
大型远洋风帆助航船舶航向控制系统仿真
2014-11-29 03:01方军庭王国刚
中国航海 2014年4期
徐 立, 方军庭, 王国刚
(1.武汉理工大学 a.高性能船舶技术教育部重点实验室; b.能源与动力工程学院, 武汉 430063; 2.郑州宇通客车股份有限公司, 郑州 450061)
大型远洋风帆助航船舶航向控制系统仿真
徐 立1a,1b, 方军庭1a,1b, 王国刚2
(1.武汉理工大学 a.高性能船舶技术教育部重点实验室; b.能源与动力工程学院, 武汉 430063; 2.郑州宇通客车股份有限公司, 郑州 450061)
针对海风会对风帆助航船舶的航向产生干扰,设计一种稳定的风帆助航船舶航向控制系统。在MATLAB/Simulink平台下对风帆助航船舶的航向控制和不同风况下的保向性进行仿真研究。仿真模型输出的结果表明,运用该航向控制系统可以准确、迅速地调整航向,同时能够在海风的影响下维持风帆助航船舶的航向稳定性。
水路运输;风帆助航船舶;航向控制系统;保向性;仿真
随着地球资源日渐枯竭,开展可再生能源在船舶上的应用研究具有很高的实用价值和现实意义。在目前的海洋环境和技术条件下,将“风帆”作为船舶的辅助推进装置,是减少船舶燃油消耗,削减航运成本,降低二氧化碳、硫化物、氮化物等有害气体排放的有效措施。[1-2]
目前,典型的船舶航向控制方法有PID控制、自适应控制和智能控制3种。
