
基于MMG和船舶领域的对遇局面自动避碰
2014-11-29 03:07贺益雄黄立文牟军敏
中国航海 2014年4期
贺益雄, 黄立文, 牟军敏
(1.武汉理工大学 航运学院, 武汉 430063; 2.内河航运技术湖北省重点实验室, 武汉 430063)
基于MMG和船舶领域的对遇局面自动避碰
贺益雄1,2, 黄立文1,2, 牟军敏1,2
(1.武汉理工大学 航运学院, 武汉 430063; 2.内河航运技术湖北省重点实验室, 武汉 430063)
为研究开阔水域中船舶对遇局面下的自动避碰方案,对对遇局面中两船会遇的不同阶段进行划分,在此基础上进一步分析实现船舶自动避碰需对会遇局面要素进行的定义和计算。提出使用船舶三自由度MMG水动力模型和平移中心椭圆船舶领域模型理论,研究对遇局面避碰要素数值化计算模型和不同阶段的自动避碰方案规划。仿真结果表明:三自由度MMG水动力模型精度能够满足研究和应用要求;基于二分法的数值计算模型能可靠、快速地收敛。研究成果能为最终实现船舶对遇局面下的自动避碰奠定坚实基础。
水路运输;船舶领域;水动力模型;定量会遇局面要素;自动避碰;对遇局面
传统的自动避碰研究多以来船方位、航速等决定自动避碰方案,部分以导弹制导、机器人避碰原理等确定碰撞危险度及自动避碰方案。[1-4]这些方案均未充分考虑来船航向、本船操纵性能等对避碰方案的影响及会遇不同阶段中避碰方案的差异,导致自动避碰方案偏离避碰规则和海员通常做法,从而使其在航海实践中的应用受到很大限制。根据《1972国际海上避碰规则》(以下简称《规则》)的内涵、外延和大众对其公认的理解,两船在海上以对遇态势相遇直至发生碰撞的过程可分为多个阶段[5],不同阶段下船舶应采取的避碰方案是不同的。实践中,驾驶员通常以几何方法,按《规则》、海员通常做法和本人的知识、技能、经验等,确定避碰方案并执行。人是智能的,可根据局面智能地判断所处阶段并决定避碰方案;与之对应的自动避碰须依赖不智能的计算机完成整个控制过程,须基于阶段的准确划分做出判断,并生成避碰方案。因此,各对遇阶段须严格定义,使机器判断成为可能。同时,需要对对遇局面下的碰撞危险、紧迫局面和紧迫危险进行定量分析和计算。
从《规则》和海员通常做法出发,以基于MMG(Mathematical Model Group)水动力方程的船舶仿真模型和船舶领域理论为基础,根据对碰撞危险、紧迫局面、紧迫危险等避碰局面要素的定义和公认理解,研究这些要素的定量计算模型;基于这些要素,对局面进行划分,同时参照其他信息生成自动避碰方案。
