测量机器人隧道施工自动变形监测的实现
2014-09-05 08:41郑继强朱坤奠
隧道建设(中英文) 2014年1期
范 本,郑继强,朱坤奠
(1.四川建筑职业技术学院测绘工程系,四川 德阳 618000;2.四川建筑职业技术学院土木工程系,四川 德阳 618000;3.成都云隆科技有限公司,四川 成都 610045)
测量机器人隧道施工自动变形监测的实现
范 本1,郑继强2,朱坤奠3
(1.四川建筑职业技术学院测绘工程系,四川 德阳 618000;2.四川建筑职业技术学院土木工程系,四川 德阳 618000;3.成都云隆科技有限公司,四川 成都 610045)
使用传统测量仪器对隧道施工过程中隧道结构体进行变形监测时,数据采集、数据处理和预报过程相互独立,很难及时反映隧道自身安全。为了解决这一问题,基于测量机器人的隧道自动变形监测进行了研究与实现,介绍了以测量机器人为变形监测仪器,通过光纤和网络技术,使用VB编程语言和GeoCOM接口技术,采用SQL Sever数据库,实现远程控制测量机器人进行监测数据的自动采集和存储,并由计算机自动进行数据分析处理、自动预警和报警,从而达到自动监测隧道变形的目的,为隧道施工提供安全保障。从整个系统的硬件组成、软件构成及设计开发、成果处理及输出等方面,分别进行了论述。提出的隧道施工自动变形监测思路和方法,对隧道信息化施工中自动变形监测具有积极的参考意义。
测量机器人;隧道施工;自动变形监测
0 引言
隧道在建设过程中会发生沉降、偏移等变形,对于变形严重或变形监测要求高的地段,如不进行自动的、实时的变形监测,则很难及时发现险情。目前,国内隧道变形监测主要以测量机器人为仪器实现自动化,控制机器人所使用的软件主要有在线控制软件GeoMoS[1]、ADMS[2]和机载软件[3]。这些软件并不是专门针对隧道监测开发的,不能体现隧道监测的特点。
本文以测量机器人为监测设备,根据隧道施工过程中监测点布设要求及监测特点,使用网络技术远程控制机器人,实现监测数据的自动处理、数据报表和手机短信预警等功能,完成了隧道变形监测各过程一体化操作工作。使基于测量机器人的自动变形监测技术成为保障隧道建设安全的重要措施。
1 功能需求分析
隧道建设过程中工作量巨大,各道工序交织进行,工作环境恶劣,地质条件复杂,需要对初期支护和二次衬砌后的隧道体的形变进行连续的监测。变形监测必须要快速、准确地完成测量数据的采集和处理,隧道内光线差、烟雾大、灰尘多等因素对变形监测工作也有一定影响。据此分析,隧道建设中自动变形监测应该满足以下几点要求[4]:
1)自动化。对系统进行一些设置和给定监测计划后,仪器能够进行全自动观测,并对数据进行自动储存。
2)智能化。实现自动变形监测,系统必须具有一定的适应复杂环境和处理问题的能力。
3)远程控制监测数据的采集,并实时传输。隧道内环境差,对监测者身体健康有一定影响,同时隧道施工监测也有一定的危险性,因此要实现机器人的远程控制。