1.传统的PID控制方法灵活性较高,能通过调整比例参数、微分参数、积分参数来应对船舶运动环境的变化,对船舶进行航向控制,具有可靠性高、稳定性好、简单方便的特点,被广泛采用。
2.自适应控制法能有效满足航向控制精度、减少操舵时的能源消耗,但控制参数难以调整、研制成本高,目前难以广泛应用于实船中。
3.智能航向控制法应用了人工智能技术,主要研究对象是航向控制器,该方法中的控制参数难以调整,控制器设计复杂,在实船应用中亦不多见。
综合分析国内外航向控制系统的研究现状和产品开发情况可知,在实际的航向控制系统应用中,以PID控制器为核心的自动舵占市场主导地位。
考虑到海风对风帆助航船舶的航向有干扰影响,在自动舵控制策略的基础上加入风帆助航船舶运动数学模型,对其航向控制问题进行研究。设计合适的自动舵控制策略和稳定的航向控制系统,使风帆助航船舶在有效利用海风资源、节能减排的同时,不会因海风的影响发生偏航、偏荡现象,避免船舶在不同风况下频繁操舵,维持航向稳定性。
1 风帆助航船舶航向控制策略
当船舶以风帆助航形式在水面上航行时,因不同风况干扰,船舶在受到风帆纵向推力影响的同时,亦受到横向侧推力和转艏力矩的影响,船舶实际航向与预定航向存在一定偏差,如不及时调整舵角,船舶将在行驶过程中越来越偏离原有航向,进而增大将船舶调整至预定航向的难度。因此,对风帆助航船舶航向控制系统有以下要求[3-4]:
1.在船舶定向行驶过程中,能保证船舶沿直线航行,若出现偏离,能立刻自动修正。
2.当船舶确定新的航向后,能自动操舵转向,并能对因转舵产生的转动惯量造成的船首摆动作出自动调整。
3.对因风帆助航产生的转艏力矩起克服作用,维护风帆助航船舶的航向稳定性。
根据风帆助航船舶的航向控制步骤,设计风帆助航船舶的航向控制策略(见图1)。
在风帆助航船舶航行过程中,将实际航向与预定航向产生的航向偏差φe输入至航向控制器,得到舵角偏差δe;将舵角偏差δe输入至舵机控制系统,得到操舵角δ;利用已建立的风帆助航船舶运动数学模型,以操舵角δ为输入、航向角φ为输出,得到实际航向,即可实现对风帆助航船舶的航向控制。[5]

图1 风帆助航船舶航向控制策略
2 风帆助航船舶航向控制器控制算法
2.1风帆助航船舶航向PID控制设计
选用PID控制器作为风帆助航船舶航向控制器,航向控制系统中控制器的数学模型[6-7]为
(1)
舵的模型为
(2)
式(2)中:舵角δ满足|δ|≤35°,转舵角速度≤2.5(°)/s。
因此,可在MATLAB/Simulink工具箱中建立风帆助航船舶的航向控制系统模型(见图2)。

图2 风帆助航船舶航向控制系统模型图
2.2PID参数整定
采用试凑法对PID控制器参数进行整定,根据控制参数对航向控制系统性能的影响程度,边调整参数,边观察系统的响应曲线,研究各参数对系统的影响,反复修改,直至出现满意的响应曲线,从而确定航向控制系统的PID控制参数。[8]
