基于激光位移传感器的柔性喷管动态摆心非接触测量方法①
2014-09-07 10:26张丹阳夏云峰李信元
固体火箭技术 2014年2期
张丹阳,夏云峰,李信元,赵 亮
(中国航天科技集团公司四院41所,西安 710025)
基于激光位移传感器的柔性喷管动态摆心非接触测量方法①
张丹阳,夏云峰,李信元,赵 亮
(中国航天科技集团公司四院41所,西安 710025)
为了开展柔性喷管全轴摆动动态摆心测试,设计了一种以激光位移传感器、测控装置为基础的测试系统。通过建立数学模型,搭建试验测量装置,利用数据采集处理系统得到了动态摆心漂移数据。该系统采用高精度高频响的激光位移传感器保证了动态响应速度,程控调平机构解决了传感器的精确定位问题,软硬件滤波较好地剔除了扰动信号。系统采样频率2 kHz,输出测量数据频率不低于1 kHz;与静态方法相比较,测量相对误差不大于1%。结果表明,该系统能够准确、实时地测试喷管全轴摆动时的摆心漂移轨迹。
柔性喷管;动态摆心测试;激光位移传感器
0 引言
摆心漂移是柔性喷管设计时的一项重要参数,它反映着柔性接头在燃烧室压强作用下实际摆心偏离理论摆心的规律。由于摆心漂移会对喷管摆动时的实际间隙、作动筒行程与摆角关系的变化及作动力臂的变化等方面产生影响,所以柔性喷管的摆心测试始终是固体火箭推力向量控制试验中的一个重要环节[1]。
目前,柔性喷管摆心漂移的精确测试与计算方法很难建立,再加之在冷态模拟喷管工作条件下的载荷十分困难或几乎不可能,使得摆心漂移的测试工作须花费很大精力,且不容易取得满意结果。而且,国内也没有测量喷管摆心漂移的专门设备。朱耄祥[2]研制了基于线阵CCD探测器的摆心浮动量的光电动态实时测量系统,但精度受测量环境影响较大,目前已不适用。杨冀英等[3]提出了基于位移计、摆杆和喷管作动器反馈的喷管摆心测量方法,利用位移计测出的位移量先计算出相应的摆角,然后推算出摆心漂移。这种方法属于接触式测量方法,也是目前喷管冷态试验中常用的方法,测试过程繁琐,且精度较差。Reynolds等[4]研究了后摆心推力向量柔性喷管的材料选择和性能测试问题,指出喷管材料对喷管摆心和摆角的影响很大。Robert等[5]研究了柔性喷管摆心、摆角和轴向位移对于推力向量控制的影响问题。Gaffin等[6]研究了NASA某型号固体火箭发动机柔性喷管的动态摆心性能。Donat[7]研究了固体火箭发动机柔性喷管的理论摆心和实际摆心漂移的问题。Seely等[8]介绍了基于砷化镓近红外激光二极管和位移传感器的喷管摆角测试系统,提出喷管摆心轴向漂移至少需要4~6组近红外激光二极管和位移传感器来测量,但未给出摆心测量方案。