4)数据处理。对采集到的原始数据按照设定的数据处理模型进行后处理,去除测量过程中引入的误差,得到最符合实际变形的数据。
5)数据存储和管理。对自动采集的大量原始观测数据进行存储和管理,并能够对数据进行查询和分析。
6)多样格式的成果输出。成果多格式自动报表输出,便于存档和向有关部门提交资料。
7)自动实时预警、报警。根据设定的限差实时预警、报警,能通过短信等形式发出预警信息。
2 监测系统构成
2.1 硬件系统
采用徕卡TM30测量机器人作为测量仪器。该仪器具有测量精度高、测量速度快、仪器稳定可靠等特点,能胜任隧道内全天候无间断的工作。
2.2 软件系统
根据隧道建设过程中施工及变形监测特点,编制了隧道自动监测系统。系统结构如图1所示。
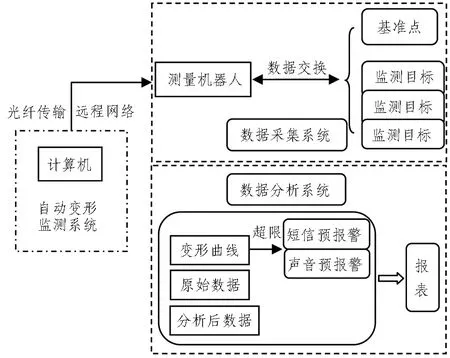
图1 整体结构图
2.3 系统的开发环境
系统以Visual Basic 6.0为开发平台,通过调用徕卡测量机器人二次开发GeoCOM函数包来实现自动控制目的。有关函数可查看参考文献[5]。
2.4 自动变形监测数据库需求分析
数据库需要实现以下主要功能:1)存入已知点点位信息;2)设置并保存定时规则;3)测量机器人控制信息的调用;4)合格数据的自动保存;5)对符合查询条件的数据进行报表输出。
主要数据流程如图2所示。
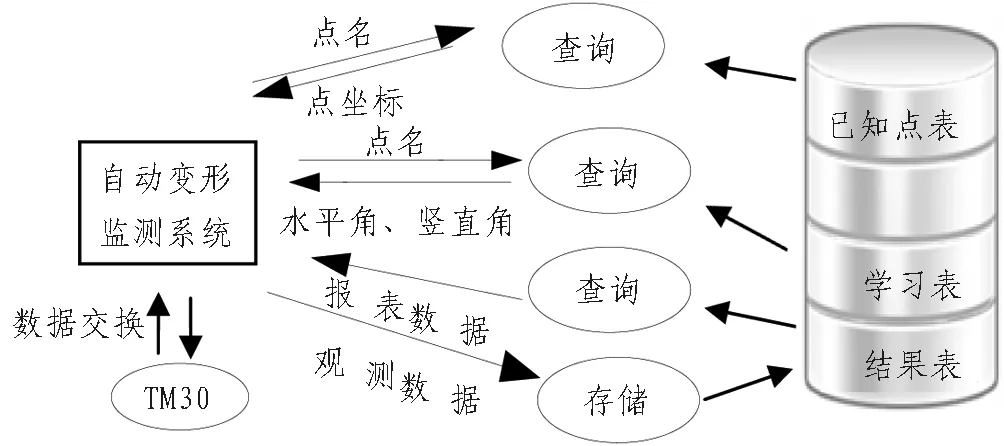
图2 数据流程图
2.5 点位布设及命名要求
隧道施工过程中的机械震动等条件会影响基准点的稳定性,因此基准点应每间隔一定的时间进行稳定性验证,基准点应设置在远离变形区或比较稳固的衬砌段,离测站距离120 m以上。
监测点按照相应规范按断面进行布设,采用标准圆棱镜作为照准物。为便于数据处理时自动匹配断面,同一个断面的监测点点名需包含相同信息,如可按里程标识,同一断面拱腰收敛点命名为“左K1+667”,“右K1+667”,拱顶点命名为“拱顶K1+667”等。
距开挖断面不同距离的点位对变形监测周期设置和限差要求不同,为了方便监测工作管理,对相同监测要求的点位进行编组处理,可命名“点组1,……”。监测点布置如图3所示。
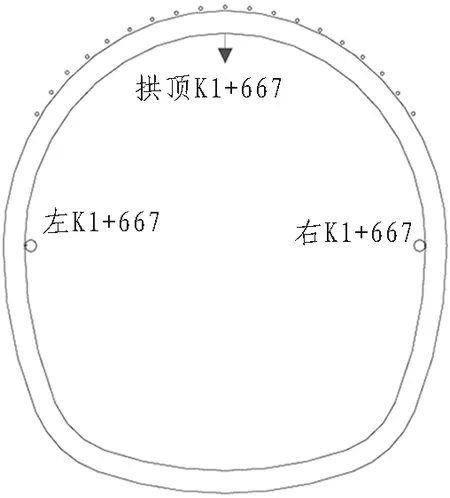
图3 监测点布设示意图
3 自动变形监测的实现[6]
3.1 数据采集系统整体结构
数据采集系统包含项目管理、设置模块和测量模块3个操作模块,最重要的功能是实现变形监测的数据采集自动化。数据采集系统结构如图4所示。
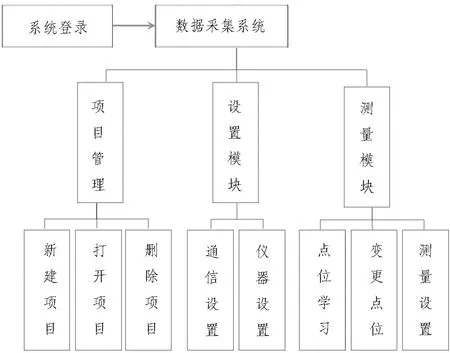
图4 数据采集系统结构图示
3.2 自动采集功能实现
3.2.1 初始值采集
此功能是把目标点的概略空间位置告诉测量机器人。采集的初始值为目标点相对于定向点的水平角和相对于测站的天顶距。
主要用到的函数如下:
1)搜索目标函数VB_AUT_Search2(0.2,1,0)。括号中的参数0.2和1分别代表仪器搜索水平角和天顶距范围大小,单位是弧度。
