Improved fast alignment method of strapdown INS using bidirectional processes and denoising
2014-10-21 01:13QINFangjunLIAnXUJiangning
中国惯性技术学报 2014年4期
QIN Fang-jun, LI An, XU Jiang-ning
(Electrical Engineering College, Naval University of Engineering, Wuhan 430033, China)
Improved fast alignment method of strapdown INS using bidirectional processes and denoising
QIN Fang-jun, LI An, XU Jiang-ning
(Electrical Engineering College, Naval University of Engineering, Wuhan 430033, China)
To solve fast alignment problem for strapdown inertial navigation system(INS), an improved alignment method is proposed using bidirectional processes and inertial sensors denoising. It is proved that repeatedly making use of the bidirectional processes(forward and backward ) to process the saved inertial measurement unit(IMU) data sequence could help fast alignment. A new relationship between forward and backward processes for alignment is deviated. In order to reduce the effect of angular random walk error, a wavelet-based demoising method is adopted to suppress the noises of fiber optical gyroscopes(FOGs) and accelerometers. And the whole procedure of the improved method based on gyrocompassing loop is given. The fast alignment method has been tested on a self-made FOG strapdown INS. The experiment results show that the improved method has great advantage in alignment speed, which costs less than 3 min to complete the alignment mission, and also has higher alignment accuracy after offline denoising the inertial sensors.
strapdown; INS; alignment; bidirectional processes; denoising
Strapdown inertial navigation system(INS) necessitates an alignment stage to determine the initial attitudes before the navigation operation, which is of vital importance in Strapdown INS, because the performance of INS is largely determined by the accuracy and rapidness of the alignment[1-5]. Poor initial alignment accuracy will end up with poor navigation accuracy[2]. While under usual circumstances the speed of alignment contradict with the accuracy[4]. To address the alignment problem, two categories of alignment methods are mainly used i.e. gyrocompassing alignment method and state estimation method[6-13]. The classic gyrocompassing alignment method can achieve fast alignment(about 10 min)[13-16]. But it can’t estimate the biases of gyroscopes or accelerometers, neither eliminate effect of noise from the inertial sensors. State estimation method[9-10,12-13], such as Kalman filter, extended Kalman filter and Unscented Kalman Filter, can estimate the biases, and online eliminate effect of noise. But during a short time, state estimations can’t converge[2,10]. If the filters are not designed reasonably, they even get diverged.
Authors[6]have proposed a smart method for rapid alignment by using the saved IMU data sequences forward and backward repeatedly to obtain initial attitude matrix. The main procedure of the method is to save all the outputs of gyroscopes and accelerometers firstly when the navigation computer calculates forward in normal manner, and repeat the calculation starting from the end of the data sequence in backward process. This method can be regarded as the third kind of alignment method(we call this idea as “bidirectional processes” in this paper). Kalman filter is also applied in [6] to correct error of gyroscopes and accelerometers in inertial frame.
After careful study, we find that the relationship between bidirectional processes(formulas in “Backward Process for Strapdown INS Velocity” part[6]) is incomepletely rigorous, which is only an approximation in the low dynamic conditions during a short time. Then the general equations of backward process are further modified in the paper, and a new relationship between forward and backward processes is presented. Considering our goal is to design a very fast alignment method with reasonable accuracy, and the facts that biases can’t be estimated correctly online in a short time(except for bias of north gyroscope) by Kalman filter[5,8-9],we propose an improved gyrocompassing alignment method hybridized by bidirectional processes in this paper to achieve fast alignment. Unlike Kalman filter, conventional gyrocompassing alignment method can’t eliminate effect of noise of gyroscopes or accelerometers, which is harmful for alignment accuracy. Specially the angle random walk error of FOG deteriorates the azimuth accuracy[16]. To achieve high accuracy alignment, some kind of denoising method should be applied. Wavelet transform has an important ability to perform local analysis for all kinds of signals, specially for offline data, so it had been utilized to process signals of FOGs[17-20]. Reference [17] proposed a wavelet de-noising method for alignment, which was applied on a navigational grade inertial measurement unit(LTN90-100). Results showed that accurate alignment procedure and fast convergence of the estimation algorithm could be obtained. Wavelet together with Allan variance was use to model inertial sensor stochastic error in [18]. It is urgent to eliminate uncertain disturbances from outputs of sensors in application environments. So the adaptive fuzzy-wavelet method[13]is adopted to reduce noise of inertial sensors offline during bidirectional processes in this paper.
