基于广义马尔科夫链模型的动柔度预测*
2014-08-22 11:23黄志刚谢锋云
机床与液压 2014年24期
黄志刚,谢锋云
华东交通大学机电学院,南昌 330013
1.Introduction
Dynamic compliance is the ability of machine tool components deformation to resist external force.It reflects the stability of NC machine tool machining process and has a direct effect on machining accuracy.All kinds of uncertainty will be encountered in machining process,such as randomness of machining process,measurement error,numerical error,and the lack of knowledge[1-2].Uncertainty will cause the lower accuracy and reliability.The traditional Markov chain model is a random process with the capability of prediction,and has been used for engineering prediction[3].The probabilistic parameter of Markov chain model has a form of precise parameter.Yet precise value is difficult to solve uncertainty problem[4].
In this paper,aiming at the defects of the traditional Markov model in processing the uncertainty problem,a generalized Markov chain model,based on the generalized interval probability theory[5-6],is proposed to improve the accuracy and reliability of prediction. In generalized Markov chain model,probability and interval are used to capture the uncertainty.A prediction method of generalized Markov chain model is developed.In order to predict dynamic compliance,an experiment of relative excitation is developed.The dynamic compliance calculation model is proposed for calculating prediction historical date.The dynamic compliance in machining process is predicted by the generalized Markov chain model.
2.Dynamic compliance calculation model
In order to obtain the historical data of dynamic compliance,a four-degree-of-freedom dynamic model is employed in Figure 1.
The dynamic equation can be obtained by the analysis of machine-tool-workpiece system as follows:

Where d(t)is the displacement vector,F(t)is the cutting force vector,and M,C,K are denoted as the modal mass,modal damping,and modal stiffness matrices of machine-tool-workpiece system,respectively.
Equation(1)is shown in frequency domain as follows:

Where Q(s)and F(s)are the displacement and force vectors which are obtained by Laplace transform with initial conditions set to zero.
And then,the transfer function matrix can be obtained as follows:

Supposing the milling system is a linear time invariant system and s=jω,Equation(3)becomes

The relative displacement between tool and the workpiece is defined as

WhereΔx andΔy are the relative displacements between tool and workpiece,Gxx(iω)and Gyy(iω)are the relative dynamic compliances, Gxy(iω )and Gyx(iω)are the relative cross dynamic compliances,Fxand Fyare the forces of x axis and y axis respectively[7].
If exciting force is applied on x axial direction only,Equation(5)is modified as

According to equation(5)or(6),the dynamic compliance can be obtained.
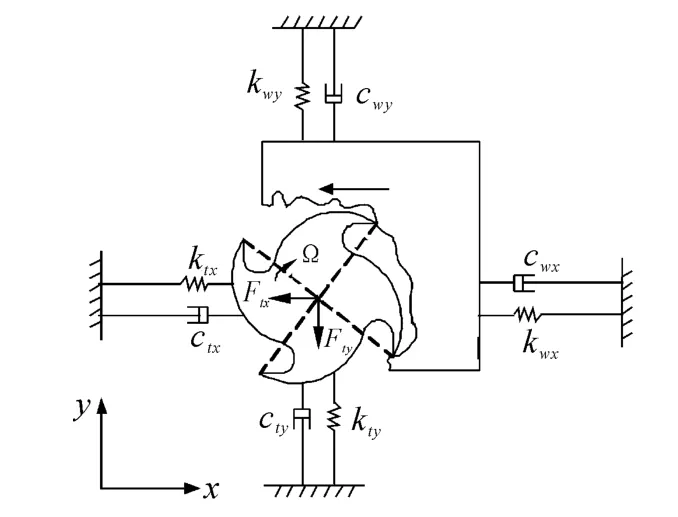
Figure 1.Dynamic compliance dynamic model
3.Generalized Markov chain model
Generalized Markov chain is the generalization of traditional Markov chain in the context of generalized interval probability theory[8].In generalized Markov chain model,all probability parameters in the traditional Markov chain model are replaced by the generalized interval probabilities.In this paper,boldface and italics symbols are used to denote generalized intervals.The parameter uncertainty in the traditional Markov chain model is solved by generalized interval probability parameter.A generalized Markov chain with three states is illustrated in Figure 2.