一般调整参数按照先比例参数,再积分参数,最后微分参数的步骤进行。增大比例环节参数有助于加快系统响应速度、减小静差,但该参数不能过大,否则会使系统产生较大超调、稳定性变差并产生振荡。减小积分环节参数能减少控制器对系统的积分作用,使系统趋于稳定、减少超调,但会使系统消除静差的速度变慢。增大系统的微分参数有助于加快系统的响应速度、减少超调、增加系统稳定性,但会减弱系统的抗干扰能力。
2.2.1比例参数的整定
将积分参数和微分参数调零,将比例参数从小到大逐渐增加,直到系统满足响应速度快、有一定超调为止。
2.2.2积分参数的整定
将积分参数由小到大逐渐增加,系统静差会逐渐减小甚至消除。反复调整,直到静差消除的速度符合系统设定为止。
2.2.3微分参数的整定
将微分参数从零开始逐渐增加,同时适当微调比例参数和积分参数,逐步试凑,直到系统响应符合设计要求为止。
按照以上原则,经过反复整定,确定控制器的参数KP=1.162,KI=0.01,KD=0.537 5。
3 风帆助航船舶航向控制系统仿真
在建立的Simulink仿真模型的基础上,输入船舶运动的初始参数,例如:风帆助航船舶在平静的海面上向正北方向作匀速直线航行,风速为0,主机转速为105 r/min,初始航速为13.5 kn。同时,在仿真模型中输入需要改变的航向,可得到改变航向时航向角、舵角、航向偏差、航行轨迹的输出。