1 对遇局面自动避碰建模
1.1假设
1) 水域平静、开阔;避碰过程中不考虑减速避让;不考虑协调避让;来船船位、航向、航速已知。
2) 不考虑横摇、纵摇、垂荡影响。
1.2定义
1) 对遇局面指来船和本船在各自船首半个罗经点以内。
2) 船舶领域指船舶操纵人员意图防止他船和静止物标进入的船舶周围一定范围内的有效区域。[6-7]
3) 紧迫局面表示在该局面下,本船右满舵转向,来船亦将进入本船船舶领域。形成点为一时间或位置点,此时本船右满舵转向,来船最终与本船船舶领域边界相切。
4) 碰撞危险满足以下条件局面:
(1) 保向保速,来船进入本船船舶领域;
(2) 距离≤6 n mile,最终碰撞危险为不论当前是否有碰撞危险,两船保向保速最终出现碰撞危险。
5) 紧迫危险表示该局面下,本船右满舵转向,两船亦将碰撞。形成点为本船满舵向右转向,两船不碰撞的最后时间点。碰撞的含义定为两船重心距离小于两船船长之和的1/2。
1.3船舶会遇局面分析
两船海上相遇至发生碰撞可分为多个阶段[1]:
1) 碰撞危险未形成之前的自由行动阶段。
2) 碰撞危险至紧迫局面形成阶段。
3) 紧迫局面至紧迫危险形成阶段。
4) 紧迫危险至碰撞发生阶段。
2 避碰局面要素定量计算建模
2.1坐标系
所采用的坐标系见图1:
1) 大地固定坐标系XOY,Y轴正向指向正北,X轴正向指向正东,方向向右为正。
2) 随船移动坐标系xOy,y轴正向指向船头,x轴正向指向右舷,方向向右为正。
两坐标系的夹角为本船航向TC,与物标方位TB和舷角Q存在以下关系
TB=Q+TC
(1)
坐标转换关系
[X,Y]=[x,y]·A+[X0,Y0]
(2)
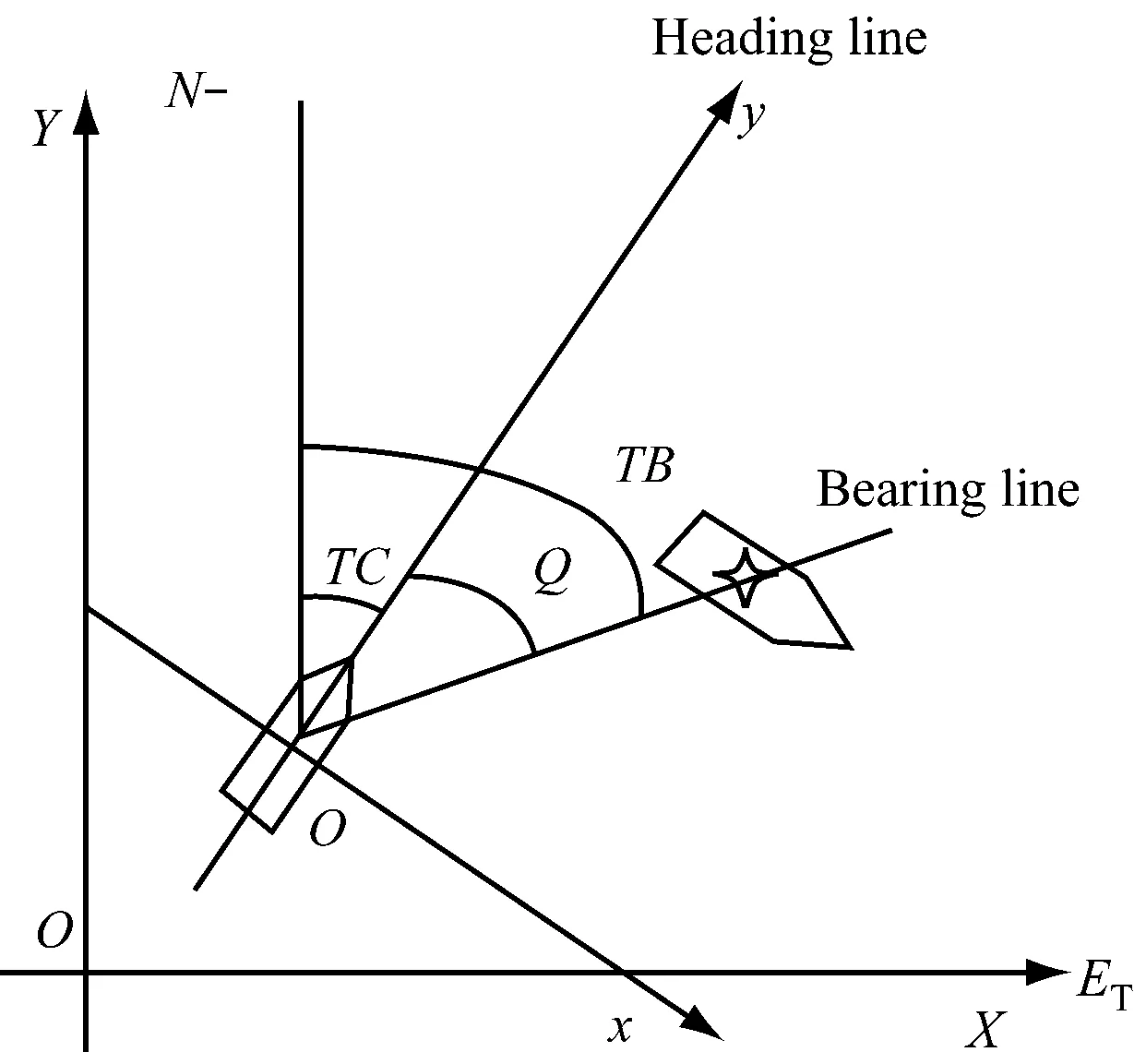
图1 坐标系示意图
从模拟仿真的过程来看,这种坐标系更符合航海习惯,与其他坐标系相比具有较明显的优势。
2.2船舶领域模型
[7-10],船舶领域模型采用偏移中心椭圆船舶领域模型(见图2)。
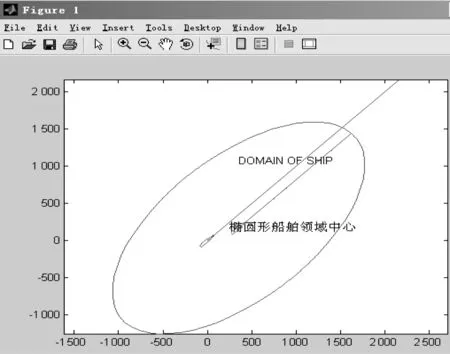
图2 偏移中心的椭圆船舶领域