2)精确瞄准函数VB_AUT_FineAdjust3(0.1,0.2,0),功能是使仪器精确照准目标。
3)测角测距函数。VB_BAP_MeasDistanceAngle(BAP_DEF_DIST,hz,v,distance)。BAP_DEF_DIST为默认的测距模式;hz为水平角;v为测得的天顶距;distance为斜距。测得的hz和v参数存储在学习测量表中,两者决定了目标点的概略空间位置。
图5为测量机器人定位原理。由图5可以看出测量机器人用相对于后视点的水平角和测站天顶距2个参数即可定位到目标点空间方向。由于变形监测中不允许同一个方向有2个目标物,所以由hz和v即可得到唯一的点位信息。
3.2.2 自动测量
自动测量是隧道自动化变形监测系统的核心功能,它的功能主要是指挥测量机器人按照定时设置进行自动测量工作。
用到的函数为VB_AUT_Make Positioning4_(hz,v,POSMode,ATRMode,bDummy)。函数中的参数hz和v为水平角和天顶距,即点位学习功能中所采集的2个值;POSMode参数含义为定位模式,即定位的方式,分快速定位和精确定位;ATRMode参数为仪器ATR自动识别目标模式,分定位水平角和竖直角以及搜索目标环境中的水平角和竖直角2种模式;bDummy参数为徕卡预留参数一般设为False。
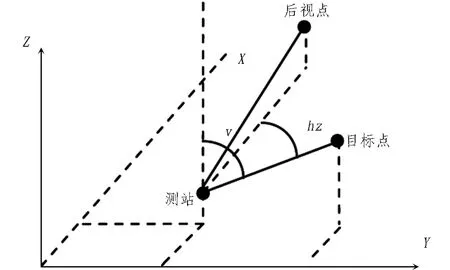
图5 测量机器人定位原理
3.3 数据传输
徕卡TM30的数据传输提供了有线和无线2种通讯模式,测量机器人安装在隧道内进行监测,限制了无线通信方式的使用,本研究采用光纤和网络实现远程传输。
测量机器人光纤传输方式是通过光端机(光调制解调器)将计算机RS232信号转换成激光信号,在光纤中进行传输,到达测量机器人站点后,再由光端机(光调制解调器)转换为标准RS232电信号,测量机器人再对RS232信号进行解析,响应的信息再通过光纤返回计算机,完成信号传输。使用光纤传输时,必须注意光纤跳线的接法,信号的传输必须交叉进行,即此光纤的TX(发)接对方的RX(收)、RX(收)接对方的TX(发)。测量机器人控制端和监测端使用光纤传输接线方式如图6所示。
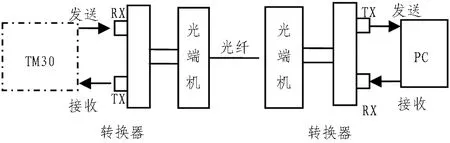
图6 光纤连线方式
测量机器人通过电缆线与网络转换器连接,转换器再连接到网络交换机上,计算机控制端使用IP分配软件对转换器设置固定IP,在此局域网内的所有用户都可以以此IP对机器人进行访问。如果交换机连接入Internet,就可以对测量机器人实现超远距离的控制。
4 数据处理
数据处理系统主要实现变形过程曲线的实时绘制、数据的后处理及数据报表和预报警功能。通过实时绘制变形曲线,能够直观、实时地查看变形情况;数据分析系统使用差分技术和小波分析对原始数据进行处理,消除或减弱测量误差;预警系统对超限数据进行预报警,及时提醒隧道变形是否超限,确保隧道施工安全。
4.1 自动绘制过程曲线