随着弹总体对推力向量控制精度要求的不断提高,实际工作中用不十分精确的摆心漂移预估值作为固体发动机动力方向控制的参考值已不适用,因此迫切需要开展柔性喷管全轴摆动状态下的动态摆心试验研究。基于大量的冷态喷管全轴摆动性能分析试验,本文提出了一种柔性喷管全轴摆动状态下动态摆心的试验测量方法。该方法利用激光位移传感器采集试验数据,具有测试精度高、频响快、不受测量环境影响等优点,实现了动态摆心的非接触式测量,能准确得到柔性喷管全轴摆动过程中摆心数据和摆心三维运动轨迹。
1 柔性喷管全轴摆动动态摆心测试原理
1.1 柔性喷管全轴摆动动态摆心测试装置
柔性喷管全轴摆动的动态摆心数据是通过柔性接头全轴摆动动态摆心测试试验获得的。如图1所示,试验时通过固定体和活动体先将柔性接头安装在冷试高压容器上,活动体上固定摆杆和推力架模拟喷管扩张段,摆杆轴线与柔性接头轴线重合,安装在摆杆90°方向上的2个伺服作动器用于实现柔性接头的全轴摆动,通过对摆杆上特定点在摆动过程中的位置变化进行测试,利用数学模型计算出实际摆心位置的变化情况。
摆杆的顶端与轴线相垂直地装一平板,称为Z板,激光位移传感器Z3的轴线重合于摆杆的轴线,其在Z板上的投影为坐标系的原点O(此时容压为零压),OZ轴即重合于摆杆的轴线;推力向量作动器1、2分别分布于OXZ和OYZ平面内,这样固定坐标系OXYZ即被选定。在摆杆上装有2块平板,分别垂直于X轴(称X板)和Y轴(称Y板),激光位移传感器X2、X1和Y2、Y1分别垂直于X板和Y板,且X2与Y2,X1与Y1的延长线分别交于Z轴上两点,其交点坐标依次为(0,0,-Z2)、(0,0,-Z1);X板和Y板到坐标点的距离皆为R0[9]。

图1 试验装置示意图Fig.1 Schematic of experiment device
1.2 柔性喷管全轴摆动动态摆心算法

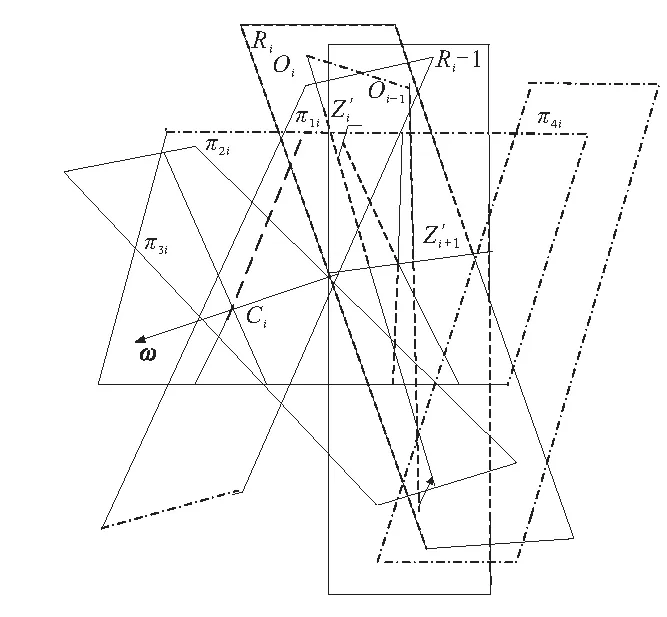
图2 喷管的瞬时转轴及其几何中心线的瞬时摆心Fig.2 Axes of rotation of nozzle and the transient pivot point of centre line of nozzle
命喷管的几何中心线为Z′轴,它不同于坐标系中的Z轴。Z′轴的方程:
(1)
Z板平面方程:
(2)
联立解方程(1)、(2),得Oi点。Oi点为Z′轴上一点,初始状态时同坐标原点重合。