船舶领域椭圆圆心为虚拟船位置,实际船位位于虚拟船位左后方。船舶领域的长轴长、短轴长、实际船位相对于船舶领域椭圆圆心的偏移量等参数可根据船舶特点、航行环境的不同等适当选取。研究中,模拟对象为一艘7.6万吨级满载散货船,在开阔水域中长轴a=8L,短轴b=4L,L为船长,中心偏移方向199°。偏移量为椭圆圆心沿实际船位方向到边界距离的1/4。
2.3船舶运动模型
基于分离模型(MMG)思想的船舶六自由度动力学方程已使用多年。[11-12]船舶避碰过程中纵摇、垂荡、横摇运动的研究意义不大,只需研究静水中纵向、横向和首摇3个方向的运动。静水中船舶三自由度动力学方程为
(3)
式(3)中符号的含义见文献[11-12]。船位坐标计算基于上述模型,选用龙格-库塔方法。
2.4避碰要素定量计算模型
若来船与本船构成碰撞危险,则必有紧迫局面形成点;若来船dCPA小于两船船长之和的1/2,有紧迫危险形成点。可计算紧迫局面形成点和紧迫危险形成点。
2.4.1紧迫局面形成点
(4)
Dis=f(t,tm)函数具体表达式为
(5)
(6)
若t≤tm,则

(7)

式(4)~式(7)中:上标t代表时刻;下标0代表本船;下标R代表来船;v代表速度;TC代表航向;(x,y)和(XR,YR)为本船、船舶领域中心、来船位置;rt为t时刻船舶领域椭圆椭圆心沿来船方向半径长;Rlingyu为船舶领域椭圆中心沿实际船位方向半径长;Qt为t时刻船舶领域中心看来船舷角。
rt=ab/((asin(Qt))2+(bcos(Qt))2)0.5
(8)
Rlingyu=r(Q=199)=ab/((asin(199))2+
(bcos(199))2)0.5
(9)
从问题物理意义来看,Dis=f(t,tm)具有以下性质:

2) 若来船相距较远,不操舵来船最终进入本船船舶领域,有min(f(t,0))gt;0,min(f(t,tCPA))lt;0。

2.4.2紧迫危险形成点
同求取紧迫局面形成点的数学模型,将船舶领域改成以本船重心为圆心、半径为两船船长之和的1/2的圆形区域。
3 仿真计算
3.1仿真数字船舶模型
以“2.2”中的船舶为模拟对象,使用MATLAB编程查验船舶数字模型的准确性,分别对不同转速下的航速和全速满舵旋回进行比较(见表1和图3)。

表1 MMG模型与实船航速性能比较
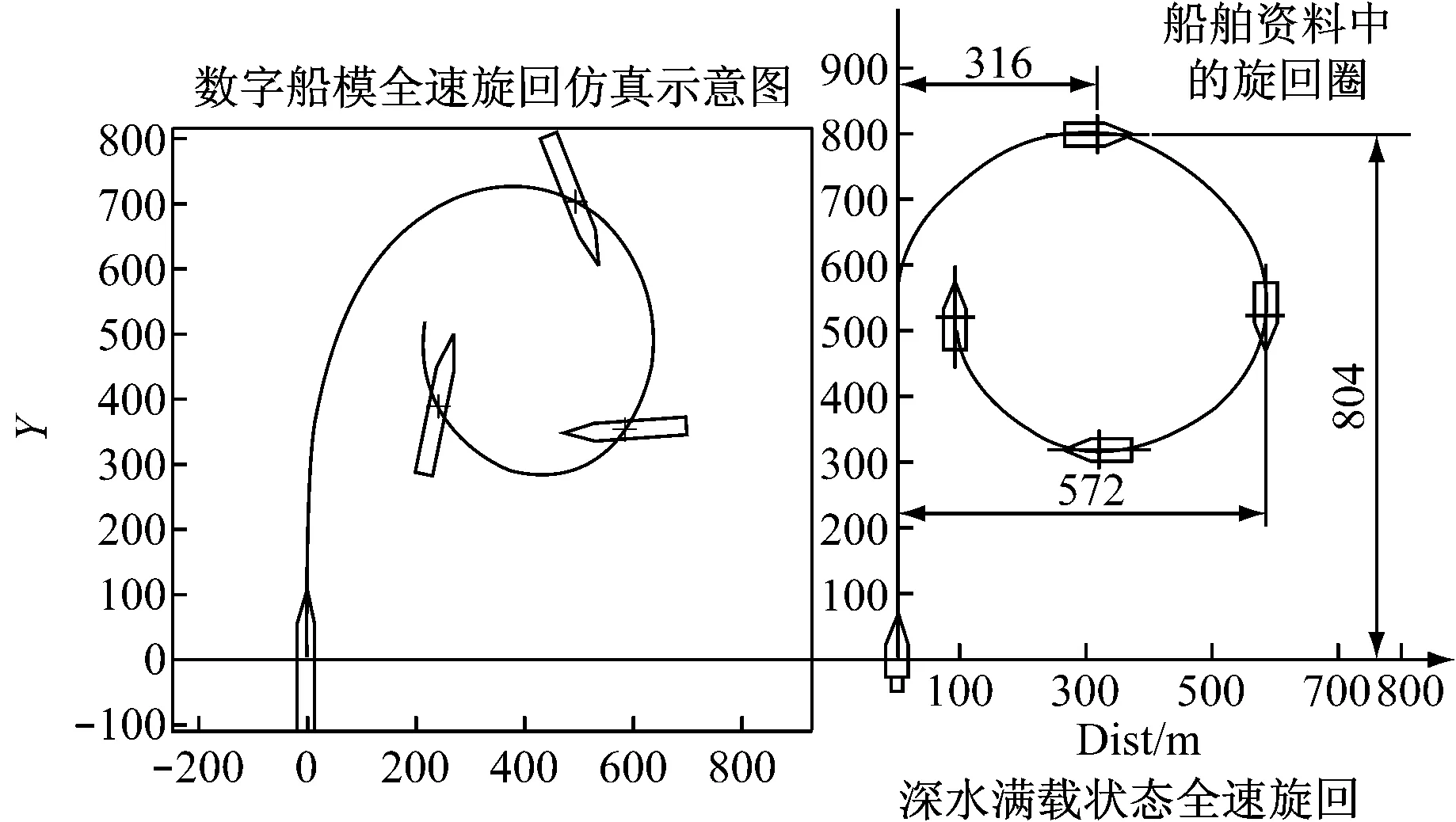
图3 模型和实船旋回性能比较示意图
结果表明,通过调整各种系数,船舶数字模型的船速性能和旋回性能与实船很接近。
3.2紧迫局面、紧迫危险形成点计算流程