Figure 2.Generalized Markov chain with three states
It is defined that the values of N possible states are The state variable at time t is denoted as qt,and a generalized Markov chain is defined as p(qt=Sj|qt-1=Si,…,q1=Sk)=p(qt=Sj|qt-1=Si).The state transition probabilities aijare defined as aij=p(qt=Sj|qt-1=Si)(1≤i,j≤N),where aij≥0,is denoted as the state transition matrix.The initial probability distribution π =(πi)is represented asπi=p(q1=Si)(1≤i≤N).A complete specification of a Generalized Markov chain is composed of N,A,andπ[8].
π(0)is defined as the interval probability vector representing the initial distribution.The interval probability distribution of state Siafter n steps is the ith entry in the vector of

The prediction procedure of generalized Markov chain model is as follows:
1)Calculating the initial probability distribution of the generalized Markov chain modelπ(0);
2)Calculating the state transition matrix of the generalized Markov chain model A~;
3)Calculating n step prediction distributionπ(n);
4)Obtaining prediction result according to interval weight and maximum criterion.
4.Dynamic compliance prediction
To predict the dynamic compliance of machining center,an experiment of relative excitation is conducted on the XHK5140 machining centre produced by Huazhong Numerical Control Company.A vibration exciter ESD-045 and an accelerometer PCB 356A16 are both installed on the worktable.The vibration exciter signals are offered by the sweep signal generator KD 5602A.An exciting force is applied on the tool tip.The exciting force and accelerometer signals are obtained by the signal acquisition card NI PXI-1042 for further analyzing.The machine relative excitation experiment is shown in Figure 3.
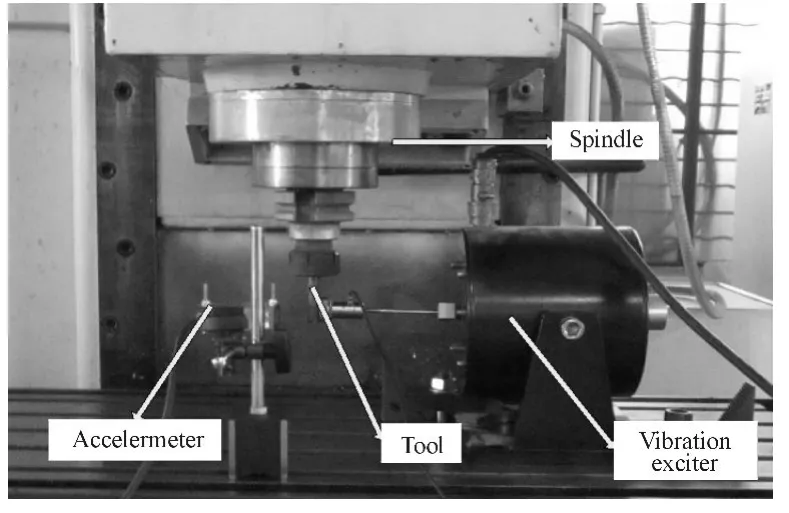
Figure 3.Relative excitation experiment of machine
In this experiment,exciting force is applied on the tool tip along x axial direction by vibration.Exciting force and acceleration signal are data collection system achieved.The same relative excitation experiment scheme is performed in the continuous six months,in which an experiment is performed in every month.The six months dynamic compliance data can be obtained by dynamic compliance calculation model.The interpolation method is used based on the six data,and the nine precise dynamic compliances are achieved.Yet in fact,the dynamic compliance may not be a precise value if the uncertainty factors are considered.In this paper,the dynamic compliance is transformed into the form of generalized interval by considering general error±1%.
According to the Lloyd algorithm [9],the dynamic compliance is divided into three interval[2.630 5,2.650 5),[2.650 5,2.670 5)and[2.670 5,2.690 5].The three intervals are encoded as 1,2 and 3,and the midpoints of three intervals are 2.640 5,2.660 5 and 2.680 5,respectively.The precise and interval form of dynamic compliance and code are shown in table 1,where the unit of dynamic compliance is 10-8m/N.
The first six dynamic compliances are regarded as the prior data;the latter three dynamic compliances are to be predicted.According to the prediction procedure of the generalized Markov chain,the prediction results of dynamic compliances are shown in Table 2.
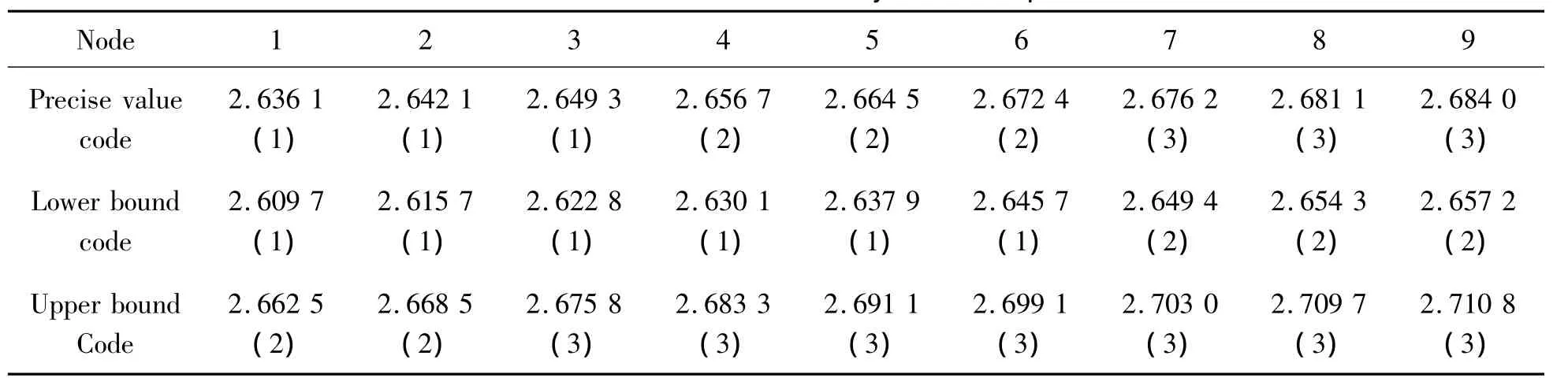
Table 1.Precise and interval of dynamic compliance