The new alignment method using bidirectional processes and inertial sensors denoising has been tested on our self-made FOG Strapdown INS. From the results of experiments, we find that the proposed alignment method has the same accuracy of pitch and roll compared with conventional method. While the former has great advantage over the alignment speed, which costs only about 3 minutes to complete the alignment mission, and also has better performance on yaw accuracy after offline denoising of inertial sensors.
1 Problem statement
In Fig.1, Ayis north acceleration of vehicle,Δ Ayis bias of north accelerometer,V˙yis north acceleration calculated by INS, Vyis north velocity, εxis east gyroscope drift, φ0is initial angle error, R is radius of the earth, g is acceleration of gravity, φxis angle error around east axis,1/sis integral operator.
Recent years the capability of the computer and flash memory rapidly expands. So the navigation computer can save IMU data and process them immediately[6]. Bidirectional processes utilize the saved IMU data sufficiently in the forward and backward process, and make rapid alignment possible, as shown in Fig.1.
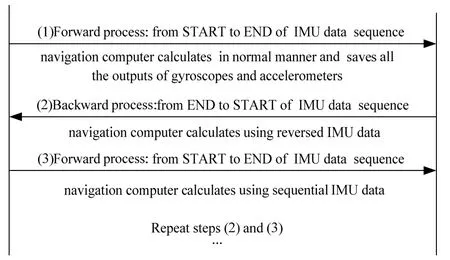
Fig.1 Flow chart for bidirectional processes proposed by Reference [6]
Reference [6] has proposed a set of formulas for backward process to calculate both attitude and velocity. In this paper we point out that the equations for the velocity calculation are only approximations to some extent and can be further improved.
For the convenience of the reader, “equations (28)(31)(30) and (33)” in [6] are rewritten as (1)-(4) respectively in this comment.
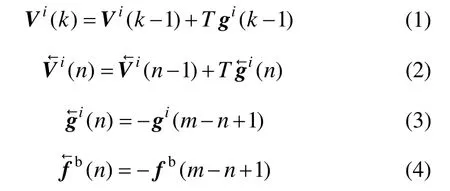
Where (1) and (2) are discrete velocity equations for forward and backward process respectively, (3) and (4) are relationship equations between the forward and backward processes for gravity and specific force respectively, the superscript" ← "denotes the terms for backward process, discrete time index for forward computation is k(k=1,2,…,m), time index for backward computation is n(n =1,2,…,m).
From (1)(2) and (3), it can be easily concluded that

Reference [6] reverses the sign of the acceleration (shown as (3) and (4)). So in the backward process, position of vehicle calculated by strapdown INS will keep moving forward until the sign of velocity is reversed. Then the total range calculated by a forward and backward process will not be zero. In other words, strapdown INS will not return to the starting points after one forward process and one backward process with the backward equations derived in [6].
In order to demonstrate the aforementioned statements, we have simulated the forward and backward process, and found that the calculated positions(longitude, latitude) and velocities(Vx,Vy) can not return to the starting points as expected. Though the differences of positions and velocities between starting points and ending points are small in low dynamic conditions for a short time, they will still deteriorate precision of calculated attitude to some extent, shown as Fig.2, which is not good for INS alignment.
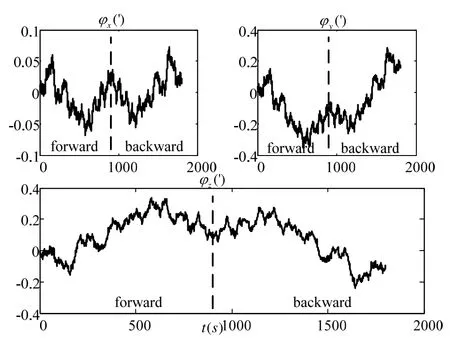
Fig.2 Navigation results after a forward andbackward process based on Reference [6]
2 Re-derivation of backward process for strapdown INS
In this section the rigorous strapdown equations for the backward process will be presented. Firstly two scenarios for forward and backward process of navigation are given.