使用二分法的紧迫局面、紧迫危险形成点定量模型计算流程见图4。
按以下初始条件仿真:来船船长200 m,方位045°,距离5.6 n mile,航速12 kn,航向225°,本船初始航速13 kn,航向045°。进行仿真模拟的输出结果为4 094 m/629 s后形成紧迫局面;4 615 m/710 s后构成紧迫危险。

图4 紧迫局面、紧迫危险形成点定量计算流程
4 对遇局面避碰方案选择
按照对遇局面要素定义和数值解法确定的时间点将对遇局面划分为不同阶段,应采取的避让措施分析如下。
若最终无碰撞危险,无须采取行动。否则:
1.碰撞危险未形成(阶段1)。可及早、自由地采取避让行动(向左、右均可)。
2.碰撞危险已形成,未构成紧迫局面(阶段2)。采取向右转向措施可确保在安全距离外驶过,程序中应按照《规则》第14条规定向右转向。
3.紧迫局面已经形成,紧迫危险尚未形成(阶段3)。此时不背离《规则》(最大幅度为右满舵)已不能安全通过,应按照《规则》第2条“责任条款”采取行动;如背离《规则》(最大幅度为左满舵)能够安全通过,则应背离《规则》向左转向避让。
如向左转向也不能安全通过,根据对遇局面的特殊情况,可比较本船航向C0与来船的航向C1、本船的方位TB0与他船看本船的方位TB1:
1) 若TB0≤C0且TB1≤C1,应大幅度右转。
2) 若TB0gt;C0且TB1gt;C1,应查验对方无转向动作后背离《规则》采取行动,及早大幅度左转。
3) 若TB0gt;C0且TB1≤C1,应大幅度右转。
4) 若TB0≤C0且TB1gt;C1,应通过比较两种方式避让时他船距船舶领域最近距离的大小确定向哪舷避让。
4.紧迫危险已经形成(阶段4)。应采取最有助于避免碰撞的行动,可通过比较向左和向右旋回避让时最近距离的大小决定向哪舷避让。
5 结 语
使用船舶三自由度MMG水动力模型和平移中心椭圆船舶领域模型理论,研究了对遇局面避碰要素数值化计算模型和不同阶段的自动避碰方案规划。仿真结果表明,采用的数学模型可靠,二分法算法能快速、可靠收敛;精度可满足自动避碰研究和实践要求。研究成果可产生对遇局面下船舶各个阶段符合避碰规则和海员通常做法的避碰方案。结合转向模型、复航模型,可生成各个时间点的可能避让方案;对所有方案进行最优化选择,可最终确定符合避碰规则和海员通常做法的最优化自动避碰方案。
参考文献
[1] 郑中义.船舶自动避碰决策系统的研究[D].大连:大连海事大学,2000.
