基于ANSYSWorkbench的牛头刨床机构刚柔耦合动力学仿真分析
2014-09-26 09:23赵玉成顿文涛谷小青马斌强
河南农业大学学报 2014年5期
李 勉, 赵玉成, 顿文涛, 蔡 镔, 谷小青, 马斌强, 袁 超
(1.河南农业大学,河南 郑州 450002; 2.河南省农业机械试验鉴定站,河南 郑州 450008)
基于ANSYSWorkbench的牛头刨床机构刚柔耦合动力学仿真分析
李 勉1, 赵玉成2, 顿文涛1, 蔡 镔1, 谷小青1, 马斌强1, 袁 超1
(1.河南农业大学,河南 郑州 450002; 2.河南省农业机械试验鉴定站,河南 郑州 450008)
应用ANSYS Workbench软件中的Transient Structural模块对牛头刨床机构进行了刚柔耦合动力学分析,得到了将导杆和连杆作为柔性体的刨床机构的运动特征曲线和切削阻力作用下的导杆与连杆的最大应力随时间变化的曲线.这种方法实现了在同一软件平台中进行刚柔耦合机械系统的运动学分析和动力学分析.
刚柔耦合;动力学仿真;牛头刨床;ANSYS Workbench
Rigid-flexiblecouplingdynamicssimulationofdrivingmechanism
机械系统中构件的刚度对机械运动的影响是一个不可忽略的因素[1].通常情况下,把机械系统中的构件当作刚性体来处理,在某种程度上可以满足设计要求.但在机械系统的运动过程中,有时需要考虑构件的变形以及构件内部的应力应变分布情况,这时必须把机械系统中的部分构件作为柔性体来处理,这样才能反映机械系统的真实运动情况.当前机械系统的刚柔耦合分析普遍采用ANSYS软件和ADAMS软件的联合仿真[2~8],该方法需要创建柔性体的模态中性文件,通过ANSYS软件和ADAMS软件的双向数据交换来完成机械系统的刚柔耦合动力学分析.随着计算机技术的不断发展,ANSYS软件的功能也不断完善和增强,机械系统的刚柔耦合动力学分析可以在ANSYS Workbench软件的Transient Structural模块中实现.本研究基于ANSYS Workbench软件平台,以某牛头刨床机构为例进行刚柔耦合动力学仿真分析,得到了将导杆和连杆作为柔性体的刨床机构的运动特征曲线和切削阻力作用下的导杆与连杆的最大应力随时间变化的曲线.这种方法可以在同一平台界面下对刚柔耦合机械系统进行运动学分析和动力学分析,使工程技术人员只需掌握一种软件即可完成分析,大大提高了工作效率.
1 牛头刨床机构
图1所示为某牛头刨床机构简图,各构件尺寸为:曲柄1LAB=108 mm,导杆3LCD=620 mm,连杆4LDE=300 mm,机架LAC=350 mm,LEC=635 mm.其中,曲柄1为原动件,其动力由电机提供并通过齿轮传递过来[9,10].
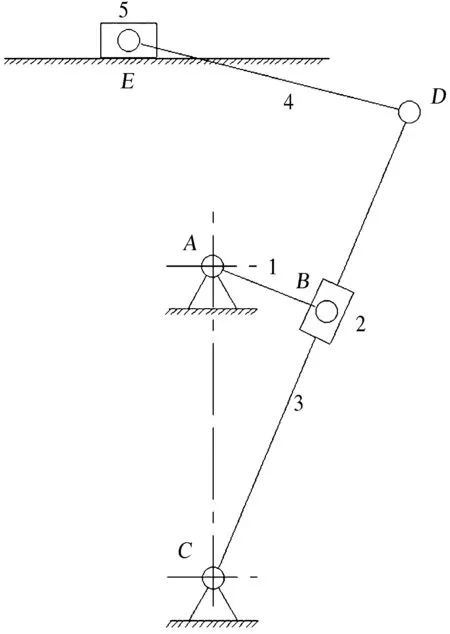
图1 牛头刨床机构Fig.1 The kinematic sketch of drivingmechanism of a shaper
2 牛头刨床机构的建模
2.1模型的建立
通过ANSYS Workbench软件与Pro/E软件的无缝连接,利用Pro/E软件的实体造型和虚拟装配功能,首先在零件模式下对牛头刨床机构的各构件进行建模,接着在装配模式下对各构件进行虚拟装配,建立牛头刨床机构的三维模型,然后无缝导入ANSYS Workbench软件中,建立牛头刨床机构的有限元模型(图2).