Scenario I: trajectories of vehicle for forward and backward process are same.
Scenario II: for any two points on the trajectory, time intervals of forward and backward are same, with directions reversed.
Given two arbitrary pointsAand A'on the trajectory, lAand lA'← are tw←oposition vectors on forward trajectory, lAand lA'are two position vectors on backward trajectory. They have the following relationship according to Scenario I.


From (6)(7), we have
From (6)-(9), we can obtain that

In the same way, we can draw a similar conclusion that

From equations(7)(10)(11), we know that the accelerations between forward and backward process have following relationship:
Where AA( AA'),() are accelerations for forward and backward respectively. As can be seen from (10)-(12), every point on the trajectory has contrary velocity, but same acceleration for forward and backward process. Using the discrete time index for forward and backward process, we get the following more rigorous relation equations from (11) and (12), which are obviously different from previous equations (5)(4) and (3).
Fig.3 shows the new simulation results of our modification substituting (13)(14) and (15) for (5)(4) and (3) respectively with simulation conditions are completely the same as Fig.2. It can be seen that attitude angles (shown as Fig.3) all return to the original points after a forward and backward process.
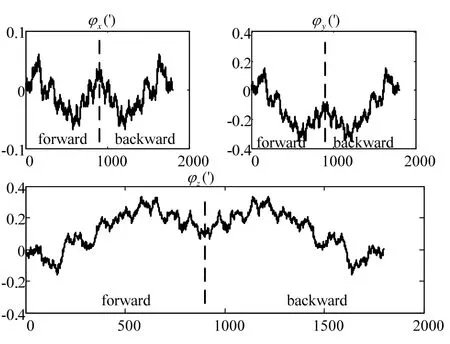
Fig.3 Navigation results after a forward and backward process using our modifications
In the same manner as derivation of linear motion equations (6)(10)(11), the angular motion equations (angular and angular rate ) for bidirectional processes are as follows, which completely coincide with the part of“Backward Process for strapdown INS Attitude”in [6]
3 Improved gyrocompassing alignment in bidirectional processes
Considering our goal is to design a very fast alignment method with reasonable accuracy, in this paper the improved fast gyrocompassing alignment for strapdown INS using bidirectional processes and inertial sensor denoising is as follows:
STEP 1: Navigation computer starts gyrocompassing alignment in normal manner using the outputs of FOGs and accelerometers while saves a block of inertial sensors outputs. Where(k ) and(k) are outputs of FOGs and accelerometers respectively;[1...m] and[1...m] are saved IMU data in time sequence;ωcis control angular rate vector of gyrocompassing loop, determined by equations (18)-(20) in gyrocompassing alignment loop.
