欠驱动灵巧手机构设计
2014-09-19 03:42唐新星张楠张习烨周鹏飞
重型机械 2014年6期
唐新星,张楠,张习烨,2,周鹏飞
(1.长春工业大学机电工程学院,吉林长春 130012; 2.长城汽车股份有限公司技术研究院,河北保定 071000)
欠驱动灵巧手机构设计
唐新星1,张楠1,张习烨1,2,周鹏飞1
(1.长春工业大学机电工程学院,吉林长春 130012; 2.长城汽车股份有限公司技术研究院,河北保定 071000)
设计了欠驱动灵巧手的机械结构。在分析人手的特点以及现有欠驱动灵巧手机构设计上存在的缺点,设计了灵巧手机构原理模型,并在此基础上设计了3关节、4自由度的欠驱动机械手结构,包含手指基座传动机构、掌骨关节指段、近掌骨关节指段、远掌骨关节指段,在3个电机驱动下,各关节指段通过腱绳实现运动与力的传递;对机构的运动学进行了分析,并绘出了指间的运动空间;利用ADAMS对动力传动机构、关节转矩进行了仿真,仿真结果表明,手指基座的传动精度较高,且关节在运动过程中力矩变化不大。
欠驱动灵巧手;机构设计;运动学方程;动力学仿真
0 前言
机器人主要应用于对人来说比较危险甚至无法到达的场合,作为人类活动的延续,在工农业生产、太空探索、海洋开发、核工业生产以及国防建设等领域,得到了广泛的应用。欠驱动灵巧手与常见的机器人手相比,拥有驱动少、质量轻、能耗低等优点,在节约能量、降低造价、减轻重量、增强系统灵活性等方面都较完全驱动系统优越[1]。目前,国内外也出现了一些具有代表性的欠驱动机械手,例如,巴瑞特手爪BH8-601,不但能够完成一般的外部包络抓取,其手指还可以伸入物体内部并向外张开,从而实现内部抓取[2]。Southampton机械手,可帮操控者拿起更脆弱的物品而不必担心会将物品弄碎或滑落[3]。清华大学设计的欠驱动拟人机器人手TH-1,电机、驱动与控制系统等完全嵌入手掌,在外观与尺寸上均与人手相似,可完成常见的伸展、握拳和以适当的力稳定地抓取不同尺寸物体等拟人动作[4]。但欠驱动手指通过弹簧和限位元件实现手指的自适应抓握,同时也受弹性元件和限位元件的影响,导致机器人手指的精确控制、轨迹跟踪有一定难度。因此,本文根据人手的生理特点,在总结前人研究工作的基础上,设计了一种基于腱绳传动的欠驱动灵巧手,通过利用欠驱动机构和腱绳传动方案,实现对抓取物的自适应性,使欠驱动五指灵巧手在工作时更像人手,其研究与开发具有十分重要的理论意义和实用价值。
1 欠驱动灵巧手机构设计
1.1 欠驱动灵巧手机构原理
人手是由骨骼、细胞组织、神经等构成,可以认为骨骼是刚体,并通过关节相连。当外物或外力施加在人手上时,肌肉发生变形,通过肌腱控制将力与力矩传递或转变成关节的转动,从而驱动各段指骨运动或者保持某种姿态。从运动方式上来看,人的手指屈曲/前伸和内聚/外展两种动作。远掌骨指关节和近掌骨指关节只能进行屈曲或者前伸,机构上属转动副,只有平面上的转动自由度。掌骨指关节不仅可以做屈曲/前伸运动,还能做内聚/外展运动,机构上属球销副,在空间中拥有两个自由度。因此,人的每根手指在立体坐标系中包含了3个屈曲/前伸的自由度和1个内聚/外展自由度。根据对人手的运动学分析与运动特点研究,灵巧手机构原理模型如图1所示。根据原理模型,每根手指均可看作是由两个转动副连接的三根连杆和一个球销副组成的连杆机构,每个平面连杆机构球销副中的两个转动的轴线相互垂直。
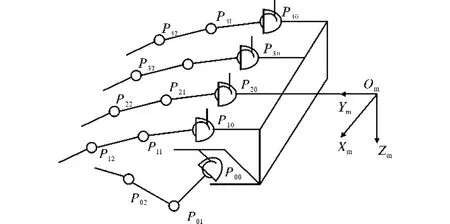
图1 灵巧手机构原理模型Fig.1Underactuated dexterous hand structure model
1.2 欠驱动灵巧手机构设计
在设计手指时,每根手指采用3个电机驱动,以获取手指4个自由度,单指装配示意图如图2所示。其中,1号电机驱动手指掌骨关节进行屈曲/前伸动作;2号电机驱动手指近掌骨关节和远掌骨关节进行屈曲/前伸动作;3号电机驱动手指进行内聚/外伸动作。关节的运动和力,通过定位销上缠绕的腱绳传递。具体驱动过程是1号电机与2号电机的输出轴上安装有直齿圆柱小齿轮Z1,通过与大齿轮Z2的啮合传动,将力传递给蜗杆Z3,而蜗杆又将动力传递给了蜗轮Z4。在蜗轮轴上缠绕有传递运动的腱绳,而腱绳按照一定的次序缠绕在手指各个指节的关节处,最终将腱绳的运动传递给了指段上的三个关节;同时当关节停止运动或电机关机时,由于在机械结构上采用了蜗轮蜗杆,而蜗轮蜗杆在运动上不可逆,使得关节停止运动或电机关机时,手指关节屈曲/前伸的过程中具有自锁性。而3号电机的输出轴端安装了一根螺杆,传动螺母与螺杆相配合,在传动螺母上下两个端面分别安装着控制手指侧摆的两根腱绳。由于螺纹传动也具有运动的不可逆性,使得手指在侧摆时,也拥有了自锁性。