存入数据库中的数据为每个监测点的三维坐标,隧道工程主要监测拱顶沉降、拱腰收敛位移及沉降[7]。监测点沉降信息直接使用高程信息经过差分计算得到每期沉降量和累计沉降量值。收敛位移是通过同一断面的左右拱腰点的平距变化来反映的,具体做法:1)查询数据库中有相同字符的“左xx”和“右xx”;2)计算2点平距;3)计算周期间平距差量,得出收敛位移变化量。
4.2 小波去噪
通过调用小波分析工具箱,实现小波去噪功能[8]。具体做法是:在Matlab环境内把所用到的小波函数编译成M文件;使用Matcom把Matlab编写的函数(M文件)编译成VB可以调用的DLL文件;在VB中引用编译的DLL文件,即可在VB中完全调用小波工具箱函数。为使Matlab函数脱离Matlab软件运行环境,在VB调用Matlab函数过程中必须安装MCR程序。
4.3 报表
系统采用VBA技术,通过调用Excel程序和SQL Sever数据库中相关数据实现自动报表功能。根据隧道监测报表习惯设计报表格式,类型包含日报表、周报表和月报表。报表输出界面截图如图7所示,收敛位移日报表截图如图8所示。
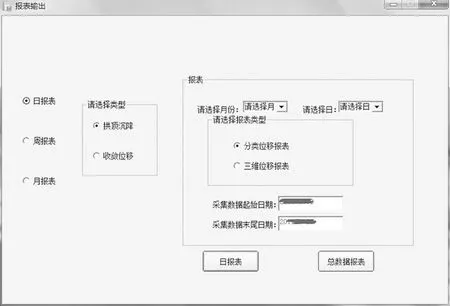
图7 报表输出界面

图8 收敛值日报表截图
4.4 预报
对数据库中沉降及收敛值的累计变形量和变形速率按一定间隔时间进行查询,根据设置的预报警值来“诊断”数据库中的数据。出现超限值,以声、光等方式报警,同时进行短信预警。
短信预警可以手动操作,也可以自动进行预警。自动短信预警的实现方法是:预警平台实时监控数据库中的累计位移和速率值,若出现超限数值,平台状态栏提示某某点数据不正常,并自动触发短信发送模块,把超限的点名和超出值自动发送给设置的接收手机号码,使施工管理人员第一时间了解隧道变形情况。自动短信预警系统截图如图9所示。
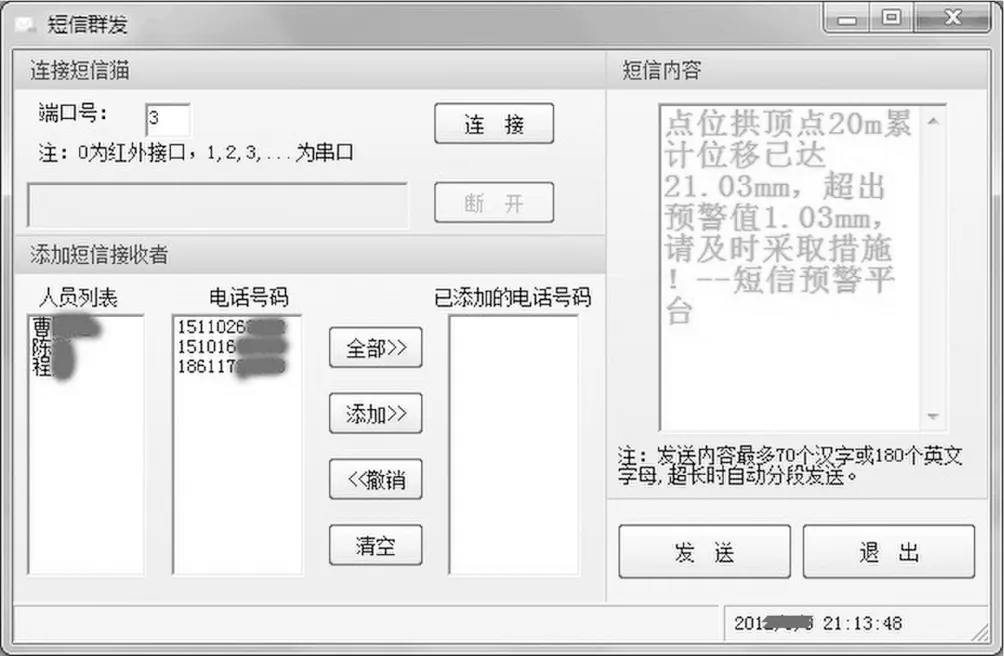
图9 自动短信预警
5 应用验证
系统在北京地铁14号线土建某标采用暗挖法施工的某一施工通道的监控量测进行了验证。通道采用直边墙马蹄形断面,尺寸为4 m(宽)×4.3 m(高)。以徕卡TM30测量机器人为设备,监测点共安装棱镜12个,形成2组断面,7个拱顶沉降观测,仪器安放采用强制对中方式,采用光纤连接局域网远程控制。
通过对监测点连续20 d的监测,结果与同时期人工方式监测对比显示:本系统自动监测采集的数据同一点同一天若干次测量数据较差优于0.1 mm,数据采集稳定;拱顶沉降、拱腰沉降及收敛位移每天累计变化量普遍优于人工监测方式0.5~1 mm,监测精度可靠。
6 结论与建议
通过二次开发TM30测量机器人实现了隧道监测过程中的数据自动采集、远程传输、自动处理和预警等功能,与同类型研究相比主要有以下几点不同:1)数据采用光纤通讯支持下的网络传输,实现了超远程控制功能;2)采用短信自动预警方式,预警机制更及时、有效;3)数据自动报表功能,实现监测数据的一键输出;4)数据采集、传输、储存、分析、输出、预报过程一体化。