Table 2.Precise and interval value of dynamic compliance prediction
In Table 2,it can be seen that the generalized Markov chain prediction value is a form of generalized interval,and the actual value is contained in the generalized interval value.The generalized interval prediction result can improve the prediction reliability by more information provided with the interval values.For example,the prediction result with respect to the seventh data node is an interval value [2.666 7,2.682 9].It indicates that the actual value is all possible in this interval range.This provides the guarantee for the reliability of the decision.In contrast,the traditional Markov chain model does not provide such information.Furthermore,the prediction error of the traditional Markov chain model is more obvious compared to the actual values.The prediction accuracy is calculated in terms of root mean square error(RMSE).The RMSE calculation result of the generalized Markov chain prediction model is 0.001 6,yet the RMSE calculation result of the traditional Markov chain prediction model is 0.007 9.The generalized Markov chain model has higher prediction accuracy than that of the traditional Markov chain model.
5.Conclusion
Dynamic compliance has important influence on machining stability and accuracy.A generalized Markov chain model is proposed to solve the defects of the traditional Markov model in processing the prediction uncertainty.The prediction method of the generalized Markov chain model is developed.An experiment of relative excitation is set up for acquiring dynamic compliance historical data.The dynamic compliance is predicted by the generalized Markov chain prediction model.The results show that the generalized Markov chain prediction model has better prediction performance than that of the Markov chain.
[1] XIE F Y,Hu YM,Wu B.A generalized interval probability-based optimization method for training generalized hidden Markov model[J].Signal Processing,2014,94(1):319-329.
[2] Vallejo A J,Morales-Menéndez R,et al.Pattern Recognition Approaches for Diagnosis of Cutting Tool Wear Condition[J].Transactions of the North American Manufacturing of Research Institution of SME,2007,35:81-88.
[3] Li ST,Cheng Y C.A stochastic HMM-based forecasting model for fuzzy time series[J].IEEE TSyst Man Cy B,2010,40(5):1255-1266.
[4] Möller B,Reuter U.Uncertainly forecasting in engineering[M].Berlin Heidelberg:Springer-Verlag,2007:1-8.
[5] Wang Y.Imprecise probabilities based on generalized intervals for system reliability assessment[J].International Journal of Reliability& Safety,2010(4):319-342.
[6] Hu Y M,Xie F Y,et al.An Optimization Method for Training Generalized Hidden Markov Model based on Generalized Jensen Inequality.ICINCO 1,Roman:Sci Te Press,2012:268-274.
[7] Wang E H,Wu B,et al.Dynamic stiffness deterioration research of a machining center based on the relative excitation method[J].Chinese Journal of Mechanical Engineering,2013,26(5):974-981.
[8] XIE Fengyun,HU Youmin,et al.A generalized Markov chain model based on generalized interval probability[J].Science China Technological Sciences,2013,56(9):2132-2136.
[9] Sabin M J,Gray R M.Global convergence and empirical consistency of the generalized Lloyd algorithm[J].IEEE Transactions on Information Theory,1986,32(2):148-155.
猜你喜欢
加油站服务指南(2022年6期)2022-07-28
心声歌刊(2022年3期)2022-06-06
心声歌刊(2022年3期)2022-06-06
华人时刊(2022年21期)2022-02-15
有色金属(矿山部分)(2021年4期)2021-08-30
资源导刊(信息化测绘)(2020年5期)2020-06-22
中国公路(2017年8期)2017-07-21
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10
蚕桑通报(2015年2期)2015-12-15
中学历史教学(2015年7期)2015-11-11