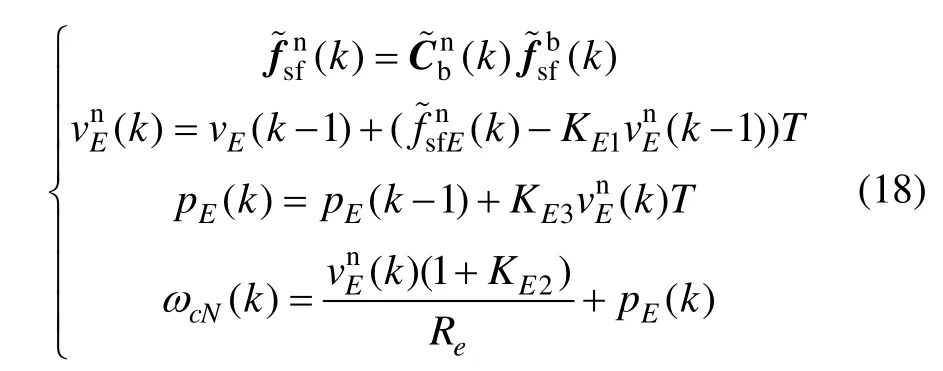
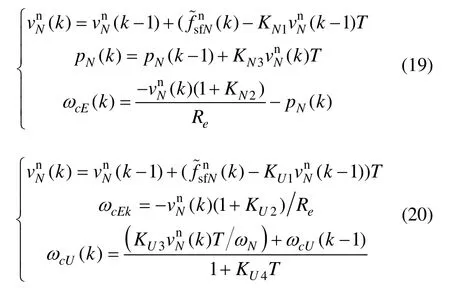
Where ωcN,ωcE,ωcUare three components of the control angular rate vector ωc; KE1,KE2,KE3,KN1, KN2, KN3, KU1, KU2, KU3, KU4are gyrocompassing loop parameters;,are east and north velocity; pE,pNare east and north position;is the attitude DCM determined by

STEP 2: The saved IMU data sequences[1...m] and[1...m]are reversed into[1...m] and[1...m] according to relationship equation←s (14) and (17). Then the data sequences[1...m] and[1...m]are denoised. Because IMU data has been saved, the offline denoising method is suitable. So a wavelet-based← denoising method[13]is adopted to obtain[1...m]and [1...m]. There are a family of dyadic wavelet functions φj,p(k) and a family of dyadic scaling functions φj,p(k)to decompose original signal. Given output of inertial sensor with noise ~s( k), the wavelet coefficients are obtained as follows:

Where cj,pand dj,pare approximations coefficients and details coefficients, respectively. They represent information of signal in frequency domain. Wavelet coefficients are processed in different frequency band as follows:
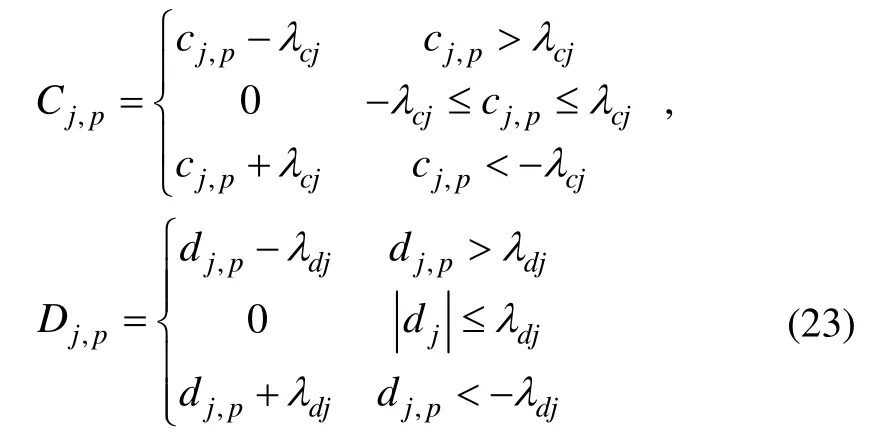
Where λcjand λdjare filtering thresholds of approximations and details coefficients in the j-th scale, respectively. Those new wavelets coefficients Cj,kand Dj,kare used to reconstruct data. The denoised data is calculated by

Equations (22)-(24) show main procedure of wavelet denoising. After inertial sensor denoising, the accuracy of alignment can be improved.
STEP 3: Navigation computer starts gyrocompassing alignment in backward process using the reversed IMU data. According to relationship equations(14)(16) and (17), the inputs and outputs of gyrocompassing alignment in backward process are relative to the ones in forward process as equations (25) and (26) respectively.

STEP 4: Denoised data sequences[1...m] and [1...m]are reversed into normal sequence as
STEP 5: Navigation computer calculates alignment using sequential denoised IMU data in forward process again, which is similar to STEP 1.But IMU data no longer need to be saved.
STEP 6: To repeat steps (3)(4) and (5), and calculate the alignment outputsθ,γandψ( pitch, roll and yaw).
4 Experimental Results
We have tested the improved fast alignment method on the FOG Strapdown INS developed by our research team. In order to evaluate the accuracy of alignment, the IMU is installed on a turntable.
