
并联机构五自由度混联机械手虎克铰有限元分析
2014-09-06 08:20
机械与电子 2014年9期
(贵州理工学院工程实训中心,贵州 贵阳 550003)
并联机构五自由度混联机械手虎克铰有限元分析
赵艺璇
(贵州理工学院工程实训中心,贵州 贵阳 550003)
0 引言
随着机电一体化技术的迅速发展,机械手这种机器人技术和机床技术相结合的产物应运而生,引起了国际上广泛关注。机械手及其零部件的结构也日趋高精度化和复杂化。传统的设计方法,如类比设计法和经验设计等方法烦琐且设计粗糙,耗费大量人力,物力,也很难获得各项指标优良的设计方案,不能满足现代机械设计的要求。为此,采用SolidWorks软件,对并联机构五自由度混联机械手虎克铰进行有限元分析和研究,得出的分析结果,对于虎克铰在机械手上的应用具有一定的参考价值。
1 虎克铰在并联机构五自由度混联机械手上的工况分析
1.1 并联机构五自由度混联机械手
并联机构如图1所示。所研究的虎克铰,是并联机构五自由度混联机械手上应用的零部件之一,它现实生产中主要运用在汽车修复中的机械手,适用于重复工作的、可以改变动作程序的自动修复设备,操作单调频繁的生产场合。并联机构五自由度混联机械手,是PR-2UPS并联机构构成的五自由度混联机械手,模型由动平台1条PR支链和2条UPS支链并联构成,由定长连杆通过导轨滑块与机架相连,一端由转动副R与动平台相连。

图1 并联机构
1.2 约束条件的确立
平移时的行程为1000mm。对于每条UPS支链,一端通过内套筒链接球面副与动平台连接,另一端通过虎克铰与机架链接,由2条支链的伸缩来控制动平台的转动,其中球副的最大摆角为30°,通过动平台扫过的扇形面积实现 800mm的行程。机架内连接滑块,该滑块可以沿着固定于基座的滑道上下移动,实现500mm行程,机械手末端的可达工作空间为1000mm×800mm×500mm,虎克铰旋转角度为0°。在载荷为400N时进行静力分析。
2 基于SolidWorks软件有限元分析
2.1有限元分析流程
有限元的核心思想是结构的离散化,就是将实际结构假想地离散为有限数目的规则单元组合体,实际结构的物理性能可以通过对离散体进行分析,得出满足工程精度的近似结果来替代对实际结构的分析,这样可以解决很多实际工程需要解决而理论分析又无法解决的复杂问题[1]。简言之,有限元分析可分成3个阶段,前处理、处理和后处理,主要流程如图2所示。这里只进行静力分析。建立有限元模型属于前处理,主要完成单元网格划分,是处理和后处理的基础。对PR-2UPS并联机构构成的五自由度混联机械手建立正确的有限元建模,生成合理的网格,可以得到精确的有限元分析结果。
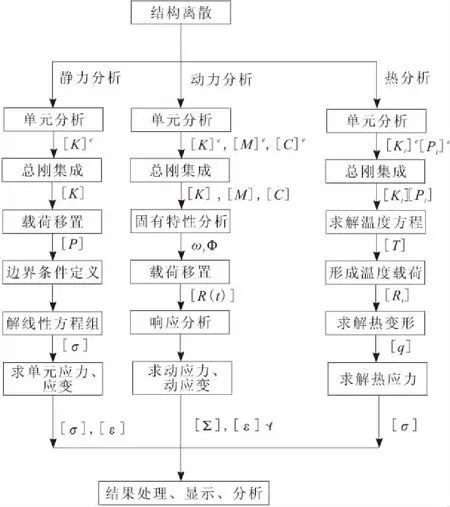
图2 有限元分析流程
2.2 基于SolidWorks Simulation有限元建模流程
利用SolidWorks Simulation软件,对PR-2UPS并联机构构成的五自由度混联机械手进行有限元分析,建立有限元模型的一般过程如图3所示。

图3 有限元建模流程
有限元建模具体操作过程为:
a.将UG 6.0建立的零件实体模型导入SolidWorks 软件中,重新进行装配,简化装配图[2]。
