帆板驱动微振动对卫星的影响与对策
2014-09-12 12:53周伟敏张子龙施桂国朱庆华
噪声与振动控制 2014年2期
周伟敏,张子龙,施桂国,朱庆华
(1.上海航天技术研究院,上海201109;2.国防科技大学航天与材料工程学院,长沙410073;3.上海航天控制技术研究所,上海200233)
帆板驱动微振动对卫星的影响与对策
周伟敏1,2,张子龙3,施桂国3,朱庆华3
(1.上海航天技术研究院,上海201109;2.国防科技大学航天与材料工程学院,长沙410073;3.上海航天控制技术研究所,上海200233)
基于帆板驱动机构精确建模,对帆板及其驱动带来的影响进行分析;在分析帆板驱动特性的基础上,给出了微振动测试数据及其分析结果;并以某卫星为例给出了帆板驱动控制时微振动对姿态的影响,提出了频率约束和振动主动抑制控制相结合的解决措施及验证结果。
振动与波;帆板驱动机构;微振动;频谱分布;主动振动抑制
卫星的姿态指向精度和稳定度对高质量的成像卫星非常重要,此时星上各种转动部件和各种微振动源经整星结构传递,与挠性附件或其它转动和微振动源相互作用,有可能形成卫星的颤振响应。
针对卫星颤振响应对卫星姿态控制的影响及相应的抑制措施,国外研究较早。国内对此也进行了初步的研究,刘天雄等在2009年第1期《航天器工程》的《卫星飞轮扰振控制技术研究》[1]中,对在某卫星中飞轮产生的振动使地平仪强迫振动响应进行了相关分析,并给出了工程解决方案。星上运动部件,包括飞轮及早期的磁带机等均可能对卫星产生影响,在轨卫星中也有个别卫星因此而产生颤振响应[2]。
帆板驱动体积大、刚度低,属于大惯量的挠性构件,它们与星体之间由于存在动力学耦合,因而对卫星姿态控制的精度和稳定度会产生重要影响,尤其是帆板转速控制不够平稳的特性[3]。为满足高分辨率成像的需求,需要着重考虑帆板驱动带来的影响。一些相关文献从定位力矩补偿出发降低帆板驱动对稳定的影响[4],也有从改进步进电机驱动控制逻辑抑制驱动对稳定度的影响[5]。这些研究一般从优化与改进驱动本身出发进行相关研究。此外,文献[6]—[10]还分别从太阳翼阻尼器冲击力矩、太阳帆板驱动机构、以及主动振动控制等方面研究了提高卫星稳定度的方法。
本文在分析帆板驱动特性的基础上,以在整星实际状态下的测试数据为基础进行了分析,阐述了帆板及其驱动带来的可能影响,并以某卫星为例给出了阐述。在此基础上,针对帆板及其驱动的影响,给出了对策。
1 帆板驱动特性及精确建模
1.1 驱动机构精确模型
帆板驱动机构包括驱动器、步进电机、减速器、轴承等,针对帆板驱动的精确建模主要围绕步进电机模型展开。两相双四拍方式步进电机的动态方程包括运动方程和电压平衡方程,如式(1)所示