In the experiment, the turntable keeps level with heading of 36.7° (2202 arcmin). The conventional method completes alignment in 660 s. The improved method uses IMU data of 100 s length to complete fast alignment using forward processes 5 times and backward processes 4 times. The first forward process(F1) calculates online (as described in “STEP 1”), which costs 100 s. The 100 s length data is saved in external FLASH, denoised using wavelet, and aligned offline in bidirectional processes. The remaining 8 bidirectional processes cost navigation computer about 80 s. So the whole procedure needs about 180 s to complete fast alignment. Curves of alignment are shown in Fig.4. Total compared performances of experiment are listed in Tab.1
In the experiment, the random noise has been reduced obviously. Because the angle random walk errors are greatly repressed, the improved method has better performance on yaw alignment with offline denoising of inertial sensors using wavelet, as shown in Fig.4c while with almost the same accuracy of pitch and roll compared with conventional method as shown in Fig.4a and 4b. The conventional method costs about 11 min to complete alignment, while the improved method needs only about 3 min. The improved method has great advantage on alignment speed. A faster and more accurate alignment can be obtained.
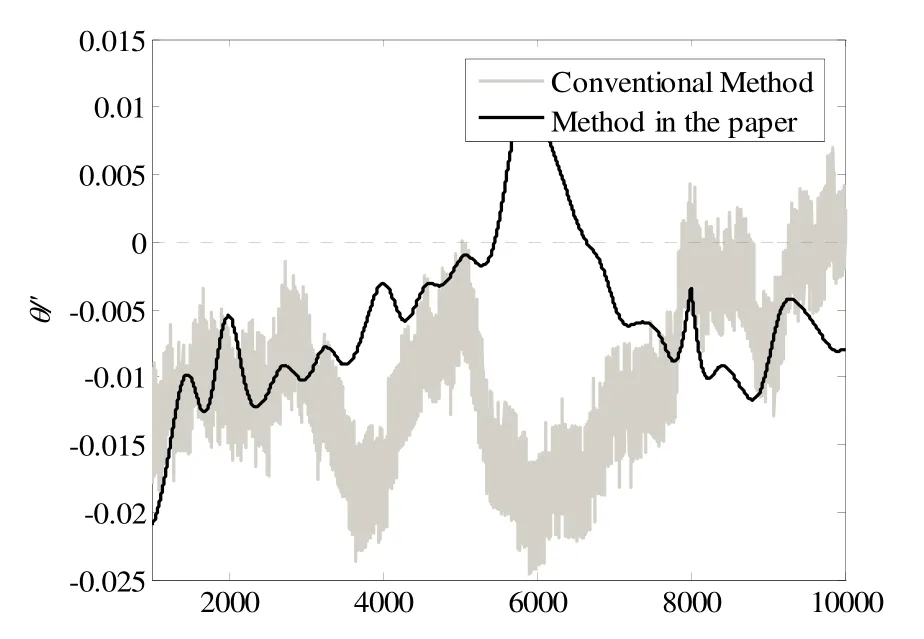
Fig.4a Pitch error (last 9000 samples)
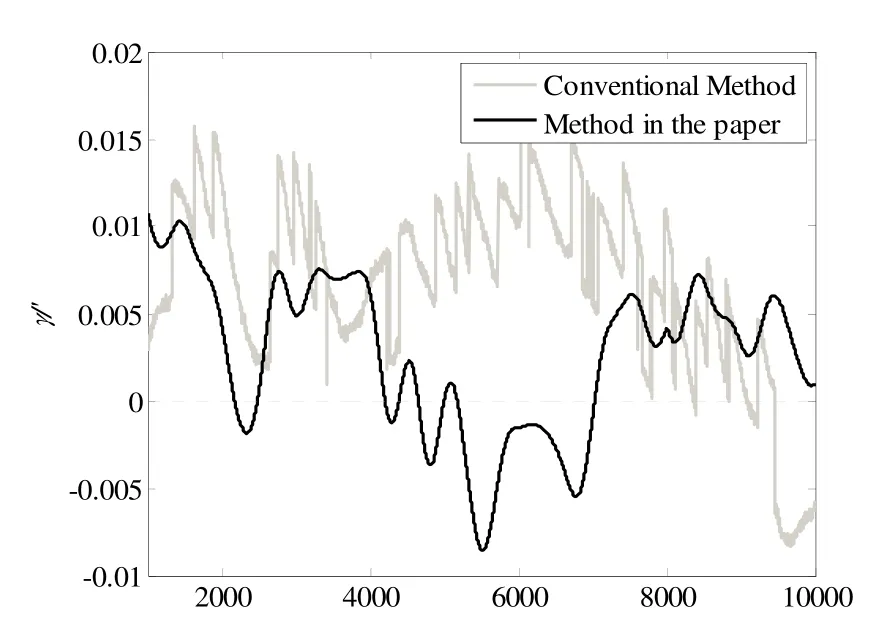
Fig.4b Roll error (last 9000 samples)
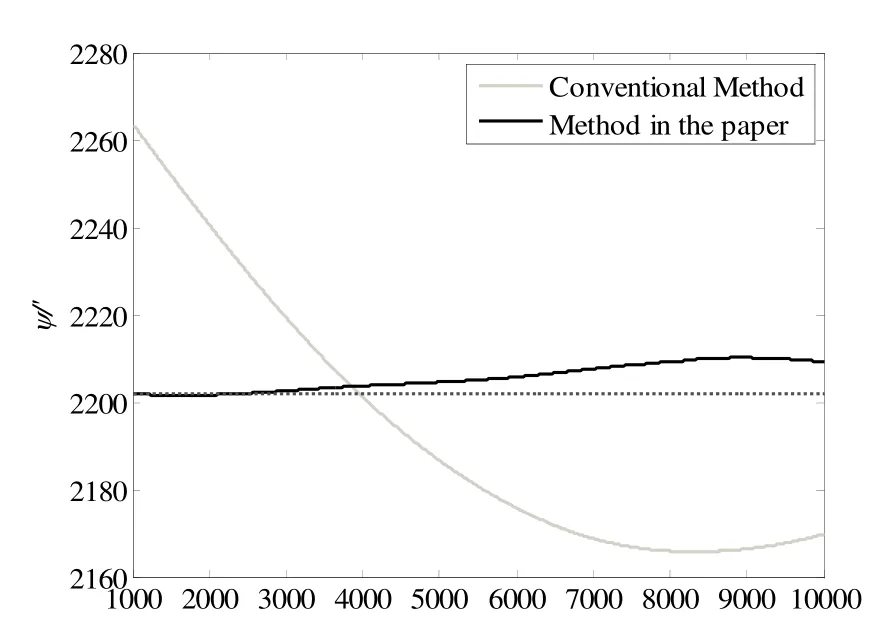
Fig.4c Yaw error (last 9000 samples)

Tab.1 Performances comparison
5 Main Conclusions
Initial alignment is an essential part of navigation calculation in Strapdown INS. To solve the fast alignment problem for FOG Strapdown INS, an improved alignment using bidirectional processes and inertial sensors denoising is proposed in this paper. At first, we point out that formulas in the backward