图2 单指装配示意图Fig.2Assembly schematic diagram of single finger
采用腱绳驱动手指关节,具有较大的灵活性,但研究发现,不同的腱绳布置能达到不同的驱动效果。文献[5-6]提及了关节全驱动与关节顺序驱动两种腱绳布置方案。其中,前者不能准确得知各个关节的运动量,且不适于控制系统进行量化的控制,同时这种方法缩小了手指的运动空间,而后者通过在手指关节处增加了限位销,因此手指关节按先后顺序动作,但与人手的真实动作还有差距。实际中,人手近端关节与远端关节运动时的函数关系可近似为1∶1,因此,腱绳布置方法如图3所示。
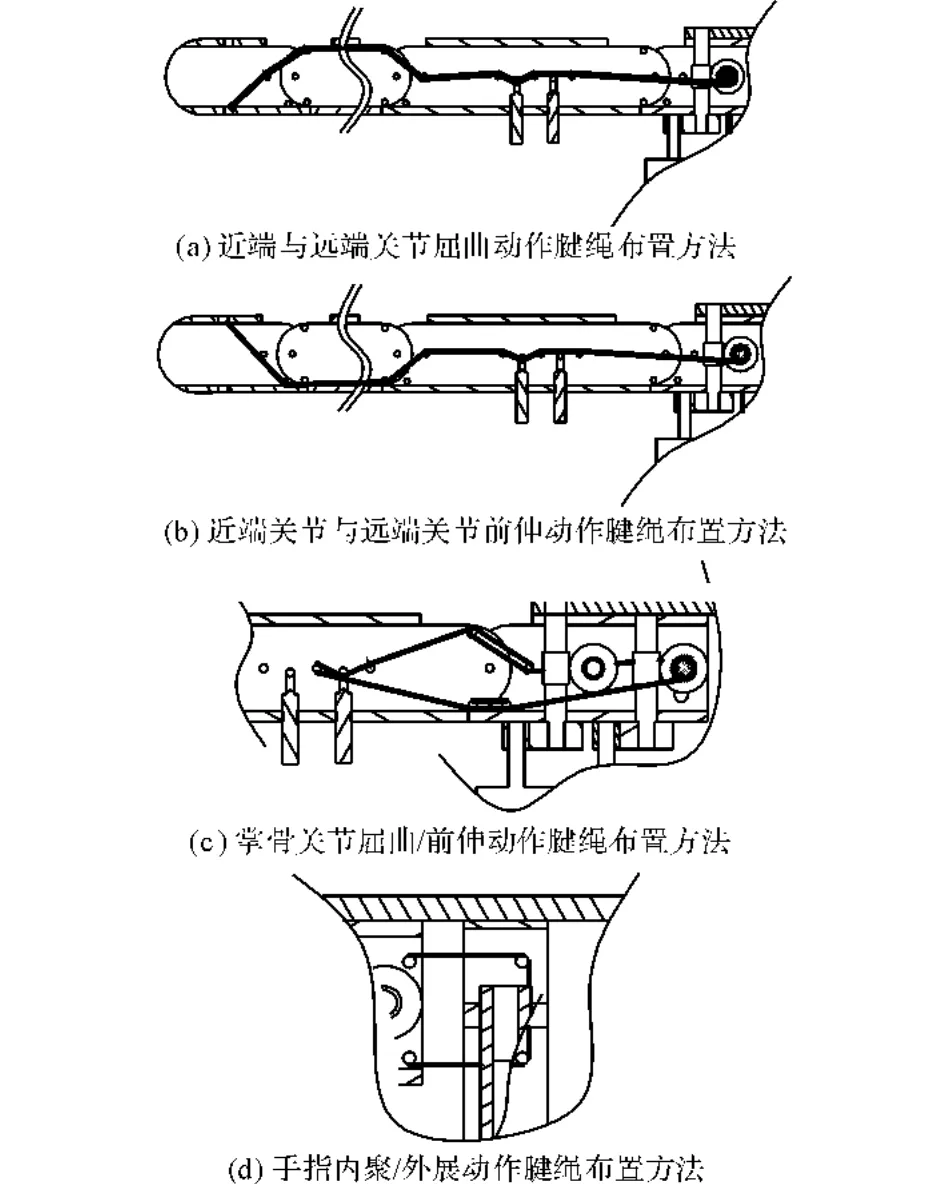
图3 单指腱绳布置方法Fig.3Layout method of single finger rope
图3a、图3b中的两根腱绳由1号电机驱动,同时控制远端关节与近端关节,并且在手指近端指节内部,加入了张紧装置,因此,可方便地调节传动系统腱绳的张紧力;图3c中的两根腱绳由2号电机驱动,用来控制掌骨关节,除了在掌骨关节进行缠绕外,同时又在掌骨关节上方的张紧装置上进行缠绕,便于随时调整腱绳的张紧力;图3d中的两根腱绳由3号电机驱动,用来控制手指的内聚/外展。
腱绳配合定位销的传动方式中,不能忽略腱绳在系统中的伸长变化量,会因传动滞后而增大系统控制误差。为此,使用张紧螺栓与两个定位销配合,组成三角形张紧机构,如4所示。当传动系统需要张紧时,只要拧动张紧螺母,使张紧螺栓在轴向上产生位移,与定位销产生径向错动,形成三角偏心,为腱绳传动系统施加一个张紧力。

