美国先进野外无人战车发展历程
2014-11-26 19:13陈云峰邹丹
轻兵器 2014年14期
陈云峰+邹丹
早在2001年,NREC就开展了“无人地面战车”和“野外感知”两个无人车辆研究项目,前者重点研究车体结构、动力、机械设计等部分,2002年研制成功后开始进行多项测试,并不断改进。后者主要研究感知和自主导航能力,通过不断开发和测试,2004年技术较为成熟。在这两个项目成功的基础上,2004年2月,NREC开展了UPI项目,并取得阶段性成果。让我们一同回顾其走过的历程。
“蜘蛛”无人地面战车
“无人地面战车”项目于2001年开发出原型车,在持久性、通过障碍和载荷方面展现了先进的性能,其不必考虑人员问题,在减少后勤保障以及燃油经济性、高负载和简化的传动系统方面,都为未来战斗系统(FCS)计划提供了出色的可部署性。
美国国防高级研究规划局和陆军评估无人地面战斗车辆(UGCV)主要有3个指标:
持久性——在不加油的情况下可执行14天、距离450km的任务;
越障性——可攀越1m以上、2m以下的障碍,35°的斜坡;
有效载荷部分大于满载总体质量25%。
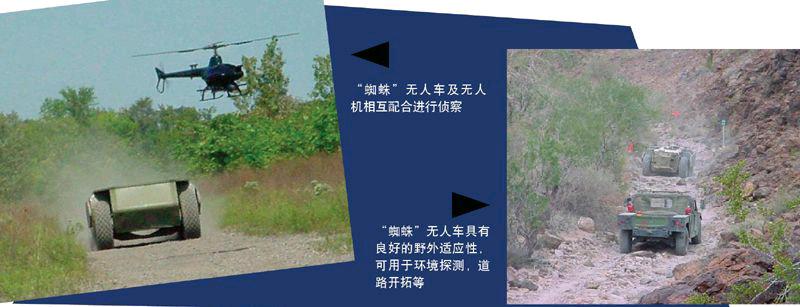
在UGCV项目中,NREC率领一个团队(波音公司、Timoney技术公司、DRS-TEM公司)设计了创新型的“蜘蛛”无人地面战车,其在保证高燃油效率、生存能力和灵活载荷基础上的极端地形适应能力和远距离行驶能力,能满足未来战斗系统(FCS)的任务要求。
“蜘蛛”无人地面战车是一个持久耐用、可翻转和六轮全驱混合动力系统,底盘低,行驶噪音小,可轻松遥控。
“蜘蛛”无人地面战车最大的优势是其无人化设计,采用独特的车体结构来提供一个大容量的载荷仓,可根据有效载荷的位置向上或向下调整载荷仓。目前,正在对“蜘蛛”无人地面战车全面评估各种地形、天气状况和操作环境下的性能。
同步进行的
“野外感知无人车”项目
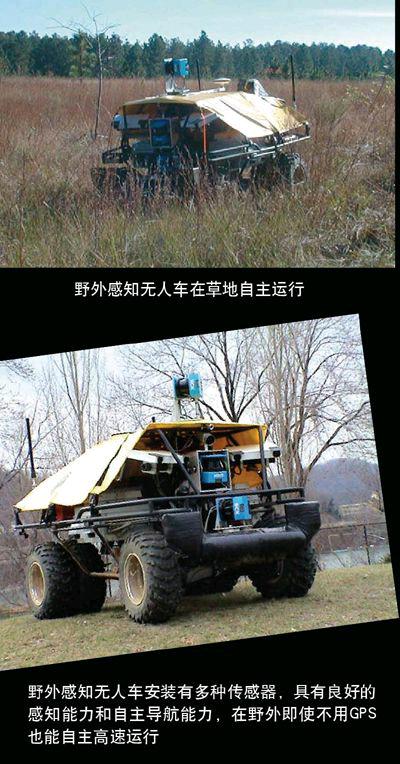
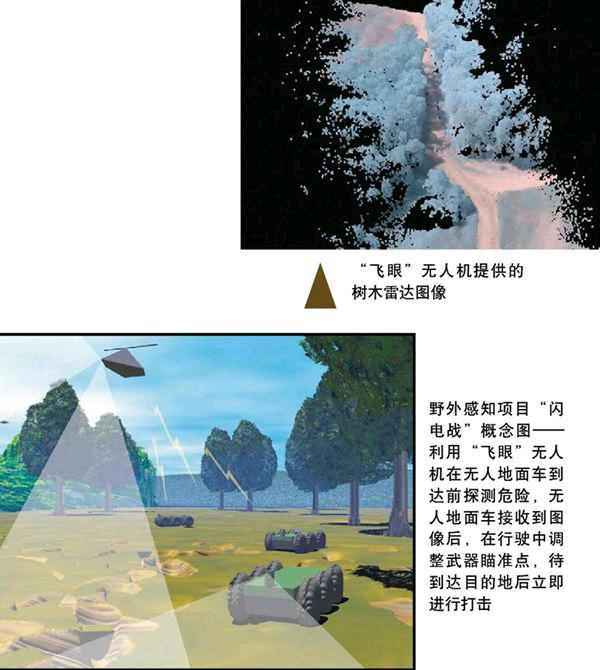