process in [6] are incompletely rigorous, because the calculated positions, velocities, and attitude angles can not return to the exact starting points after a forward and backward process. These equations are only approximations in the low dynamic conditions for a short time. Then we modify the equations for backward process, a new relationship between forward and backward processes for Strapdown INS is presented. Considering the limitation of online estimation of inertial error in a short time, we choose an improved gyrocompassing alignment method instead of Kalman filter, hybridized by bidirectional processes in this paper. In order to reduce the effect of angular random walk, a wavelet-based denosing method is adopted to reduce noise of the saved IMU data offline.
We have tested the improved fast alignment method on the FOG Strapdown INS which is developed by our research team. From the results of experiments, we can tell that both the conventional and the improved methods have almost the same accuracy of pitch and roll. But the improved method has great advantage on the alignment speed. The conventional method costs about 11 min to complete alignment, while the improved method needs less than 3 min. And the improved method also has better performance on yaw accuracy with offline denoising of inertial sensors. A faster and more accurate alignment can be obtained.
[1] Wu Y X, Zhang H L, Wu M P, Hu X P, et al. Observability of strapdown INS alignment: A global perspective[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 78-102.
[2] Jamshaid A, Fang J C. Alignment of strapdown inertial navigation system: A literature survey spanned over the last 14 years, 2006. [2014-04-20]. http://www.robstoddard. com/ kalmanlib/StrapdownAlignment.pdf
[3] Chung D Y, Lee J G, Park C G, Park H W. Strapdown INS error model for multiposition alignment[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(4): 1362-1366.
