
基于MATLAB的井下碎石车垂直工作范围求解
2014-10-10 09:45耿晓光李叶林王顺凯
制造业自动化 2014年14期
耿晓光,李叶林,马 威,王顺凯
GENG Xiao-guang,LI Ye-lin,MA Wei,WANG Shun-kai
(北京科技大学 机械工程学院,北京 100083)
0 引言
井下碎石车以其安全性好、效率高、成本低等优点已取代爆破法和人工大锤法而成为井下矿山开采二次破碎的重要设备。其一次定位的工作范围(一般指垂直破碎范围)作为一个重要的参数和技术指标,对实际作业有很强的指导意义,能够有效的提高工作效率和质量,所以对它的研究很有必要。
碎石车的机械臂是一种开环的空间多连杆机构,由一系列连杆通过转动关节串联而成,通过连杆的配合动作使破碎锤钎杆达到不同的空间位姿。本文通过理论分析,并借助MATLAB软件编程实现曲线的绘制,得到正确的工作范围,给碎石车的作业带来指导,给其他相关方面的研究提供了思路和想法。
1 机械臂结构
使用SolidWorks软件对机械臂进行三维建模,其结构如图1所示。各构件之间全部采用铰接连接,在液压缸的作用下各部件绕铰接点摆动。
2 简化模型和几何分析
分析之前需要对原有的三维模型进行简化,将机械臂的各个部分视为杆件,通过关节相连,在油缸的作用下实现动作。进而进行几何分析,找到在油缸安装距确定的情况下,机械臂摆动角度随油缸行程变化的对应关系。
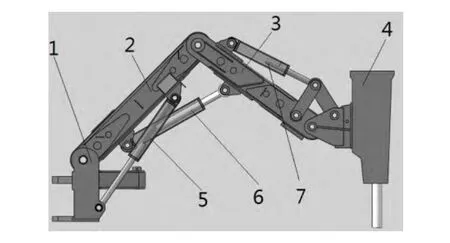
图1 机械臂结构
1)内臂部分
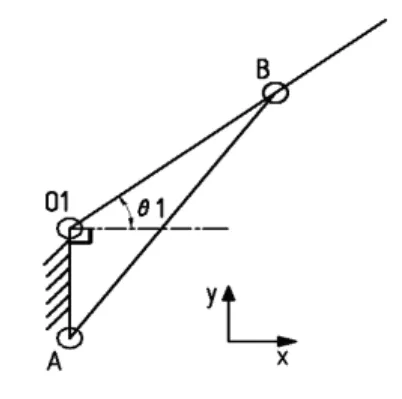
图2 内臂机构简图

图3 外臂机构简图
内臂的机构简图如图2所示,其中A、B为举臂油缸的两个铰接点,O1为内臂的转轴。在△AO1B中由余弦定理可求得:

内臂转角θ1(相对于水平面)可求:
除了油缸长度LAB和内臂转角θ1,其他都是已知量,且为定值,这样就得到了两者的一一对应关系。
2)外臂部分
外臂的机构简图如图3所示,C、D分别为折叠油缸的两个铰接点,O2为外臂的转轴。同内臂的求解方法:

内臂转角θ2=π− ∠C O2D 。
3)破碎锤部分

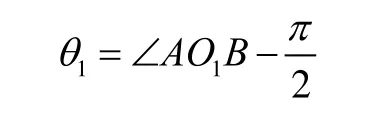
图4 破碎锤机构简图1
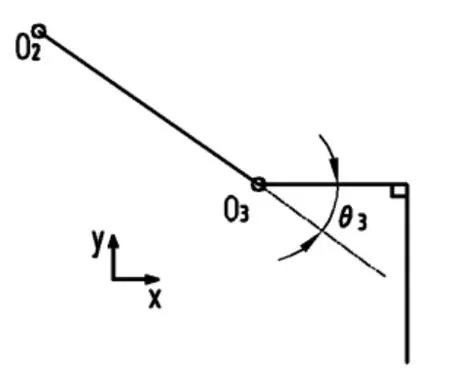
图5 破碎锤机构简图2
破碎锤部分的结构简图如图4所示,其中E、F为转锤油缸的两个铰接点,O3为转锤的转轴,此处,油缸通过四连杆机构间接作用于转锤,而FG相当于四连杆机构的摇杆。在△FEG中由余弦定理可求得:

此处结构继续进行简化,如图5所示。
θ3为破碎锤转角,可由∠FEG间接求得。此处采用四连杆机构起到运动放大和防干涉作用。
通过以上分析,得到了油缸行程和各机械臂转角的对应关系。只要确定油缸安装距和行程等尺寸参数就可以计算出机械臂各关节的转角范围,为后续应用D-H法求解正向运动学方程打好了基础。
3 建立运动学方程
碎石车机械臂是一种典型的多关节机器手臂,其工作范围即破碎锤钎杆所能达到的范围,此处采用机器人D-H法可以很好的解决。
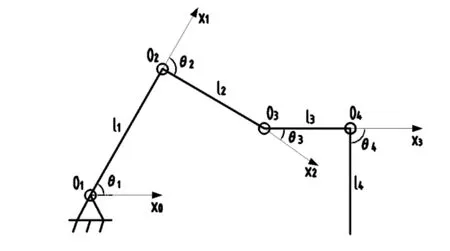
图6 机械臂的参考坐标系线图
首先,如图6所示,根据D-H法将机械臂简化为连杆和关节模型,并确定各个关节的参考坐标系。由于各杆件均在一个平面内,z轴均垂直于纸面且平行,所以距离d和角α均为0,θ是杆件绕z轴旋转的角度(即各臂的转角,且顺时针为负,逆时针为正),l表示各臂的长度。其中θ1、θ2、θ3已经分析求得,为定值,各参数如表1所示。

表1 D-H参数表
为求出碎石车垂直工作范围,θ1和θ2可在各自范围内任意取值,θ3不仅需在范围内取值外,还需要和θ1、θ2满足一定的关系:θ3=-θ1-θ2。从而保证l3始终保持水平(θ4=-90o,l4即可保持竖直)。
然后,从基座到第一关节,再从第一关节到第二关节直至到最后一个关节进行坐标的变换,如此下去就得到了破碎锤钎杆相对于基坐标系的位置和姿态。
变换矩阵可表示为:

其中s θ表示sin θ,c θ表示cos θ。
因此,破碎锤钎杆相对于底座的位置变换矩阵为:

式 中 cθ23= cos(θ2+θ3),sθ23= sin(θ2+ θ3),θ234= θ2+ θ3+ θ4,其余类推。
矩阵 T40最后一列即为破碎锤钎杆的位置坐标,且已知z=0,故有:
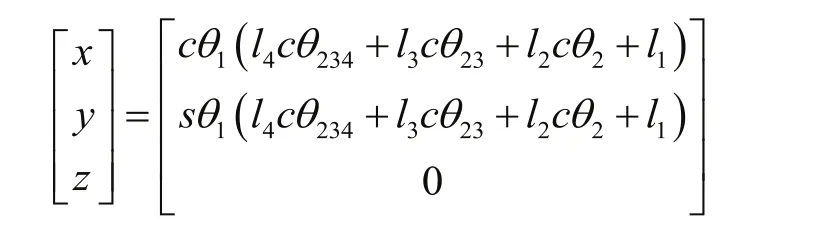
因为l1、l2、l3和l4均为已知,所以问题就转化为破碎锤钎杆位置坐标和机械臂摆角的对应函数关系,下面借助MATLAB软件即可实现求解,并且输出工作范围曲线。
4 MATLAB绘制工作范围
根据上述由D-H法建立的正向运动学方程,通过MATLAB编程实现,即可绘制出破碎车的工作范围,如图7所示。
5 结论
1)通过MATLAB软件仿真得到工作范围,对井下实际的生产作业有很好的指导价值。
2)这种方法简便易懂,对于正向运动学问题的解决有较高的可靠性和可操作性。

图7 碎石车垂直工作范围
3)工作范围的求解可以反过来指导破碎车机械臂的设计。
[1]刘泽鑫,管会生.凿岩台车钻臂工作空间求解[J].机械,2012(5).
[2]赵强,吴洪涛,朱剑英.车载起重机械吊臂工作范围的研究[J].机械科学与技术,2005,12:1460-1462-1506.
[3]赵亮亮,马振书,杜峰坡.基于ADAMS的危险作业机械手工作轨迹分析[J].机械与电子,2011(1),44-47.
[4]周芳芳,樊晓平,叶榛.D-H参数表生成三维机器人模型仿真系统[J].系统仿真学报,2006,04:947-950.
[5]孙祥,徐流美,吴清.MATLAB7_0基础教程[M].北京:清华大学出版社,2005.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
河北省科学院学报(2020年1期)2020-05-25
模具制造(2019年10期)2020-01-06
重型机械(2019年3期)2019-08-27
中国新技术新产品(2016年21期)2016-12-08
中国设备工程(2015年2期)2015-12-27
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
海军航空大学学报(2015年1期)2015-11-11
汽车零部件(2014年5期)2014-11-11