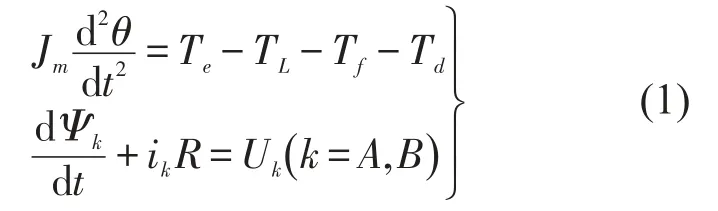
式中θ分别为电机输出轴上的转角;R,L分别为单相绕组的电阻和自感;Uk,ik为第k相绕组的电压和电流(k=A,B),Ψk为磁链,Te,TL,Tf,Td分别为电机的电磁力矩、负载力矩、摩擦转矩和干扰力矩;Jm为电机主轴的转动惯量;k为步进电机的旋转电势系数。式(1)中旋转感应电压为
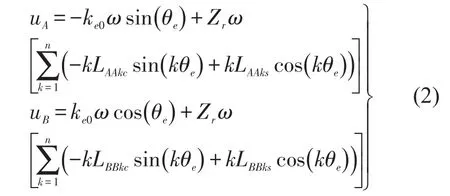
式中Zr为步进电机的齿数,θe为电角度即电机转子转过的角度和齿数的乘积,ke0=ZrΨm为旋转电压系数。LAA,LBB为自感系数,可以通过实验测出。k=2表示双拍运行。
电机力矩方程中的各力矩量为
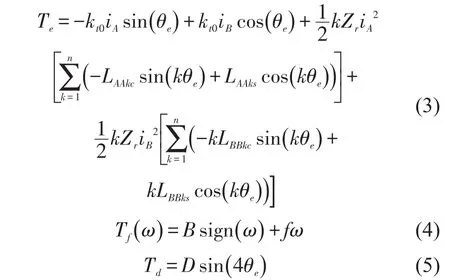
式中kt0通常称为转矩系数,是不饱和值。ω为步进电机转速,B为库伦摩擦力矩,f为粘性摩擦力系数,式(5)表示步进电机定位转矩与相电流频率的4 n倍谐波分量这一关系。
1.2 驱动机构和帆板动力学耦合模型
太阳电池阵的驱动方案有多种[3],一种常见的驱动方案为采用间接驱动,电机使用永磁感应式步进电机,采用谐波齿轮进行传动,为实现高稳定度驱动采用细分驱动线路。步进电机步距角经细分驱动后,对应步距的均匀性、步距精度、转速的稳定性(步进电机的振荡)等都需要给予充分的关注[6]。卫星使用帆板驱动机构进行驱动控制,其转速控制稳定度不足够平稳,由此直接影响卫星姿态控制精度和稳定度。
太阳电池阵及其驱动模型如图1所示,图中给出了步进电机、谐波减速器、滑环轴承和太阳电池阵的相对关系[7,8]。
对应的数学模型表示如下式(6)所示
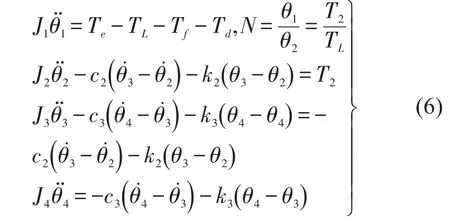
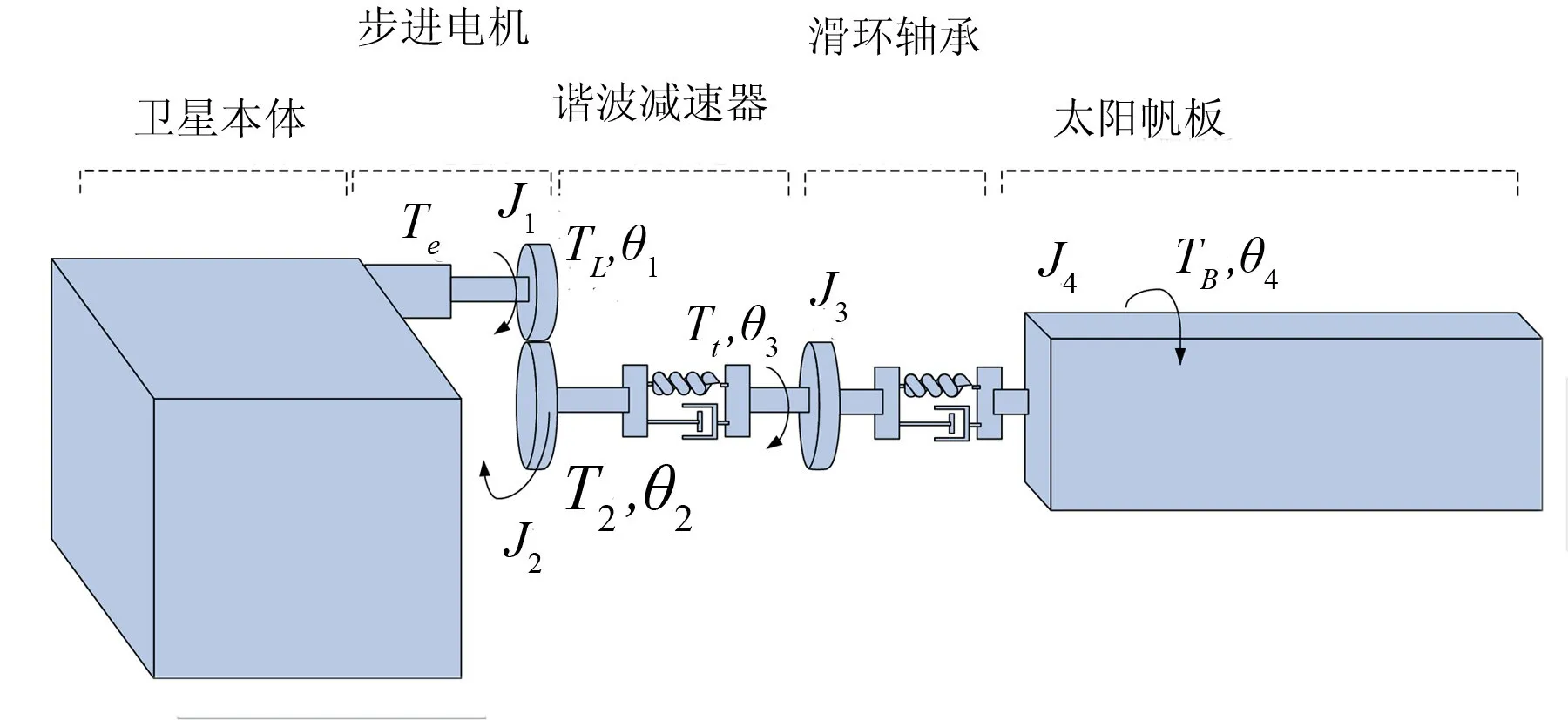
图1 帆板及帆板驱动耦合模型示意图
式中J1、J2、J3、J4分别为步进电机、谐波减速器、滑环轴承和帆板的转到那个惯量,N为传动比,θ1、θ2、θ3、θ4分别为步进电机、谐波减速器、滑环轴承和帆板的转角。
2 试验测试与数据分析
下面为某卫星在整星状态下进行的微振动测试,此时卫星及相关单机与发射和在轨运行状态一致,测试中模拟各种实际在轨运行工况。图2、图3给出的是帆板驱动机构低转速和高转速的时域与频域响应,测点为帆板驱动机构电机部分。
从以上测试结果中可以看出,帆板0.054 9度/s驱动速度时机构振动的频域集中点为0.76 Hz和1.52 Hz;0.6度/秒的驱动速度时机构振动的频域集中点为8.33 Hz及其相关倍频,测试结果与精确模型计算的结果一致。