2.2材料属性的设置
在ANSYS Workbench软件中,有限元模型建立之后,要跟所做的分析项目进行关联,并在其中根据各构件材料对相应的材料属性进行设置.本研究利用ANSYS Workbench软件中的Transient Structural模块对牛头刨床机构进行刚柔耦合动力学分析,需在有限元模型与Transient Structural模块之间建立关联,并在Engineering Data中设置材料的密度为7 850 kg·m-3,弹性模量为200 GPa,泊松比为0.3.

1.传动轮;2.滑块;3.导杆;4.连杆;5.滑枕;6.床身.
1.Driving wheel;2.Slider;3.Guide-bar;4.Connecting rod;5.Ram;6.Frame.
图2牛头刨床机构的有限元模型
Fig.2Thefiniteelementmodelofdrivingmechanismofashaper
2.3运动关节的建立
在牛头刨床机构的有限元模型中,各构件之间需要通过运动关节(Joint)进行连接.在Transient Structural模块中建立各构件之间的运动关节连接方式时,需利用软件对机构的自由度进行计算,并检查是否有冗余约束的产生,根据机构的自由度和冗余约束的检查结果,选择合适的运动关节连接方式:Joint A采用Body-Ground中的Cylindrical连接,Joint B采用Body-Body中的Spherical连接,Joint C采用Body-Ground中的Revolute连接,Joint D采用Body-Body中的Cylindrical连接,Joint E采用Body-Body中的Spherical连接,滑枕与床身之间的连接和滑块与导杆之间的连接均定义为Body-Body中的Translational连接.另外,还要注意局部坐标系的坐标轴的设置,保证构件的运动情况与未约束的自由度相符.
3 牛头刨床机构的刚柔耦合动力学仿真分析
将牛头刨床机构的有限元模型中的导杆和连杆设置为柔性体,其余均设置为刚体,并进行网格划分.在Joint A上添加Joint Load,大小为2.0 rad·s-1;定义仿真分析的时间为3.14 s,最小时间步为0.000 1 s.应用ANSYS Workbench软件中的Transient Structural模块对牛头刨床机构进行刚柔耦合动力学仿真分析.
3.1运动学仿真结果分析
对牛头刨床机构进行刚柔耦合运动学仿真分析,得到滑枕的运动特征曲线,从而得到牛头刨床的运动规律.滑枕的运动特征曲线如图3~图5所示.图3为滑枕的位置随时间变化的曲线,滑枕在1.86 s处运动到最大位置,接着开始返回,其运动的最大位移,即行程为0.382 m.图4为滑枕的速度随时间变化的曲线,在工作过程中,滑枕在0.92 s处达到最大速度0.292 m·s-1,在返回过程中,滑枕在2.52 s处达到最大速度0.553 m·s-1.