b.将装配图直接在SolidWorks Simulation打开。
c.定义接触的各面及零部件的接触。
d.选择网格的划分类型,划分网格。
建模阶段是根据结构实际形状和实际工况条件建立有限元分析的计算模型(有限元模型),从而为有限元数值计算提供必要的输入数据。根据SolidWorks Simulation软件中网格划分流程,虎克铰有限元模型的建立如图4所示。
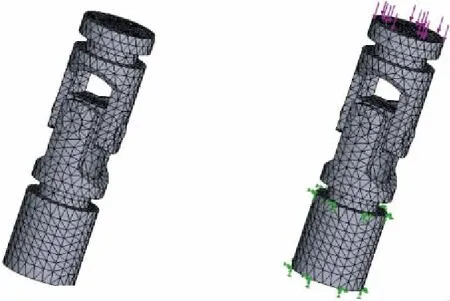
图4 虎克铰有限元网格划分
3 加载与分析
这里所讨论的机械手主要用于汽车修复,所受的力基本是自身重力,又因为机械手大约为90kg,自身重力为900N,因此,整体受力分析时施加载荷1000N,方向竖直向下的。确定定位面,将载荷施加在实体上,对虎克铰进行后处理,在X轴、Y轴和Z轴方向上的分力通过有限元软件自动生成。有限元计算求解完毕后,查看计算的结果,来判断和验证有限元分析是否正确,通过应力、应变和变形图来分析机构设计存在的不足。在SolidWorks Simulation分析软件中,使用颜色来区分各部件受力以后应力、应变和形变的发生情况,这样可以通过色谱图直观地了解模型的受力变化情况。比分析大量复杂数据更加简便快捷,更好地得到结果。在色谱图上,从各数值由大到小变化对应的颜色的变化依次是由红到蓝逐渐过渡,从红色到蓝色有各种色带分布,这里设定13种[3]。
旋转角度为0°,载荷400N的情况下静力分析图如图5所示。应变图如图6所示。可以发现应变图与应力图的颜色变化是完全相同的,也就是应力大的地方应变也大,最大值为4.01×10-7。根据图7显示的位移图,发现虎克铰的十字轴变形不大,但受力端的变形相对较大,最大值为3.83×10-5mm,从图7中可以观察到直接受力的地方变形最大,离固定端越远,变形越大[4]。

图5 虎克铰应力
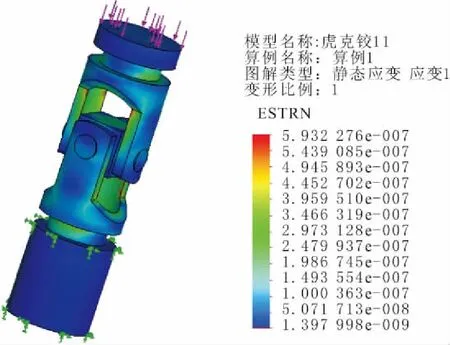
图6 虎克铰应变
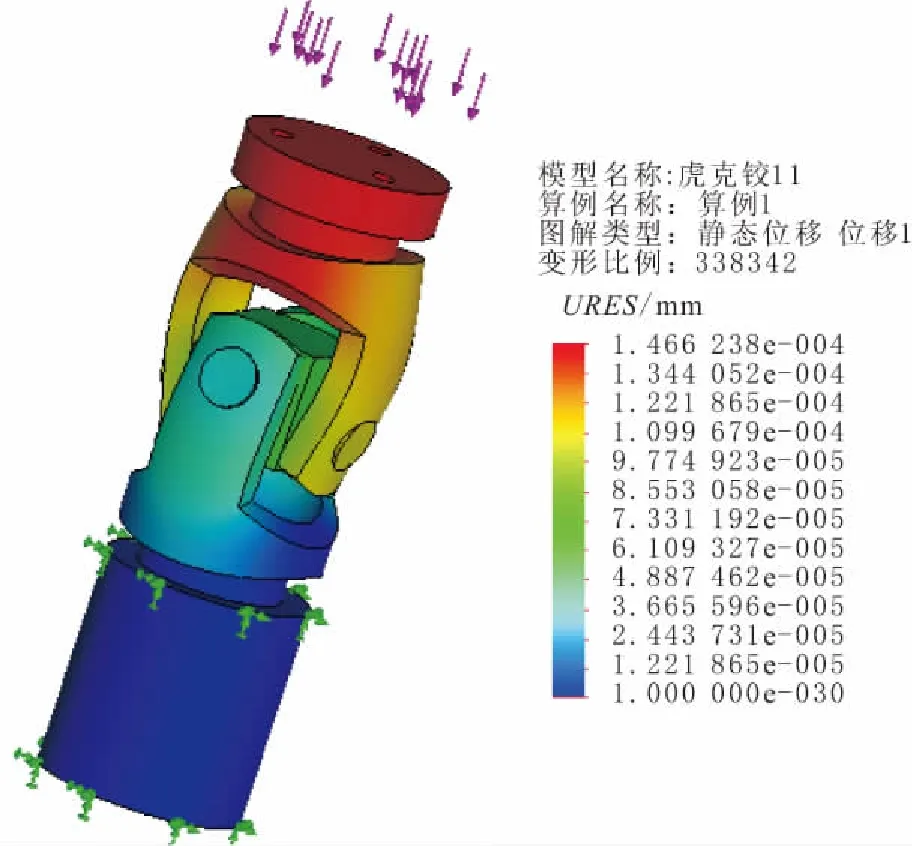
图7 虎克铰位移
4 结束语
虎克铰作为并联机构的一个重要连接件,它带来的误差会直接影响机械手的精度。以SolidWorks软件为平台,对并联机构虎克铰进行了分析,为并联机械手的设计提供一定的参考依据。通过对并联五自由度机械手虎克铰的应力、应变和位移图分析以及整理的数据分析,可知虎克铰是应力集中较大部位。也就是说在工作过程中,虎克铰离固定端越远,变形越大,磨损越快,导致虎克铰使用年限短。虎克铰链应力会使机械手变形产生间隙,会引起机械手的机械误差。应力越大,产生的应变也就越大,两者成正比关系。
[1] 康国政.大型有限元程序的原理、结构与使用[M].2版.成都:西南交通大学出版社,2008.
[2] 张云杰.UG NX 6.0零件与装配设计[M].北京:清华大学出版社,2010.
[3] 李 彬,黄 田,张利敏,等.一种新型五自由度混联机械手的概念设计及尺度综合[J].中国机械工程,2011,22(16):1900-1905.
[4] 冯志友,张 燕,杨廷力,等.基于牛顿欧拉法的2UPS-2RPS并联机构你动力学分析[J].中国机械工程,2009,40(4):193-197.