[2] 陈锦标,王则胜.多船自动避碰决策探讨[J].南通航运职业技术学院学报,2005,4(3):52-54.
[3] TSOU Mingcheng, HSUEH Chaokuang. The Study Of Ship Collision Avoidance Route Planning By Ant Colony Algorithm[J].Journal of Marine Science and Technology, 18(5): 746-756.
[4] 周伟. 宽水域船舶智能避碰决策算法验证及优化[D].厦门:集美大学,2011.
[5] A.N.科克罗夫特,J.N.F.拉梅杰.海上避碰规则指南[M].4版.大连:大连海运学院出版社,1992:132-134.
[6] GOODWIN, E M.A Statistical Study of Ship Domains. [J].Journal of Navigation, 1971,28:328.
[7] DAVIS P V, DOVE M J, STOCKEL C T. A Computer Simulation of Marine Traffic Using Domains and Arenas [J].Journal of Navigation, 1980, 33: 215-222.
[8] FUJI I Y, TANAKA K. Traffic Capacity [J]. Journal of Navigation, 1971, 24: 543-552.
[9] 齐乐,郑中义,李国平. 互见中基于AIS数据的船舶领域[J].大连海事大学学报, 2011,37(1):48-50.
[10] SZLAPCZYNSKI R.Solving Multi-Ship Encounter Situations by Evolutionary Sets of Cooperating Trajectories [J].TRANSNAV, 2010,4(2):13-15.
[11] 李文魁,陈永冰,田蔚风,等.基于MATLAB的船舶运动控制实时仿真研究 [J].系统仿真学报,2007,19(19):4424-4427.
[12] YAVIN Y,FRANGOS C.Computation of Feasible Control Trajectories for the Navigation of a Ship Around an Obstacle in the Presence of a Sea Current[J].Mathl.Comput.Modelling, 1995,21(3):99-117.
AutomaticCollisionAvoidanceforShipsApproachingHead-OnwithMMGandShipDomain
HEYixiong1,2,HUANGLiwen1,2,MOUJunmin1,2
(1. School of Navigation, Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Inland Shipping Technology Key Laboratory, Wuhan 430063, China)
The automatic collision avoidance decision-making for ships approaching each other head-on is studied. Encounter situation changes with the distance between ships so the process of approaching is divided into stages when processing. The elements describing encounter situation are defined. The elements are quantitatively determined according to the MMG three-degree-of-freedom hydrodynamic model of the ships and the theory that a ship needs an elliptical domain. The maneuver plan for each stage of approaching is worked out. Simulations prove that the hydrodynamic model is accurate enough for this application and the computing model based on the method of bisection is good for its rapid convergence and reliability. The research may advance the development of automatic collision avoidance equipment.
waterway transportation; ship domain; hydrodynamic model; quantitative elements of encounter situation; automatical collision avoidance; approaching head-on
2014-07-28
湖北省自然科学基金(2014CFB878)
贺益雄(1976—),男,湖南新邵人,副教授,船长,博士生,研究方向为船舶自动避碰、船舶与海洋环境保护。
E-mail:heyixiong7@sina.com
1000-4653(2014)04-0092-04
U676.1
A
猜你喜欢
华人时刊(2022年7期)2022-06-05
船舶(2021年4期)2021-09-07
船舶标准化工程师(2019年4期)2019-07-24
小小艺术家(2018年1期)2018-06-05
军工文化(2017年12期)2017-07-17
中国船检(2017年3期)2017-05-18
新少年(2015年6期)2015-06-16
海外英语(2013年11期)2014-02-11
中国火炬(2011年1期)2011-08-15