图3 滑枕的位置随时间变化曲线Fig.3 Position-time graph of the ram
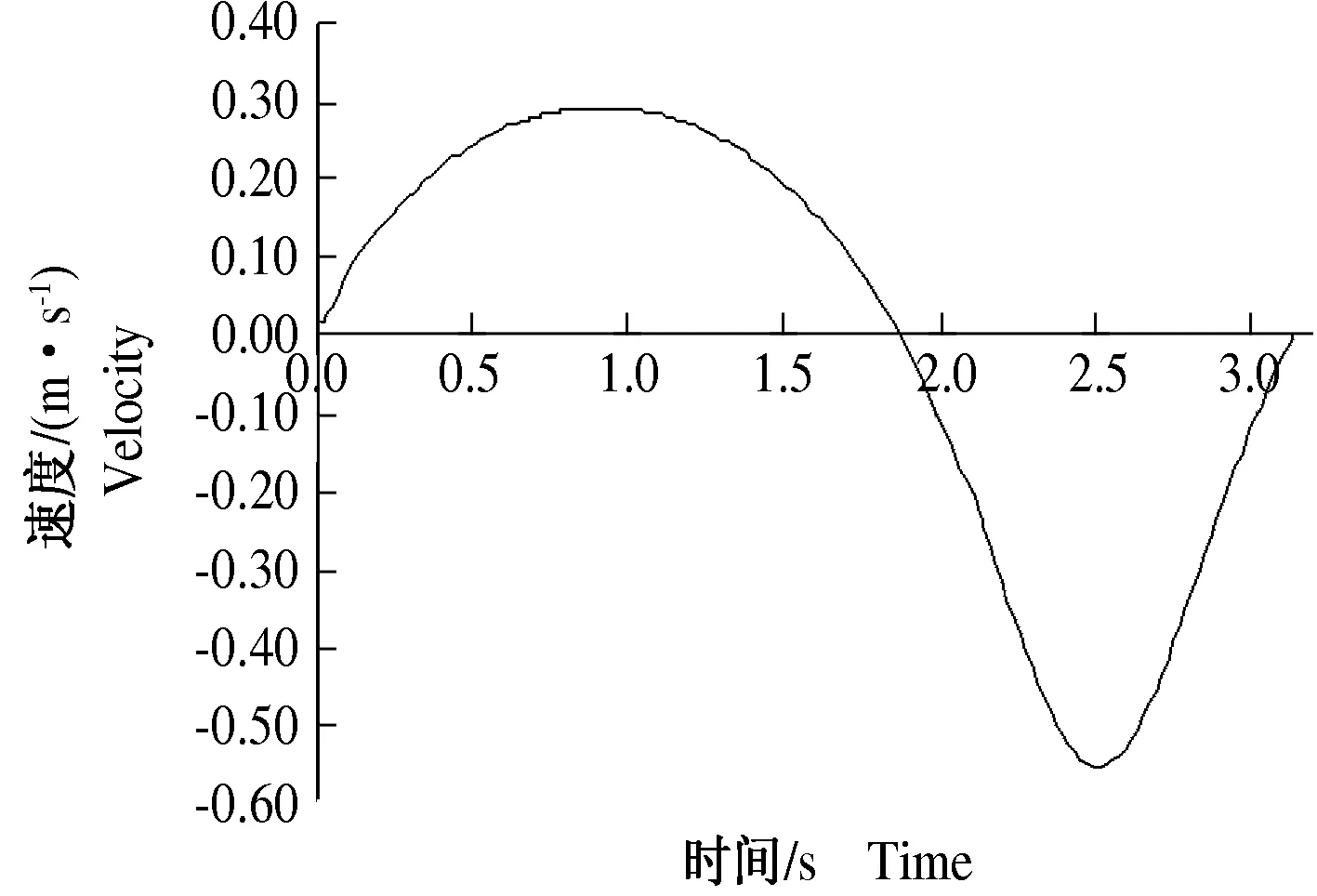
图4 滑枕的速度随时间变化曲线Fig.4 Velocity-time graph of the ram
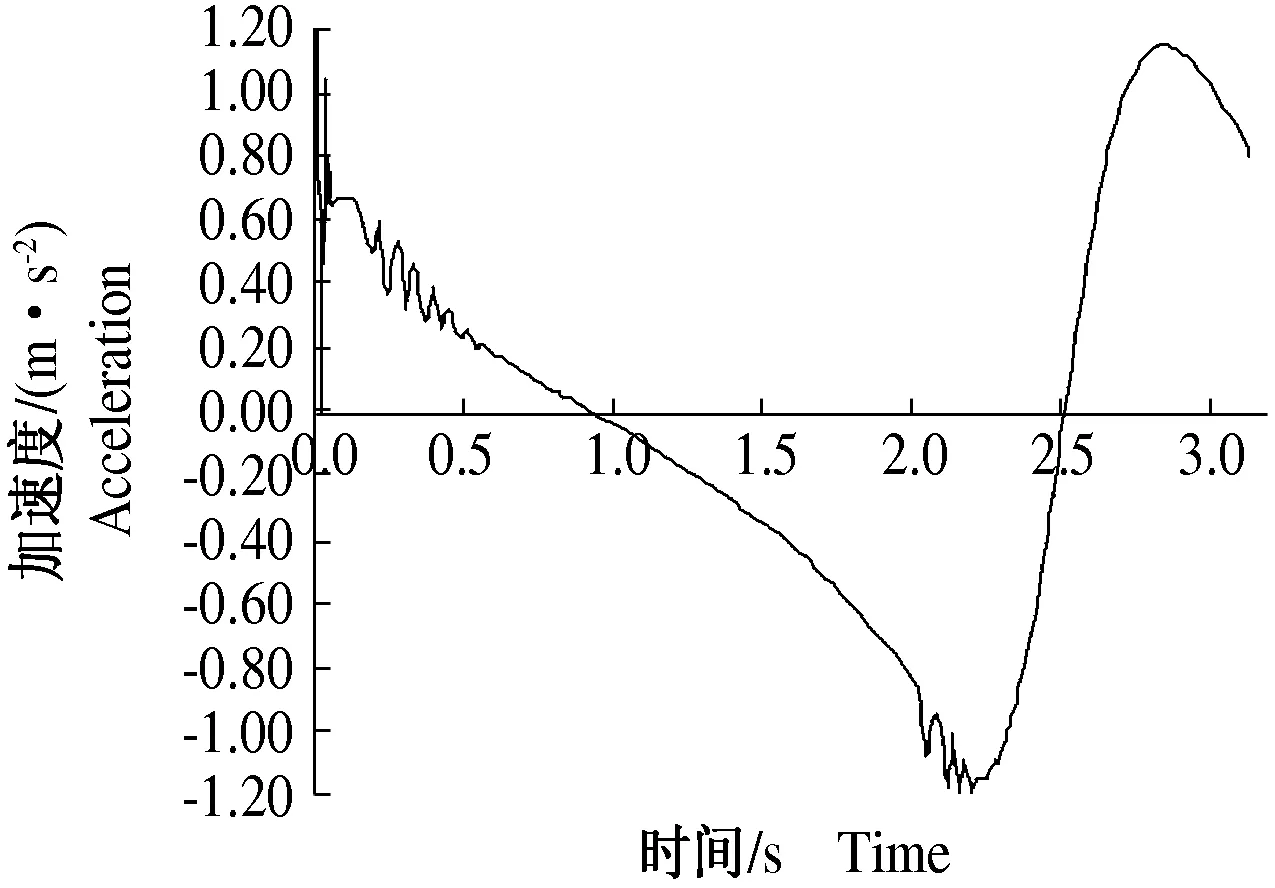
图5 滑枕的加速度随时间变化曲线Fig.5 Acceleration-time graph of the ram
图5为滑枕的加速度随时间变化的曲线,滑枕的加速度在开始运动的最初0.5 s内和运动到最大位置后开始返回的最初0.5 s内出现波动的现象.
3.2动力学仿真结果分析
牛头刨床在工作过程中受到的切削阻力为500 N,在Transient Structural模块中对牛头刨床机构进行刚柔耦合动力学仿真分析时,切削阻力采用Remote Force定义,作用时间为0.2~1.6 s.经过仿真分析,得到导杆和连杆在运动过程中的最大应力的变化曲线.图6所示为导杆在运动过程中的最大应力随时间变化的曲线,在0.25 s处最大应力出现峰值5.928×107Pa,此时牛头刨床刚受到切削阻力的作用,即切削开始;在1.60 s处最大应力又一次出现峰值5.686×107Pa,此时牛头刨床所受到的切削阻力刚变为零,即切削结束.图7所示为连杆在运动过程中的最大应力随时间变化的曲线,在0.25 s处最大应力达到最大值5.087×106Pa,在0.31 s之后略有减小,整个工作过程中连杆的最大应力变化不大.