图2 帆板0.054 9度/秒驱动时时域响应和频谱
3 帆板驱动时对卫星姿态的影响和对策
帆板驱动机构中步进电机的转动是造成挠性帆板振动的主要因素之一,当挠性帆板结构振动模态中存在与步进电机驱动振动频率接近的情况时,会造成帆板相应模态的共振。改变驱动机构的驱动频率以避开帆板结构模态是一种有效的方法,这需要在设计中对帆板驱动与帆板进行统一设计,实现频谱的统一分布。比如,帆板驱动的基频可从0.76 Hz降低到0.1 Hz左右,与此同时帆板挠性频率要同时避开基频及其相关倍频。

图3 帆板0.6度/s驱动时域响应和频谱
此外,通过对在轨帆板振动频率的辨识,利用输入成型方式可以实现对振动的主动抑制控制。以两相双四拍型步进电机为例设计输入成型控制器,其中电机相关参数如下选取:电磁力矩系数kt0=5 NmA-1,电机转子齿数Zr=300,步距角0.3°,电机转轴转动惯量Jm=4×10-4kgm2,正余弦细分电流幅值I0=0.5 A,采取512细分,4阶谐波定位转矩幅值0.06 Nm,摩擦力采用静态Stribeck模型描述。假设帆板1~3阶挠性振动频率依次为0.08 Hz,0.22 Hz,0.35 Hz,阻尼系数依次为0.01,0.005,0.005,得到1~3阶挠性振动抑制均采用ZV成型滤波器如下所示。
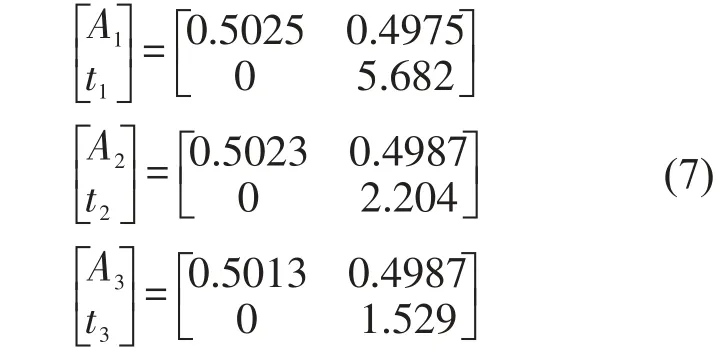
式中Ai表示抑制第i阶挠性振动所需施加的脉冲强度序列,ti表示抑制第i阶挠性振动的脉冲施加时间序列(单位为s),其对振动抑制控制效果如图5所示。
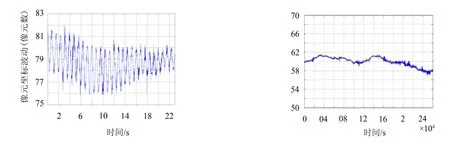
图4 卫星载荷图像上体现的频率隔离前后振动情况比对
4 结语
在分析帆板驱动特性的基础上,着重对某在轨卫星微振动的测试数据进行了分析,对帆板及其驱动的影响以在轨某卫星为例给出。在此基础上,提出整星顶层设计进行频谱的统一规划是一种从根本上的解决措施。
如上的分析和结论为顶层设计提供了一定的依据,也为相关设计提供了参考。
[1]刘天雄,范本尧,杨慧.卫星飞轮扰动控制技术研究[J].航天器工程,2009,18(1):53-60.
[2]Sng G,Buck N V,Agrawal B N.Spacecraft vibration reduction using pulse-width pulse-frequency modulated inputshaper[J].JournalofGuidance,Control,and Dynamics,1999,22(3):433-440.