设相邻二时刻Oi点的瞬时转动中心所在的平面为π1i,则有
(3)
为了求喷管的瞬时转轴,还必须寻求第2个点在同一时间间隔内的摆动中心所在的平面,令这个平面为π3i,π3i与π1i平面的交线便是瞬时转轴。当π3i⊥π1i时,瞬时转轴的精度最高。
喷管上另一点瞬时摆心所在的平面π3i的方程如下:
(4)
平面π1i与π3i的交线即为求得瞬时转轴。
令喷管几何中心线Z′轴的摆动平面为
(5)
联立解方程(3)~(5),即可求喷管几何中心线的瞬时摆动中心Ci(xci,yci,zci),即喷管摆动中心上的一点[9]。
2 摆心测量系统组成
柔性接头全轴摆动激光位移动态摆心测量法利用安装在摆杆测试架上3个方向的5个激光位移传感器的激光束反射来实时测量柔性接头在X、Y、Z3个方向上的直线位移变化情况,通过对摆杆上特定点在摆动过程中的位置变化进行测试、计算出实际摆心位置。本系统主要由测控计算机、柔性接头摆心测量系统控制器、程控调平机构、激光位移传感器、PCI总线采集设备五部分组成。系统框图如图3所示。
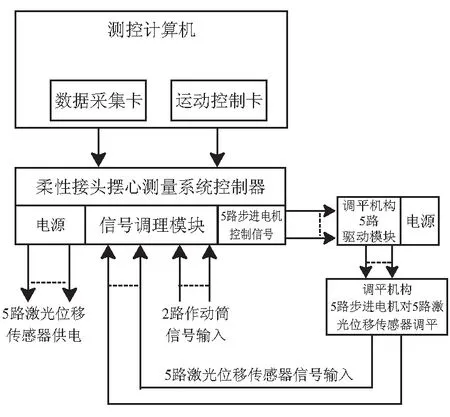
图3 系统框图Fig.3 System block diagram
图4为传感器系统装配示意图,摆杆的X、Y、Z轴安装激光位移传感器。其中X、Y轴分别上下安装2个激光位移传感器,顶部Z轴方向安装1个激光位移传感器。传感器被安装在调平机构上。
2.1 传感器选择
目前,位移传感器主要有激光位移传感器、电涡流位移传感器、电容位移传感器、超声波位移传感器等。与其他传感器相比较,激光位移传感器直线度特性优良、分辨率高、响应速度快、跟随性好,并且使用环境也更广泛。本系统的测量目标是实现柔性喷管在全轴摆动过程中摆心位置变化轨迹的动态连续测量,为了保证测量精度和高响应频率,系统选择高精度高响应频率的激光位移传感器和高采样率的PCI同步采样模块作为硬件基础。
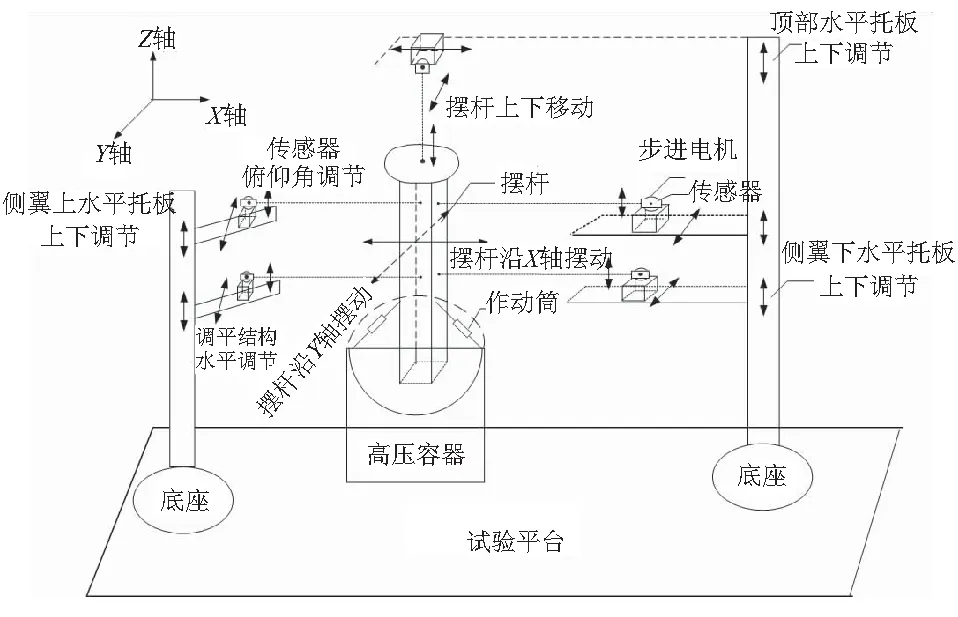
图4 系统装配示意图Fig.4 Schematic for assemblage of sensor system
2.2 传感器程控调平及精确定位
传感器的安装定位精度会对柔性喷管摆心测量精度直接产生影响,要求传感器初始安装时应与摆杆的测量面必须保持垂直。本系统巧妙地通过调平机构快速安装定位传感器。调平机构基于步进电机设计,直接由计算机程序控制。在试验前调整调平机构的俯仰角度,摆心测试系统会同时监视激光传感器的输出值。系统会将调平机构在调整角度过程中的俯仰角度和激光传感器的输出进行关联,当程序判断出激光传感器和摆杆的距离最短时(如图5所示),也就是相对的垂直点了,系统会记录现在的传感器数值为测试起始点或者说是零点。这种调整方式对垂直的判断相对快速准确且减少了人工安装定位带来的误差。