改变航向为北偏东20°,在仿真模型中输入预定航向020°,其航向角、舵角、航向偏差和航行轨迹的输出见图3~图6。
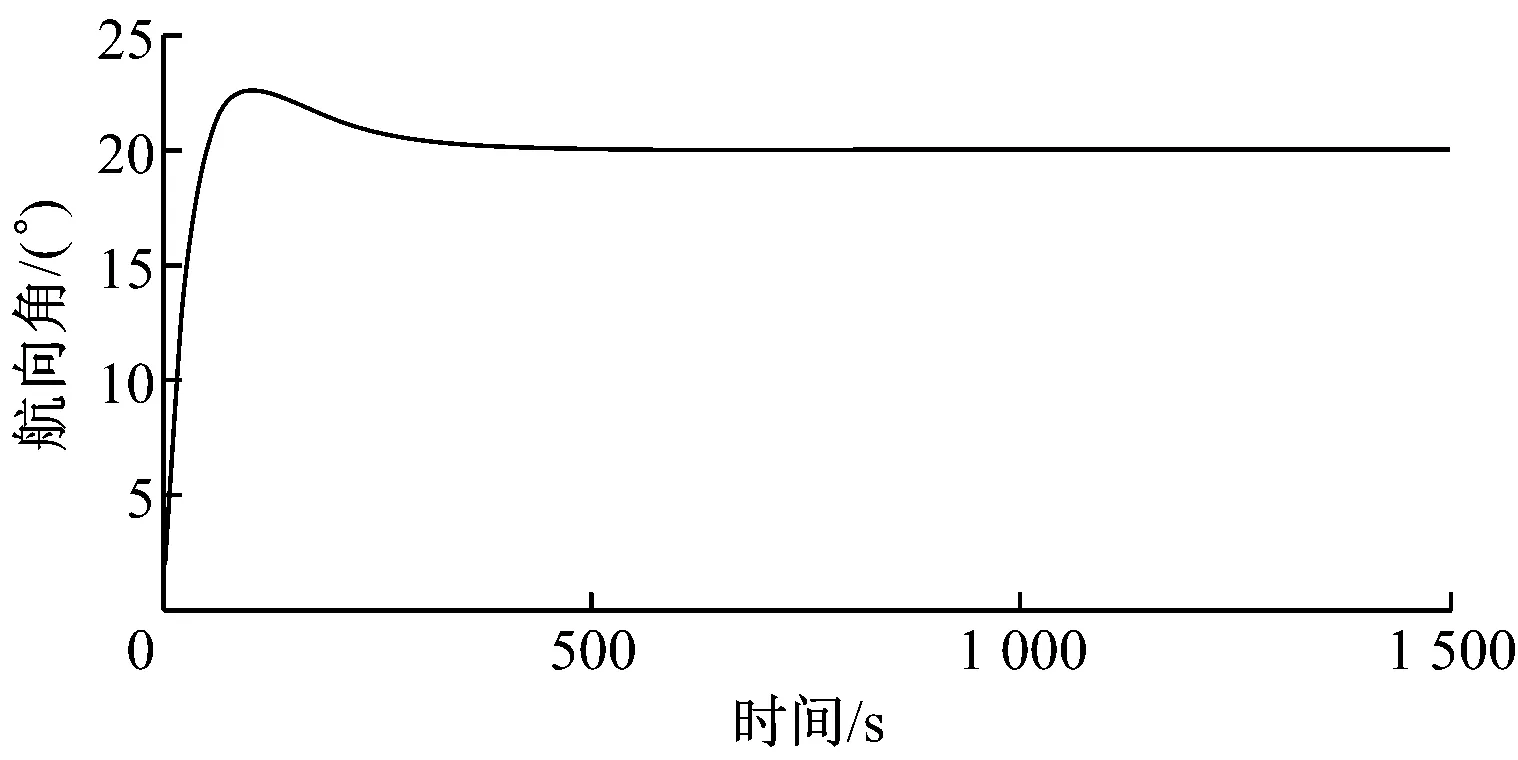
图3 给定航向偏差20°时航向角的输出

图4 给定航向偏差20°时舵角的输出
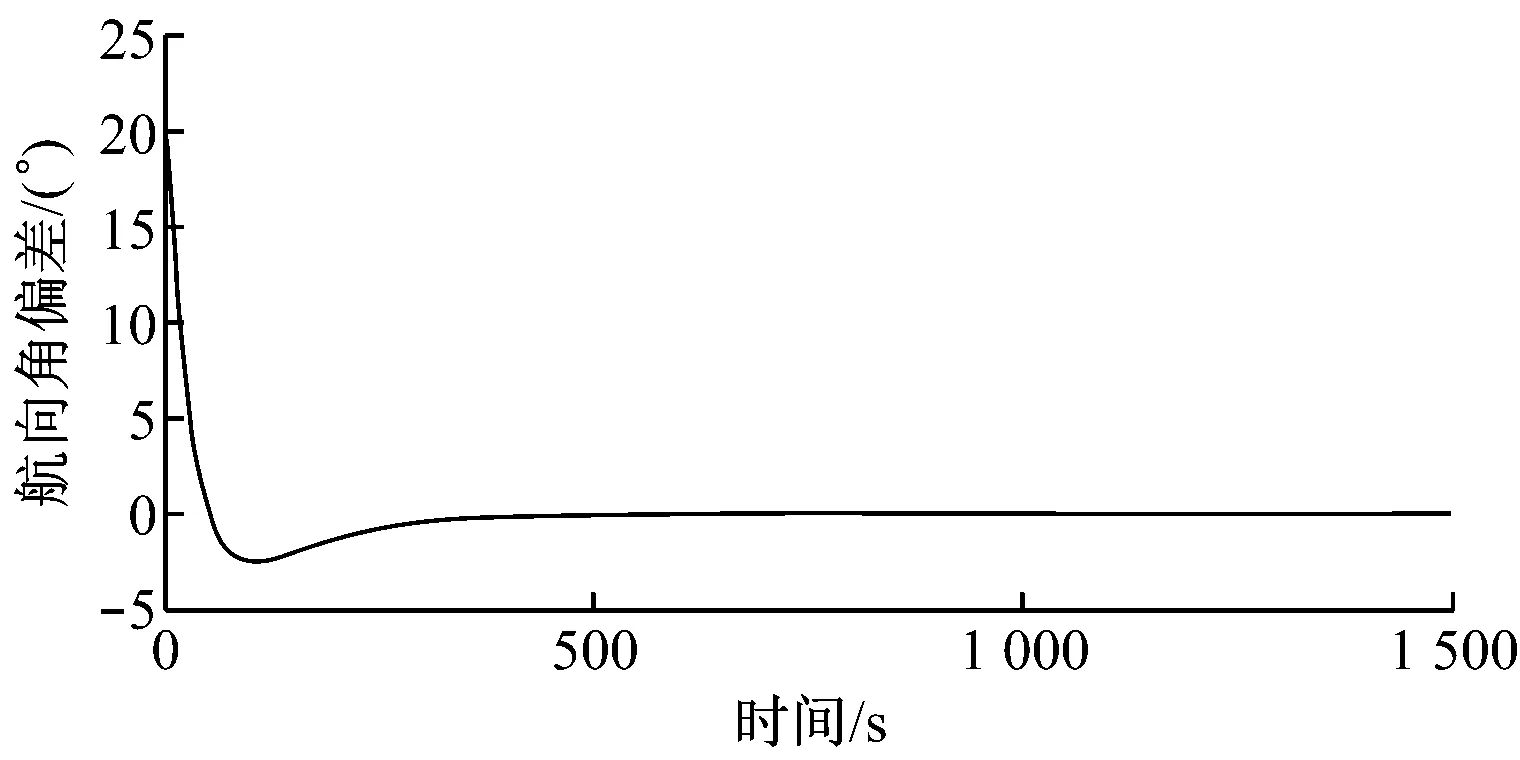
图5 给定航向偏差20°时航向角偏差的输出
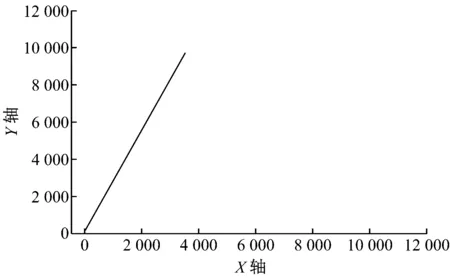
图6 给定航向偏差20°时船舶航迹的输出
从图3~图6中可以看出,当风帆助航船舶在原有航向航行时,被指定航向偏差20°后,能在大约400 s的时间内通过合理调节舵角,将船舶调整至新航向。观察船舶航迹输出可知,船舶能在PID航向控制系统下准确地调整航向,并在新的指定航向下稳定航行,说明设计的风帆助航船舶航向控制系统能有效控制航向,并保证船舶具有良好的操纵性能。
4 不同风况下风帆助航船舶的保向性仿真研究
利用设计的风帆助航船舶航向控制系统对风帆助航船舶在不同风况下的保向性进行仿真研究[9-10]。将76 000载重吨巴拿马型“文竹海”号散货船作为目标船,其相关参数见表1。

表1 “文竹海”号散货船相关参数