[3]Iwata T,Yoshizawa T,Hoshino H,et al.Precision attitude and orbit control system for the advanced land observing satellite(ALOS)[C].AIAA Guidance,Navigation,and ControlConference,AIAA-2003-5783,Austin,USA.2003.
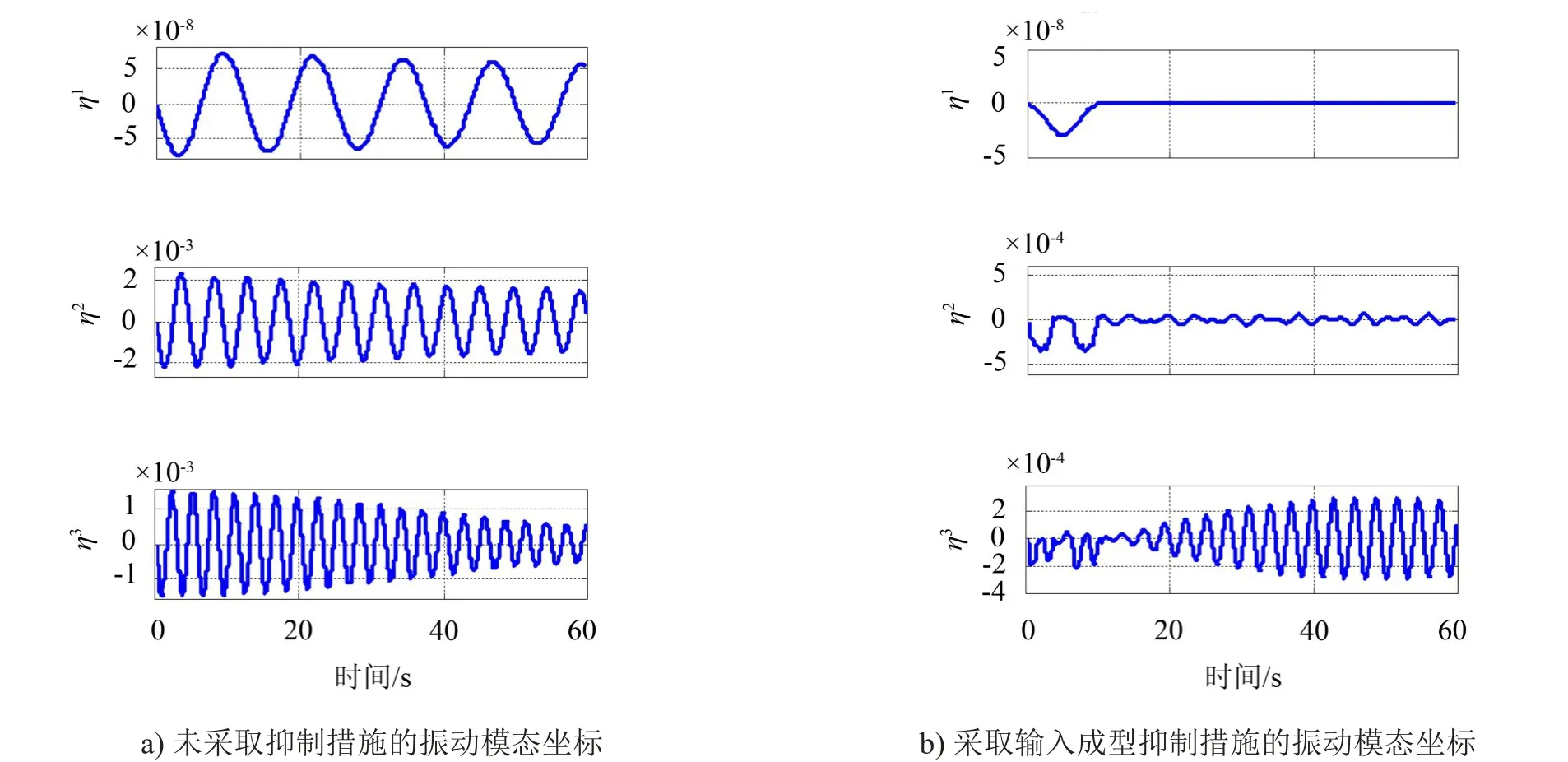
图5 输入成型方法挠性主动振动抑制控制仿真效果
[4]王跃宇,于登云,曲广吉,等.模态综合在遥感卫星颤动相应分析中的应用[J].中国空间科学技术,2000,10(5):48-51.
[5]Takanori Iwata.Attitude dynamics and disturbances of the advanced land observing satellite(ALOS)modeling, identificationandmitigation[C].TakanoriIwata.Astrodynamics specialist conference and exhibit,AIAA-2008-6263,Honolulu Hawaii,2008.
[6]梁小光,陈照波.阻尼器对卫星太阳翼锁定冲击力矩影响的研究[J].噪声与振动控制,2011,31(1):127-130.
[7]张萌,祝晓丽,陆娇娣,等.一种高稳定度太阳帆板驱动机构控制方法[J].空间控制技术与应用,2010,36(4):46-62.
[8]原劲鹏,刘建功,杨雷.步进电机驱动柔性负载的一种振动抑制控制策略[J].空间控制技术与应用,2008,34(6):34-38.
[9]张振华,杨雷,庞世伟.高精度航天器微振动力学环境分析[J].航天器环境工程,2009,26(6):528-534.
[10]胡庆雷,马广富.基于变结构/输入成形的航天器振动抑制方法[J].哈尔滨工业大学学报,2006,38(10):1769-1177.
Analysis of Micro-vibration of a SolarArray Drive Mechanism in a Satellite and the Countermeasure for Suppressing the Vibration
ZHOU Wei-min1,2,ZHANG Zi-long3,SHI Gui-guo3,ZHU Qing-hua3