与“无人地面战车”同时启动的“野外感知无人车”项目旨在开发野外复杂环境下地面车辆的感知和自主导航能力。在“野外感知无人车”项目中,NREC率领另外一个团队(Sarnoff公司、波音公司及机器人技术工程卓越公司)进行技术开发。该团队创造性地提出“闪电战”概念——在无人车的传感器检测到危险之前,由“飞眼”无人机先期飞到无人车预定地点的高空来搜寻危险,并将探测图像及时传至无人车系统。接收图像后,无人车在行驶中调整武器瞄准点,待到达目的地直接进行打击。野外感知无人车的所有系统可自主运行或进行少量人工干预。
2002年,NREC团队在4种地形下成功完成了测试评估:弗吉尼亚的森林、亚利桑那州的沙漠、加州的山地和路易安那州的森林低地。该小组充分展示了空中/地面无人组合感知并避免障碍和其他危险的能力。
2003~2004年,团队通过开发和现场测试,使无人车的自主性能进一步成熟。包括提高无人车的速度,并降低对GPS和通信工具的依赖。
UPI项目下的
“破碎机”无人车
无人地面战斗车感知越野综合计划(UPI)项目启动于2004年7月,旨在将“无人地面战车”和“野外感知”这两个平行开展的项目整合在一起。
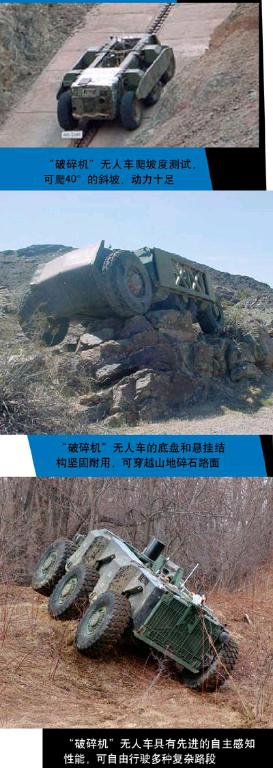
在UPI项目下,NREC设计了“破碎机”无人车,与前一版本的“蜘蛛”无人地面战车比较而言,其采用了新车体、新悬挂系统,并有许多新型技术的开发和改进。对“破碎机”无人车的机动性和自主系统已经进行了测试,这一运动平台集成了多种传感器,用于增强无人车的自主机动性。
“破碎机”无人车系统质量5.9吨,比上一代“蜘蛛”无人车减重30%,满载燃油时总质量6.35吨,可越过1.22m高的垂直墙,最大速度11m/s,爬坡度40°。自身负载能力达1.36吨,满载时总质量7.71吨,一架空军C-130“大力神”运输机一次可运输两辆满载的“破碎机”无人车,并空投到地球上任一区域。“破碎机”无人车可以负载任意的货物组合,包括武器或者侦察监视装备。
建立在“野外感知”项目成功的基础上,“破碎机”无人车感知和自动化系统向高速自主运行的方向发展。“破碎机”无人车一直不断进行恶劣环境测试,用于改进持久性、克服障碍能力。通过对“破碎机”无人车平台不断的测试,对其性能不断进行改进,以使其具有更大的地形适应性。有效载荷的开发、集成和测试都是根据相关任务场景来进行的。凭借“破碎机”无人车的独特地形适应性,这些场地测试向我们展现了未来自主车辆在战场上的使用。