图4 张紧螺栓装配示意图Fig.4Assembly schematic diagram of tense bolt
2 欠驱动机械手的运动学与动力学分析
2.1 欠驱动机械手的运动学分析
采用D-H方法建立灵巧手的坐标系,其基本原则是为每一个关节指定一个参考坐标系,z轴为旋转关节轴线,x轴方向指向zn-1与zn之间的公垂线,对于与z轴相交的相邻两关节,x轴定义为两条轴线构成的平面的垂线[7]。据此建立如图5所示的仿人灵巧手坐标系。
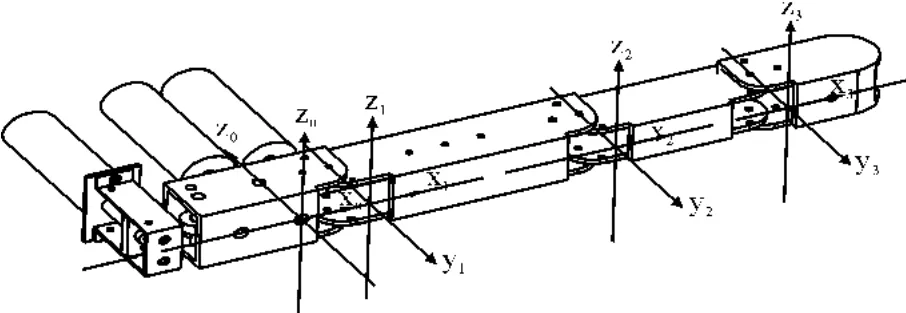
图5 单指坐标系Fig.5A single finger coordinate
每个关节的变换矩阵Ai定义为(其中下标i代表关节数,i=1,2,3,4,cθi代表cosθi,sθi代表sinθi)。

单指的正运动学正解是相邻关节之间的4个变化矩阵的乘积。根据运动学正解方程,通过MatLab Robotics Toolbox工具箱创建机器人模型,并绘制出的单指模型,如图6所示。

图6 单指关节运动空间示意图Fig.6Working space schematic diagrum for singler joints
2.2 欠驱动机械手传动机构的动力学分析
电机输出的扭矩,经一组齿轮副和一组蜗轮副的传递后,已经发生很大的变化。由图1可知,传动系统的传动比为

传动比可以根据公式(2)可以计算出来:
经计算,蜗轮轴可提供的扭矩T4=8.82 N ·m。
传动系统用ADAMS对进行仿真验证,使用ADAMS对传动系统进行建模,如图7所示。电机放置在图7中小齿轮Z1处,设置仿真时间长度为5 s。