[4] Fang J C, Wan D J. A fast initial alignment method for strapdown inertial navigation system on stationary base[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(4): 1501-1505.
[5] Groves P D. Principles of GNSS, inertial, and multisensor integrated navigation systems[M]. Boston, London: Artech House, 2008.
[6] Gao W, Ben Y Y, Zhang X, Li Q, Yu F. Rapid fine strapdown INS alignment method under marine mooring condition[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 2887-2896.
[7] Bose A, Puri S, Banerjee P. Modern inertial sensors and systems[M]. Prentice Hall of India, New Delhi, 2008.
[8] David H T, John L. W. Strapdown inertial navigation technology[M]. 2nd Ed. MPG Books Limited, Bodmin, Cornwall, 2004.
[9] Qin Y Y. Inertial navigation[M]. Beijing: Science Press, 2006: 14-26.
[10] Grewal M S, Miyasako R S. Application of Kalman filtering to the calibration and alignment of inertial navigation systems[J]. IEEE Transactions on Automatic Control, 1991, 36(1): 4-13.
[11] Acharya A. Improving self-alignment of Strapdown INS using measurement augmentation[C]//Proceedings of the 12th International Conference on Information Fusion. July 2009: 1783-1789.
[12] Savage P G. Strapdown analytics[M]. Strapdown Associates, Inc., Maple Plain, Minnesota, 2000.
[13] Charles B. Inertial navigation systems[M]. McGraw-Hill Book Company, 1964.
[14] Hua C. Gyrocompass alignment with base motions: Results for a 1 nmi/h INS/GPS system[J]. Journal of the Institute of Navigation, 2000, 47(2): 65-74.
[15] Jiang Y F. Error analysis of analytic coarse alignment methods[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34: 334-337.
[16] Zheng E. Performance analysis on gyrocompassing alignment of strapdown inertial navigation system[J]. Journal of Northwestern Polytechnical University, 1988, 6(1): 119-126.
[17] Naser E S, Noureldin A. Wavelet de-noising for IMU alignment[J]. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(10): 32-39.
[18] Sabatini A M. A wavelet-based bootstrap method applied to inertial sensor stochastic error modeling using the Allan variance[J]. Measurement Science and Technology, 2006, 17(11): 2980-2988.
[19] Noureldin A, Osman A, Naser E. A neuro-wavelet method for multi-sensor system integration for vehicular navigation[J] Measurement Science and Technology, 2004, 15(2): 404-412.
[20] Han D G, Li Y F, Mei S Q, Fu J. An adaptive fuzzywavelet method of signal processing for fiber optic gyroscopes[J]. International Journal of Fuzzy Systems, 2011, 13(4): 276-281.
1005-6734(2014)04-0453-06
10.13695/j.cnki.12-1222/o3.2014.04.006
基于正逆向与降噪的捷联惯导改进快速对准方法
覃方君,李 安,许江宁
(海军工程大学 电气工程学院,武汉 430033)
针对捷联惯性导航系统(INS)的快速对准问题,基于双向过程和惯性传感器的降噪方法,提出了一种改进的对准方法。利用双向过程(前向和逆向)反复处理保存的惯性测量单元(IMU)的数据序列实现快速对准,推导了一种新的前向与逆向对准关系。为了减少角随机游走误差的影响,基于小波变换的降噪方法抑制光纤陀螺(FOGs)和加速度计噪声,给出陀螺罗经回路的改进方法的整个流程,并在自研的光纤陀螺捷联惯导系统上进行测试。实测数据实验结果表明,经正逆向与降噪改进后的快速对准方法具有更快的收敛速度,能在不到3 min内完成对准任务,同时也具有更好的对准精度。
捷联;惯导;对准;双向过程;降噪
U666.1
A
2014-02-28;
2014-07-06
国家自然科学基金(61104184);湖北省自然科学基金(2011CDB054)
覃方君(1979—),男,工学博士,讲师,从事船用惯性技术及应用研究。E-mail:haig2005@126.com
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11