Five Degrees of Freedom Hybrid Parallel MechanismManipulator Hooke Joint Finite Element Analysis
ZHAOYixuan
(Engineering Training Center,Guizhou Institute of Technology,Guiyang 550003,China)
根据机械手虎克铰的基本工作原理,基于SolidWorks软件,建立了并联机构构成的五自由度混联机械手虎克铰有限元分析方案,并分别针对机械手应力、应变和位移进行了有限元分析。研究表明,有限元分析法运用在机械手零部件分析上能够直观发现设计存在的不足和问题,对于推进并联机器人技术的工程应用具有重要的实用价值。
五自由度;有限元分析;虎克铰
According to Hooke hinge robot basic working principle,the establishment of a universal joint hybrid finite element analysis program based on five degrees of freedom manipulator SolidWorks software for parallel mechanism constituted respectively for robot stress,strain,displacement finite element analysis,research show that the finite element analysis method used in the analysis of robot parts can be found insufficient and intuitive design problems exist. For propulsion engineering applications of parallel robot technology has important theoretical significance and practical value.
five degrees of freedom;finite element analysis;Hooke’ s joint
2014-04-30
贵州理工学院科学基金资助项目(XJRW20131201)
TP241
A
1001-2257(2014)09-0060-03
赵艺璇(1990-),女,贵州遵义人,学士,研究方向为机械设计制造及自动化。
猜你喜欢
湖南电力(2022年3期)2022-07-07
中学生数理化·中考版(2021年10期)2021-11-22
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年17期)2018-09-28
制造技术与机床(2017年4期)2017-06-22
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