但系统在应用中要注意以下问题:1)在小半径曲线段通视距离短,可能增加全站仪,开挖面多的时候仪器投入较大;2)TM30 200 m处最小棱镜分辨间距为0.3 m,拱腰监测棱镜布置时要注意防止棱镜遮挡。
此研究支持带有ATR功能的徕卡其他型号测量机器人,如TCA2003、TPS1200系列和TS30等。系统主要应用于隧道施工过程的变形监测,也可以扩展应用到其他隧道建设及运营过程的变形监测中。
[1]尤相骏.徕卡新一代GeoMoS自动监测系统在城市地铁变形监测项目中的应用[J].测绘通报,2007(1): 71-72.(YOU Xiangjun.The application of GeoMoS automatic monitoring system in city Metro tunnel deformation monitoring[J].Bulletin of Surveying and Mapping,2007(1): 71-72.(in Chinese))
[2]张书华,蒋瑞波.基于测量机器人的隧道变形自动监测系统的设计与实现[J].测绘科学,2009,34(3): 192-194.(ZHANG Shuhua,JIANG Ruibo.Design and implementation of automatic monitoring system in the tunnel distortion based on surveys robot[J].Science of Surveying and Mapping,2009,34(3): 192-194.(in Chinese))
[3]陈秀忠,钱林.地理数据通信接口技术在自动监测系统中的应用[J].测绘通报,2010(1): 42-44.(CHEN Xiuzhong,QIAN Lin.Application of GeoCOM interface technology in automatic monitoring system[J].Bulletin of Surveying and Mapping,2010(1): 42-44.(in Chinese))
[4]梅文胜,张正禄,郭际明.测量机器人变形监测系统软件研究[J].武汉大学学报:信息科学版,2002,27(2): 165-171.(MEI Wensheng,ZHANG Zhenglu,GUO Jiming.Software of Georobot deformation monitoring[J].Geomatics and Information Science of Wuhan University,2002,27(2): 165-171.(in Chinese))
[5]Leica TPS1200+ Leica TS30/TM30 GeoCOM Reference Manual[K].Switzerland:Leica Geosystems AG,Heerbru-gg,2009.
