伸缩长度主要的阶次项的幅值和频率,忽略伸缩长度幅值较小的其它阶次项影响。由于带纵向速度的波动相对于张力波动对带的横向振动影响较小,可忽略带速波动的影响,假设带速为一常数c0(由曲轴转速和曲轴带轮半径确定)。带参数激励下的共振频率计算模型中的相关参数见表1、表2和表3。
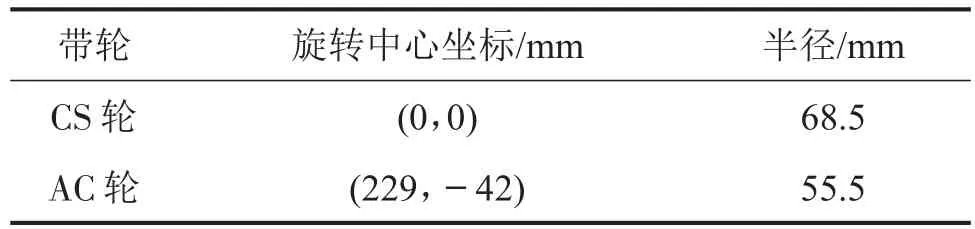
表1 轮的相关参数

表2 多楔带的相关参数
表3 实验得到的相关参数
由计算模型得到带横向振动不稳定的参数激励频率随带段张力幅值变化的关系曲线见图6。其中‘∗’是对应发动机转速为4 200 r/min时,实验得到带在参数激励下无量纲化的共振频率范围。
由图6可见,带的主谐共振频率范围要明显比次谐共振频率范围大;张力波动幅值越大,带的主/次谐共振频率范围也越大。4 200 r/min时,实验得到带在参数激励下的共振频率范围(图6中‘∗’)刚好在次谐共振频率范围内,且共振频率范围的计算值与实验值基本一致。由于FEAD系统中,带张力波动的频率值一般小于带一阶固有频率的两倍,因此,带的不稳定参数激励一般不会引起带的主谐共振。
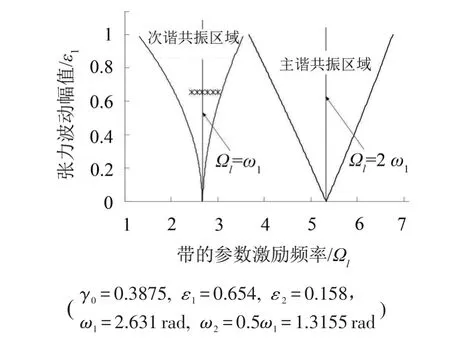
图6 参数激励下带的主、次谐共振频率范围
4 结语
文中采用Galerkin离散方法和摄动法,建立了参数激励下,带横向振动不稳定特性的主/次谐共振频率的计算模型。实验识别出了在张力波动和带速的参数激励下,带横向振动的不稳定特性以及参数激励下共振频率范围。得到以下相关结论:
(1)对于轴向运动的带,在参数激励频率为带的某一阶固有频率两倍和一倍时,将分别出现带横向振动的主谐共振和次谐共振现象。主谐共振频率范围要比次谐共振频率范围大;
(2)汽车前端附件驱动(FEAD)系统中,带在参数激励下的横向振动不稳定特性容易发生在曲轴转速较高的时候,而且主要出现在次谐共振频率范围内;
(3)实验验证了带在参数激励下的横向振动不稳定特性的次谐共振频率的计算模型。该计算模型为FEAD系统的前期设计,包括带轮位置布置、带段的静态张力等设计提供参考。
[1]Wen-Bin Shangguan,Xiang-kun Zeng.Experimental and calculation analysis of rotational vibration responses for an engine front end accessory drive system∶Part I Experiments and measurement results[J].ASME Journal of Vibration andAcoustics,2013,135(3)∶031002,1-14.
[2]上官文斌,王红云,张智.多楔带传动系统振动建模及带段横向振动控制的研究[J].振动工程学报,2009,22(3):250-255.
[3]Rhodes J.E.Jr.Parametric self-excitation of a belt into transverse vibration[J].Journal of Applied Mechanics, 1970,37(1)∶1055-1060.