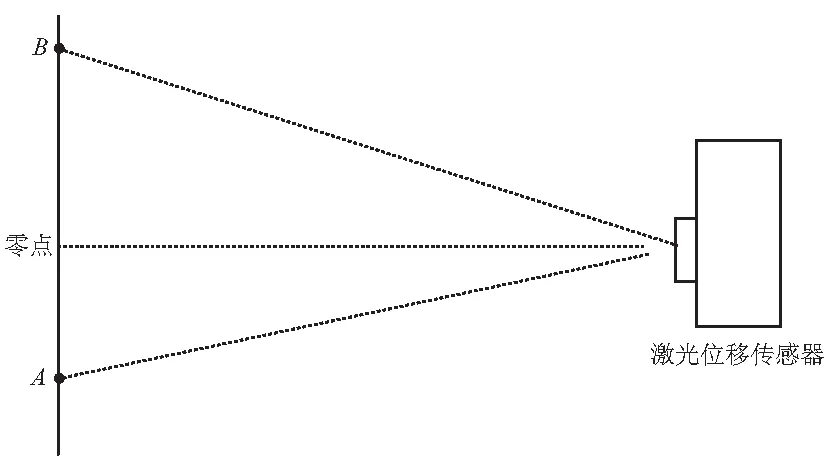
图5 传感器试验零点调节示意图Fig.5 Schematic for adjusting experimentation zero of sensor
2.3 数据处理
通过大量试验发现,传感器初始采集数据存在很大的扰动,直接影响后续计算。经过分析,柔性喷管摆动过程中作动器的抖动是主要影响因素,扰动信号的频率为5~20 Hz,区别于传感器所采集信号。首先通过硬件滤波,在采集数据时直接对该频段信号进行过滤;其次,在数据处理时,利用巴特沃斯滤波器对曲线作滤波处理,即可剔除掉绝大部分干扰信号,达到理想效果。
3 实测结果
以某型号柔性接头为测量对象,传感器初始采集值与摆心漂移测量结果如图6所示。
通过对曲线扰动点判定与剔除,经过计算得到的动态摆心试验数据如图7、图8所示。
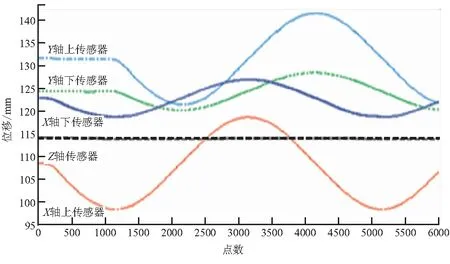
图6 传感器初始采集值Fig.6 Initial acquisition value from sensor
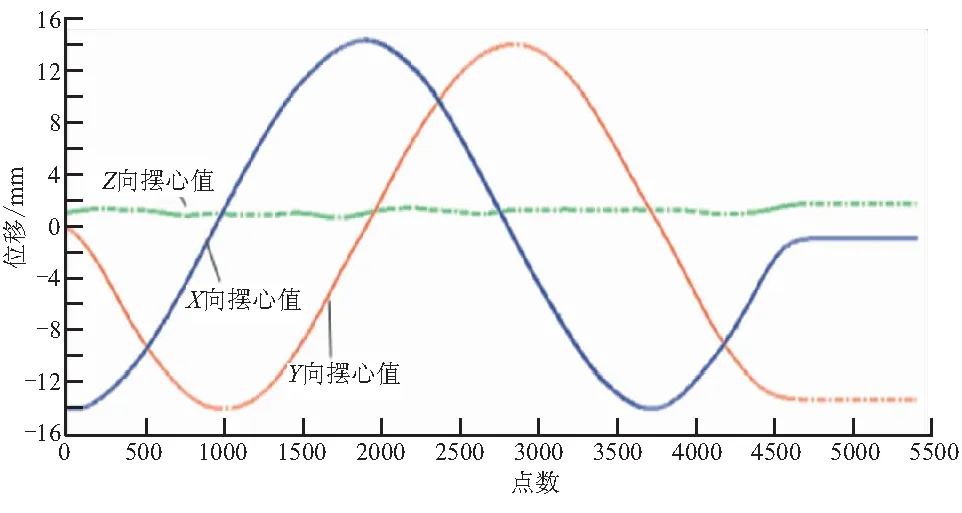
图7 摆心漂移Fig.7 Pivot point excursion
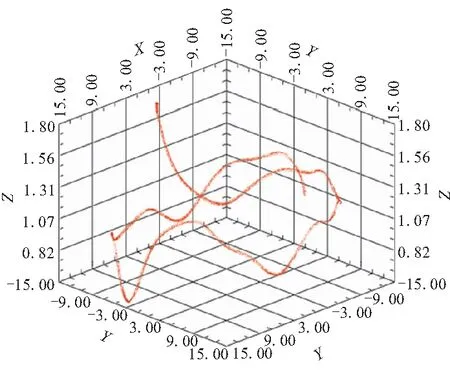
图8 摆心三维运动轨迹Fig.8 3D motion curves of pivot point
表1为柔性喷管全轴摆动静态特征点测试数据与本文方法所测的动态瞬时数据比较。

表1 特征点静态测量与动态测量数据Table 1 Measured data of feature point with static and dynamic methods
4 结论
(1)本文设计的柔性喷管全轴摆动动态摆心测量系统解决了多项技术问题,如传感器程控调平及精确定位、扰动数据的剔除、数学建模等。
(2)本文方法属于非接触式动态测量方法,系统采样频率2 kHz,输出测量数据频率不低于1 kHz,相对测量误差不大于1%。摆心数据与摆心漂移范围真实准确,可实时反映喷管全轴摆动的动态特性。
[1] 黄坚定.固体火箭发动机设计与研究(下)[M].北京:宇航工业出版社,1991.