2007年1月22日~2月2日,UPI项目组在德克萨斯州布利斯堡的沙漠成功完成了为期两周的实地测试。该小组评估了“破碎机”无人车不同配置下自主感知系统的性能:近距离配置时感知范围不小于18m,远距离配置时感知范围不小于50~65m。
测试全程有不到10%为道路(或可以粗略地被认为是道路),其中有些是车辙和从附近的山上流下的水流地段。剩下的就是沙丘、洼地、斜坡、沟渠、巨大的仙人掌地,以及其他沙漠地特有的高低不平的地形。“破碎机”无人车在最少的人工干预条件下可顺利通过德州的沙漠地形。endprint
“破碎机”无人车具有良好的性能,即使使用低分辨率或没有事先地形数据,在没有干预的情况下,一段1.63km的路程中,车辆达到3.41m/s的平均速度。如使用近程感知系统,平均行驶速度为2.7m/s。


接踵而至的自主平台
演示(APD)无人车
该无人车项目是由美国陆军坦克和汽车研究发展工程中心(TARDEC)赞助的,开始于2007年5月。自主平台演示(APD)无人车是在“破碎机”无人车的基础上开发、集成和测试下一代无人地面车辆(UGV)技术。这些技术包括混合动力驱动系统、先进的车辆悬挂系统以及轻量化底盘技术。
APD无人车的主要性能参数包括最高时速达到80km/h,并具有自主变换车道的能力。其质量及规格尺寸要求为,使用一架C-130运输机可部署两辆车。该车全质量为9.3吨,侦察模块伸长后全车长4.57m,采用混合动力系统。APD项目继续保持了核心机动性技术,并对其进一步发展。APD无人车最终将替换“破碎机”无人车。
对NREC的设计人员来说,80km/h的速度是极大的挑战,因为要找到合适的刹车控制方式。为了满足这个指标,NREC的人员深入进行了悬架技术和配置、车体结构、车辆的驱动结构、电池技术、冷却方法和发动机的研究。该小组在2008年8月成功完成了初步设计评审。他们设计的车辆在2009年8月进行了首次展示。随后,APD无人车将进行广泛的机动性测试。
小型“破碎机”无人车