[4]Ulsoy A.G.,Whitesell J.E.,Hooven M.D.Design of belttensioner systems for dynamic stability[J].Journal of Vibration andAcoustics,1985,107(4)∶282-290.
[5]周明刚,陈源,黄涛,周敬东.动力学系统的稳定性与非线性行为的一种分析计算方法[J].噪声与振动控制,2010,30(4):22-24.
[6]严巧赟,丁虎,陈立群.黏弹性轴向运动变张力梁非线性动力学[J].噪声与振动控制,2013,33(3):16-20.
[7]Mockensturm E.M.,Perkins N.C.and Ulsoy A.G.Stability and limit cycles of parametrically excited,axially moving strings[J].Journal of Applied Mechanics,1996, 118(1)∶346-351.
[8]Pakdemirli M.and Ulsoy A.G.Stability analysis of an axially accelerating string[J].Journal of Sound and Vibration,1997,203(5)∶815-832.
[9]Parker R.,Lin Y.Parametric instability of axially moving media subjected to multifrequency tension and speed fluctuation[J].Journal of Applied Mechanics,2001,68 (1)∶49-57.
[10]Thurman A.L.and Mote C.D.Jr.Free periodic nonlinear oscillation of an axially moving string[J].Journal ofApplied Mechanics,1969,36(1)∶83-91.
[11]Jha R.,Parker R.Spatial discretization of axially moving media vibration problems[J].Journal of Vibration and Acoustics,2000,122(1)∶290-294.
[12]曾祥坤,上官文斌,侯之超.发动机前端附件驱动系统旋转振动实测与计算方法的研究[J].内燃机学报,2011,29(4):355-363.
[13]Michon G.,Manin L.,et al.Parametric instability of an axiallymovingbeltsubjectedtomultifrequency excitations∶experiments and analytical validation[J].Journal ofApplied Mechanics,2008,75(1)∶041004.
Measurement and Computation of Instability Performance of Transverse Vibration for Serpentine Belt under Parametric Excitation
ZENG Xiang-kun1,YU Fei-fei1,WANG Xiao-li2
(1.College of Electromechanical Engineering,Guangdong Polytechnic Normal University, Guangzhou 510665,China; 2.School of Mechanical andAutomotive Engineering,South China University of Technology, Guangzhou 510641,China)
∶The serpentine belt between two adjacent pulleys in an engine’s Front End Accessory Drive(FEAD)system is simplified as an axially moving viscoelastic string.Nonlinear dynamical equation is established for investigating the stability of the axially moving string subjected to parametric excitation resulted from tension and translation-speed oscillations.Galerkin method is used to discrete the nonlinear partial differential equations into a group of ordinary differential equations.Perturbation method is used for calculating the primary and secondary instability frequencies of the belt’s transverse vibration.An experiment was carried out for getting the angular velocity of the pulleys and the vibration of the belt in the FEAD system,and the parametric excitation frequencies of the belt’s transverse vibration were identified.The parametric excitation frequencies in the experiment agreed well with those of calculated results.Experiment results show that the instability of belt’s transverse vibration occurs in the regions of belt’s secondary resonant frequencies.When the tensile force of the belt increases,the regions of belt primary and secondary resonant frequencies under the parametric excitation also increase greatly.
∶vibration and wave;serpentine belt;parametric excitation;instability frequencies;measuring analysis
TH132.3;TK423.42< class="emphasis_bold">文献标识码:ADOI编码:
10.3969/j.issn.1006-1335.2014.06.003
国家自然科学基金资助项目(51305085)
曾祥坤(1984-),男,博士,讲师,江西省南康市人,主要从事汽车振动与控制、汽车NVH特性等方向的研究工作。
E-mail∶zxiangkun8422@163.com
1006-1355(2014)06-0012-05
2014-04-28
猜你喜欢
少儿科技(2022年4期)2022-04-14
水泵技术(2021年5期)2021-12-31
马克思主义哲学研究(2021年2期)2021-06-05
新世纪智能(高一语文)(2020年9期)2021-01-04
制造技术与机床(2018年12期)2018-12-23
中华诗词(2018年4期)2018-08-17
北京航空航天大学学报(2017年4期)2017-11-23
振动工程学报(2017年1期)2017-04-21
制造技术与机床(2015年10期)2015-04-09
科技与创新(2014年15期)2014-09-26