[2] 朱耄祥.光电摆角动态测量原理及其测量系统[J].光电工程,1993,20(1):56-64.
[3] 杨冀英,杜保华.摆杆形变对柔性接头摆心、摆角数据的影响[J].强度与环境,2007,34(1):55-58.
[4] Reynolds H M,Orville E,et al.Materials development for aft-pivoted techroll TVC joint [C]//AIAA/SAE 11th Propulsion conference.Anaheim,California:[s.n.],1975:1-13.
[5] Robert F H,Woodberr Y.Flexible joints for thrust vector controls[C]//AIAA/SAE 11th Propulsion Conference.Anaheim,California:[s.n.],1975:1-18.
[6] Gaffin R D.Space shuttle solid rocket booster nozzle flexible seal pivot joint dynamics[C]//AIAA/SAE 13th Propulsion Conference.Orlando,Florida:[s.n.],1977:1-7.
[7] Donat j R.Solid rocket motor nozzle flexseal design sensitivity [C]//AIAA/ASEE,Aerospace Design Conference.Irvine.Canada:[s.n.],1993:1-10.
[8] Seely J,Torick R,Mascio W.Nozzle vector angle determination using a laser measurement system[C]//AIAA/SAE/ASME/ASEE 26th Joint Propulsion Conference. Orlando,Florida:[s.n.],1990:1-8.
[9] 杨世学.柔性喷管全轴摆动动态特性分析与计算[J].宇航学报,1985 (1):66-70.
(编辑:吕耀辉)
Non-contact measuring method for pivot point of omni-axialmovable flexible joint nozzle based on the laserdisplacement sensor
ZHANG Dan-yang,XIA Yun-feng,LI Xin-yuan,ZHAO Liang
(The 41st Institute of 4th Academy of Aerospace Science and Technology Corporation,Xi’an 710025,China)
In order to investigate the dynamic test for pivot point of the omni-axial movable flexible joint nozzle,a test system basted on laser displacement sensor and measurement device was designed in this paper.By setting up mathematical model and constructing a set of experimental system,the dynamic test data of pivot point was obtained by the data-acquisition system.The dynamic response speed of the test system was guaranteed by laser displacement sensor with high precision and high frequency.The problem of sensor accurate positioning was solved by the SPC leveling mechanism.Disturbance signals were eliminated by data processing.The sampling frequency and the output data frequency are respectively about 2 kHz and 1 kHz.Compared with static method,the relative error was not greater than 1%.Test result shows that the system can measure the track of pivot point reliably in real time when the flexible join nozzle is omni-axial moving.
flexible joint nozzle;dynamic test of pivot point;laser displacement sensor
2013-02-27;
2013-05-20。
张丹阳(1985—),男,硕士,主要从事固体火箭发动机推力矢量控制实验研究。E-mail:popzhang1@163.com
V435
A
1006-2793(2014)02-0281-04
10.7673/j.issn.1006-2793.2014.02.027
猜你喜欢
卫星应用(2022年7期)2022-09-05
物流技术与应用(2022年5期)2022-06-17
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
数字制造科学(2021年2期)2021-08-23
山东理工大学学报(自然科学版)(2021年4期)2021-05-12
文化创新比较研究(2020年7期)2021-01-13
环球慈善(2019年6期)2019-09-25
汽车零部件(2019年7期)2019-08-16
专用汽车(2018年7期)2018-07-24