由于大型“破碎机”无人车成本非常高昂,目前出现了简化的小型“破碎机”无人车。小型“破碎机”无人车是一种小型、坚固耐用、多功能的地面车辆平台,尺寸为762mm×508mm×305mm,全系统质量为56.7kg。其良好的机动性与稳定性、较大的载荷能力以及模块化的设计,使其成为各种任务的理想平台。潜在用途包括矿山测绘、应急反应、监测危险的工业环境,危险品的处理、排爆、侦察和监视等。小型“破碎机”无人车上方敞开的4.57m2车斗可以放置许多不同的载荷和传感器。设计人员可以很容易地修改这个通用平台,以满足不同客户需求。
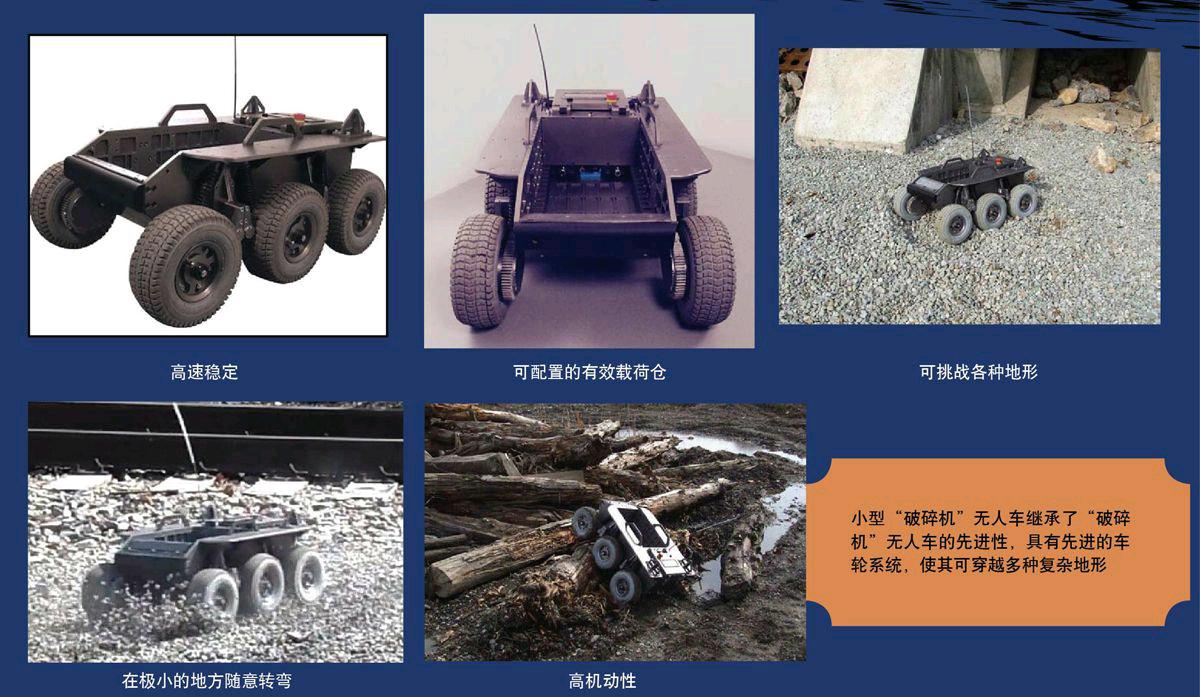
小型“破碎机”无人车的有效载荷高达45.4kg,在一个敞开的30m3的托架箱上,可以安装相机、雷达和其他传感器。其21.6m2的侧翼给予足够的空间用于安装摄像头、激光雷达和其他传感器。紧凑的尺寸使得它便于运输。小型“破碎机”无人车的电池组是由一家商业公司提供的铅酸电池,廉价且容易更换。
小型“破碎机”无人车的六轮独立悬挂系统可穿越具有挑战性的障碍,即使在高速行驶时也具有优异的稳定性。其模块化结构也有利于维护。小型“破碎机”无人车的防滑转向使得它非常容易操作,即使在它以最高速度行驶时也非常稳定,可以穿越砂砾、岩石、木块等障碍。
成立于1995年的NREC一直不断与军方合作进行无人车项目的研发和测试,“破碎机”无人车或其他类似产品是野外任务的理想选择。根据特定任务进行有效载荷的开发、集成和测试,通过“破碎机”无人车独特的越野能力和先进的传感和自主系统,以有效完成各类任务。野外无人战车有着深远的发展前景。

猜你喜欢
军事文摘(2022年17期)2022-09-24
小哥白尼(军事科学)(2022年4期)2022-07-08
小哥白尼(军事科学)(2020年7期)2020-05-22
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
小朋友·快乐手工(2018年3期)2018-04-22
军营文化天地(2017年11期)2017-12-08
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
小朋友·快乐手工(2015年1期)2015-03-13