[6]范本.基于测量机器人TM30技术地铁隧道建设自动变形监测研究[D].重庆: 重庆大学土木工程学院,2012.(FAN Ben.The research of automatic deformation monitoring in subway tunnel construction based on TM30 Georobot technology[D].Chongqing:College of Civil Engineering of Chongqing University,2012.(in Chinese))
[7]中国有色金属工业协会.GB50026—2007工程测量规范[S].北京: 中国计划出版社,2008: 88-91.
[8]谢南,陈汉良.Visual Basic与Matlab的几种接口编程技术[J].仪器仪表学报,2004(8): 571-574.(XIE Nan,CHEN Hanliang.Several ways to build interface programs based on Visual Basic and Matlab[J].Chinese Journal of Scientific Instrument,2004(8): 571-574.(in Chinese))
国内首创双模式盾构在广州下线
2013年12月19日,国内首创的2台泥水、土压双模式盾构在广州下线。该设备填补了国内相关技术空白,获得国家专利,将用于广州地铁9号线的土建工程,以适应当地复杂地质条件施工的需要。据介绍,这2台泥水、土压双模式盾构,每台比以往整机进口的盾构大约可节省资金1 500万元。据广东华隧建设总经理赵晖透露,这种双模式盾构从设计研发到生产下线用了一年多的时间。
(摘自 新民网 http://news.xinmin.cn/shehui/2013/12/20/23006337.html)
Georobot-basedAutomaticDeformationMonitoringinTunnelConstruction
FAN Ben1,ZHENG Jiqiang2,ZHU Kundian3
(1.DepartmentofSurveyingandMappingEngineering,SichuanCollegeofArchitecturalTechnology,Deyang618000,Sichuan,China; 2.DepartmentofCivilEngineering,SichuanCollegeofArchitecturalTechnology,Deyang618000,Sichuan; 3.YunlongTechnologyCo.,Ltd.,Chengdu610045,Sichuan,China)
The process of data acquisition,analysis,processing and risk forecasting in the traditional deformation monitoring in tunnel construction are independent.Therefore,the response to risks is always untimely.To solve this problem,the paper studies and implements Georobot-based automatic deformation monitoring in tunnel construction.The functions of automatic monitoring data acquisition and remote storage,automatic data analysis and early warning are realized by means of Georobot,Visual Basic,GeoCOM and SQL Sever database.The purpose of the automatic monitoring of tunnel deformation is achieved; the tunnel construction safety is guaranteed.The hardware structure,software design and result processing and output of the whole system are discussed in this paper.The idea and method of automatic deformation monitoring have positive reference significance for the deformation monitoring in tunnel construction.
Georobot; tunnel construction; automatic deformation monitoring
2013-10-18;
2013-12-05
范本(1986—),男,河南商丘人,2012年毕业于重庆大学,测绘科学与技术专业,硕士,助教,主要从事工程测量及变形监测的教学与研究工作。
10.3973/j.issn.1672-741X.2014.01.004
U 455.46
A
1672-741X(2014)01-0019-05
猜你喜欢
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
水电站设计(2020年4期)2020-07-16
家庭影院技术(2020年1期)2020-06-24
中国外汇(2019年6期)2019-07-13
家庭影院技术(2019年4期)2019-04-17
小读者(2019年24期)2019-01-10
家庭影院技术(2018年9期)2018-11-02
电子制作(2017年13期)2017-12-15
小天使·四年级语数英综合(2016年11期)2016-11-29