图7 传动系统建模Fig.7Transmission system model
通过设置角度传感器,仿真后可以测量出Z1与Z4的旋转角度,测量结果如图8所示。
由图8可知,小齿轮在5 s时间内旋转了150°,而蜗轮则旋转了2.506°。根据获得的仿真结果可以计算出,i14=v1/v4=59.85,与之前计算的传动比基本相同。
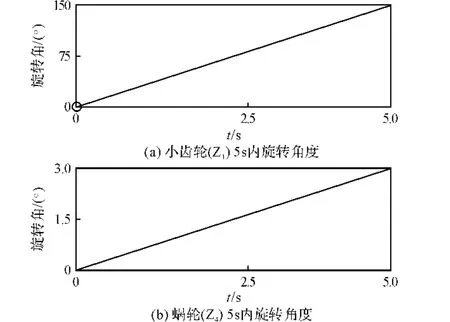
图8 小齿轮与蜗轮5 s内旋转角度Fig.8Rotation angle of gear and turbine within 5s
对手指模型在ADAMS环境下进行仿真,并通过在手指关节处设置扭矩传感器,测量关节处随着角度变化所承受的扭矩,仅以掌骨关节为例,结果如图9所示,可明显看出在手指关节角度从初始状态0°开始变化时,手指关节承受力矩在x轴与y轴方向上有突变,z轴方向上变化不大。

图9 关节转动扭矩仿真结果Fig.9Simulation result of joint rotary torque
3 结束语
本文对欠驱动机械手进行了系统的研究,构思设计了一种多自由度欠驱动手指机械系统,对其进行理论分析。首先,根据人手远掌骨关节和近掌骨关节在运动时的特点,建立了人手运动模型简图;其次,设计出欠驱动五指灵巧手的机械结构,给出了腱绳缠绕及腱绳张紧的方法;最后,并对机械手的运动学与动力学建模过程进行了推导,使用ADAMS对手指基座的传动精度设计、关节的动力学进行了仿真,仿真结果表明,在关节初始运动时承受较大的力矩,但在整个运动过程中力矩变化不大。
[1]M.T.Mason J.K.Salisbury.Robot Hands and the Mechanics of Manipulation[M].Cambridge.USA:MIT Press,1985.
[2]http://www.barrett.com/robot/whatsnew/barr/barrfram.htm.
[3]Kyberd PJ,Chappell PH.The Southampton Hand:an intelligent myoelectric prosthesis[J].Journal of Rehabilitation Research and Development,1994,31(4): 326-334.
[4]张文增,陈强,孙振国,等.变抓取力的欠驱动拟人机器人手[J].清华大学学报(自然科学版),2003,43(8):1143-1147.
[5]张习烨.欠驱动五指灵巧手机构设计及控制系统研究[D].长春:长春工业大学,2014.
[6]唐新星,张习烨,白冰,等.欠驱动五指机械手[P].中国专利:201320105153.3,2013,6.
[7]李泽相.机器人操作的数学导论[M].北京:机械工业出版社,1998.
Mechanism design of underactuated dexterous hand
TANG Xin-xing1,ZHANG Nan1,ZHANG Xi-ye1,2,ZHOU Peng-fei1
(1.School of Mechatronic Engineering,Changchun University of Technology,Changchun 130012,China; 2.Technology Institute of Great Wall Motor Company,Baoding 071000,China)
In this paper,mechanism of underactuated dexterous hand is designed.Based on analyzing the characteristics of the hand and shortcomings of existing underactuated dexterous hand,model of underactuated dexterous hand structure is established,the mechanism,with three joints and four degrees of freedom,which includes transmission mechanism of finger pedestal,digital segments of metacarpal joint,digital segments of proximal metacarpal joint,digital segments of distal metacarpal joint,is designed.Driven by three motors,every digital segments of metacarpal joint implement transmission of motion and force by its ropes.The motion space of fingers is drawn according to kinematics analysis,the transmission mechanism and the joint torque are simulated by using ADAMS,the simulation results shows that the mechanism has higher transmission precision and the joint torque hardly changes in the process of movement.
underactuated dexterous hand;mechanism design;kinematics equation;dynamics simulation
TP24
A
1001-196X(2014)06-0009-05
2014-08-01;
2014-08-26
教育部博士点基金资助项目(20110061120033);
吉林省自然科学基金资助项目(201115153);
国家级大学生创新创业训练计划项目(201210190001)
唐新星(1975-),男,长春工业大学讲师,博士,主要从事工程机器人、图像处理、视觉仿生研究。
实验研究
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
健康护理(2022年3期)2022-05-26
世界最新医学信息文摘(2020年73期)2020-12-27
装备制造技术(2020年4期)2020-12-25
物流技术与应用(2020年4期)2020-05-06
电子制作(2019年13期)2020-01-14
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年4期)2017-06-22