图6 导杆的最大应力随时间变化曲线Fig.6 Stress-time curve of the maximumstress of the guide-bar

图7 连杆的最大应力随时间变化曲线Fig.7 Stress-time curve of the maximumstress of the connecting rod
4 结语
借助ANSYS Workbench软件的Transient Structural模块对某一牛头刨床机构进行刚柔耦合动力学仿真分析,在分析中将牛头刨床机构的导杆和连杆作为柔性体处理,不仅得到了牛头刨床机构的运动规律,而且还得到了在切削阻力的作用下,导杆和连杆在运动过程中最大应力随时间的变化情况.利用这种方法对机械系统进行刚柔耦合动力学分析,避免了分析数据在不同分析软件之间相互交换,实现在同一平台界面下完成刚柔耦合机械系统的运动学分析和动力学分析.
[1] 张 雷,余克龙,陈少钟,等.基于ANSYS和ADAMS空间四连杆引纬机构的柔性动力学仿真[J].纺织学报,2013,34(5):116-120.
[2] 于 涛,李亭亭.基于ADAMS的曲柄滑块压力机刚柔耦合模型的动态仿真分析[J].机械传动,2012,36(3):64-66.
[3] 彭礼辉,李 光.ADAMS和ANSYS对机构的联合仿真分析[J].湖南工业大学学报,2012,26(2):43-48.
[4] 刘言松,曹巨江,张元莹.刚柔耦合机械系统动力学仿真[J].陕西科技大学学报,2006,24(3):74-76.
[5] 侯红玲,赵永强.基于ADAMS和ANSYS的构件运动分析[J].机械设计与制造,2010(5):75-77.
[6] 张永德,汪洋涛,王沫楠,等.基于ANSYS与ADAMS的柔性体联合仿真[J].系统仿真学报,2008,20(17):4501-4504.
[7] 张 朋,欧阳林子.Pro/E、ADAMS和ANSYS之间数据交换方法[J].机床与液压,2010,38 (6):110-112.
[8] 赵丽娟,马永志.刚柔耦合系统建模与仿真关键技术研究[J].计算机工程与应用,2010,46 (2):243-248.
[9] 綦耀光,刘 峰.机械设计基础[M].东营:中国石油大学出版社,2006.
[10] 赵玉成,李 勉,顿文涛,等.基于Pro/E的牛头刨床六杆机构的动态仿真分析[J].河南农业大学学报,2014,48(1):66-70.
(责任编辑:蒋国良)
ofashaperbasedonANSYSWorkbenchLI Mian1,
ZHAO Yu-cheng2, DUN Wen-tao1, CAI Bin1, GU Xiao-qing1, MA Bin-qiang1, YUAN Chao1
(1.Henan Agricultural University, Zhengzhou 450002, China; 2.Henan Agricultural Mechanical Test Appraisal Station, Zhengzhou 450008, China)
The rigid-flexible coupling dynamics simulation of driving mechanism of a shaper is conducted by means of the transient structural module of ANSYS Workbench software in the paper. In the process of the FEM calculation, the guide-bar and the connecting rod are set as flexible bodies. As the results, the curves of kinetic feature of the shaper is obtained, so are the curves of maximum stress over time, showing the maximum stress of the guide-bar and the connecting rod under the action of cutting resistance. By this means, the dynamics simulation of a rigid-flexible coupling mechanical system can be solved with the same software.
rigid-flexible coupling; dynamics simulation; shaper;ANSYS Workbench
TH132
:A
2014-02-06
河南省科技厅科技攻关计划项目 (112102210212)
李 勉,1979年生,男,河南南阳人,讲师,从事信息技术方面的研究.
马斌强,1979年生,男,河南灵宝人,实验师;袁 超,1961年生,男,河南开封人,副教授.
1000-2340(2014)05-0623-03
猜你喜欢
橡塑技术与装备(2022年7期)2022-07-06
机械设计与制造工程(2022年1期)2022-02-19
模具制造(2019年10期)2020-01-06
制造技术与机床(2018年7期)2018-08-13
华北理工大学学报(自然科学版)(2017年4期)2017-11-29
制造技术与机床(2017年8期)2017-11-27
浙江大学学报(工学版)(2016年2期)2016-06-05
现代工业经济和信息化(2016年5期)2016-05-17
科技资讯(2015年7期)2015-07-02
制造技术与机床(2015年10期)2015-04-09