(1.ShanghaiAcademy of Spaceflight Technology,Shanghai 201109,China; 2.College ofAerospace and Material Engineering,National University of Defense Technology, Changsha 410073,China; 3.ShanghaiAerospace Control Technology Institute,Shanghai 200233,China)
The measurement data and analysis result of the micro-vibration responses of a solar array drive mechanism are given.Then,based on the exact dynamic modeling of the solar array drive system,the influence of the micro-vibration on the attitude of a typical satellite is analyzed.Finally,the integrated measures by using frequency restriction method and active vibration suppression method are proposed,and the corresponding simulation result is given.
vibration and wave;solar array drive mechanism;micro-vibration;frequency distribution;active vibration suppression
V214.3+3
ADOI编码:10.3969/j.issn.1006-1335.2014.02.013
1006-1355(2014)02-0059-04
2013-05-28
周伟敏(1961-),男,研究员,从事卫星总体和控制工程研究,研究方向包括高精度航天器姿态确定与姿态控制等。
E-mail:zhouweimin@163.com
猜你喜欢
宇航计测技术(2021年3期)2021-08-17
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
电子产品世界(2016年1期)2016-03-07
空间控制技术与应用(2015年4期)2015-06-05
空间控制技术与应用(2015年1期)2015-06-05
科技创新导报(2014年11期)2014-11-05
载人航天(2013年5期)2013-09-19
空间控制技术与应用(2009年2期)2009-12-20