通过查找资料,得到“文竹海”号散货船航行线路上的风力资源分布见表2。
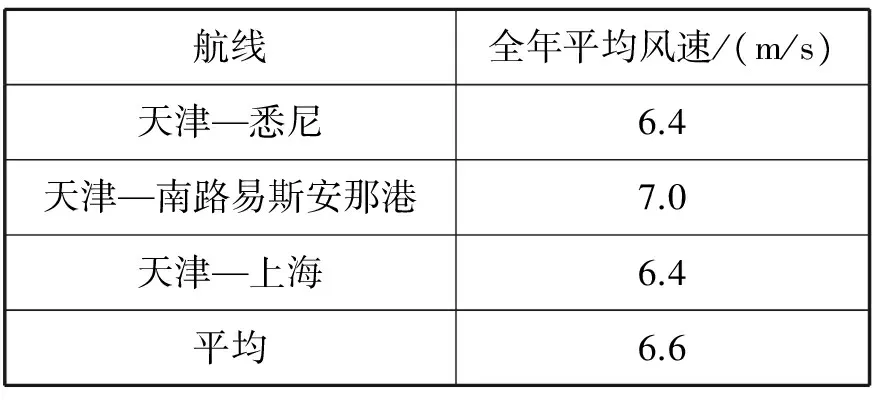
表2 典型航线上全年风能资源概况
根据典型航线上的风力资源概况,假设风帆助航船舶沿正北方向航行,船速为13.5 kn,主机转速为105 r/min,对风帆助航船舶在2种不同风况下的保向性进行仿真实验,船舶的初始状态见表3。
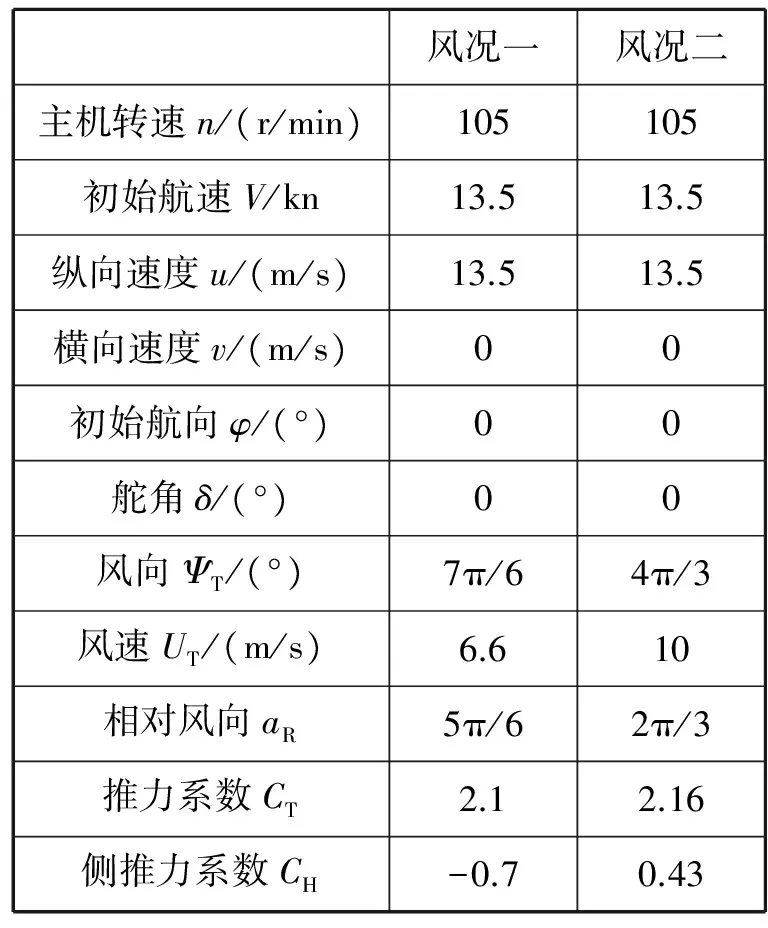
表3 风帆助航船舶保向性试验船舶初始状态
1.船舶以13.5 kn航速沿正北方向航行时,受到绝对风向角ψT=7π/6,相对风向角aR=5π/6,绝对风速UT=6.6 m/s的海风助推力。对此状态下的风帆助航船舶的航向、舵角、航行速度进行仿真(见图7),观察该风况对船舶航向的影响及为维持该航向舵角的调整情况,并计算该风况下船舶的增速。
2.船舶以航速13.5 kn沿正北方向航行时,受到绝对风向角ψT=4π/3,相对风向角aR=2π/3,绝对风速UT=10 m/s的海风助推力。该风况下的风帆助航船舶航向、舵角、航行速度仿真曲线见图8。
由图7~图8可知,在不同风况下,利用设计的航向控制系统,风帆助航船舶的航向、舵角、航行速度能够在短时间内趋于稳定。
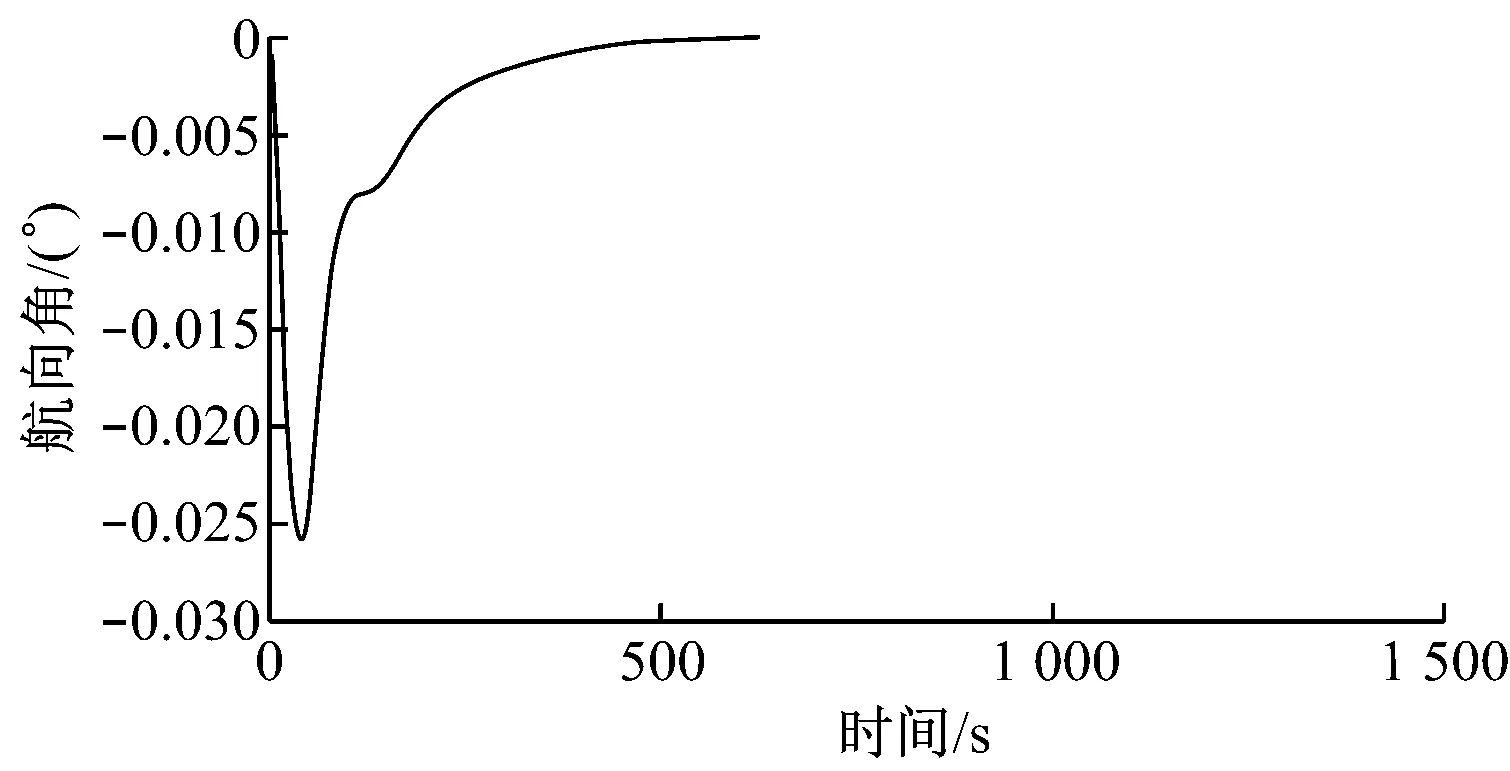
(a) 航向历时曲线
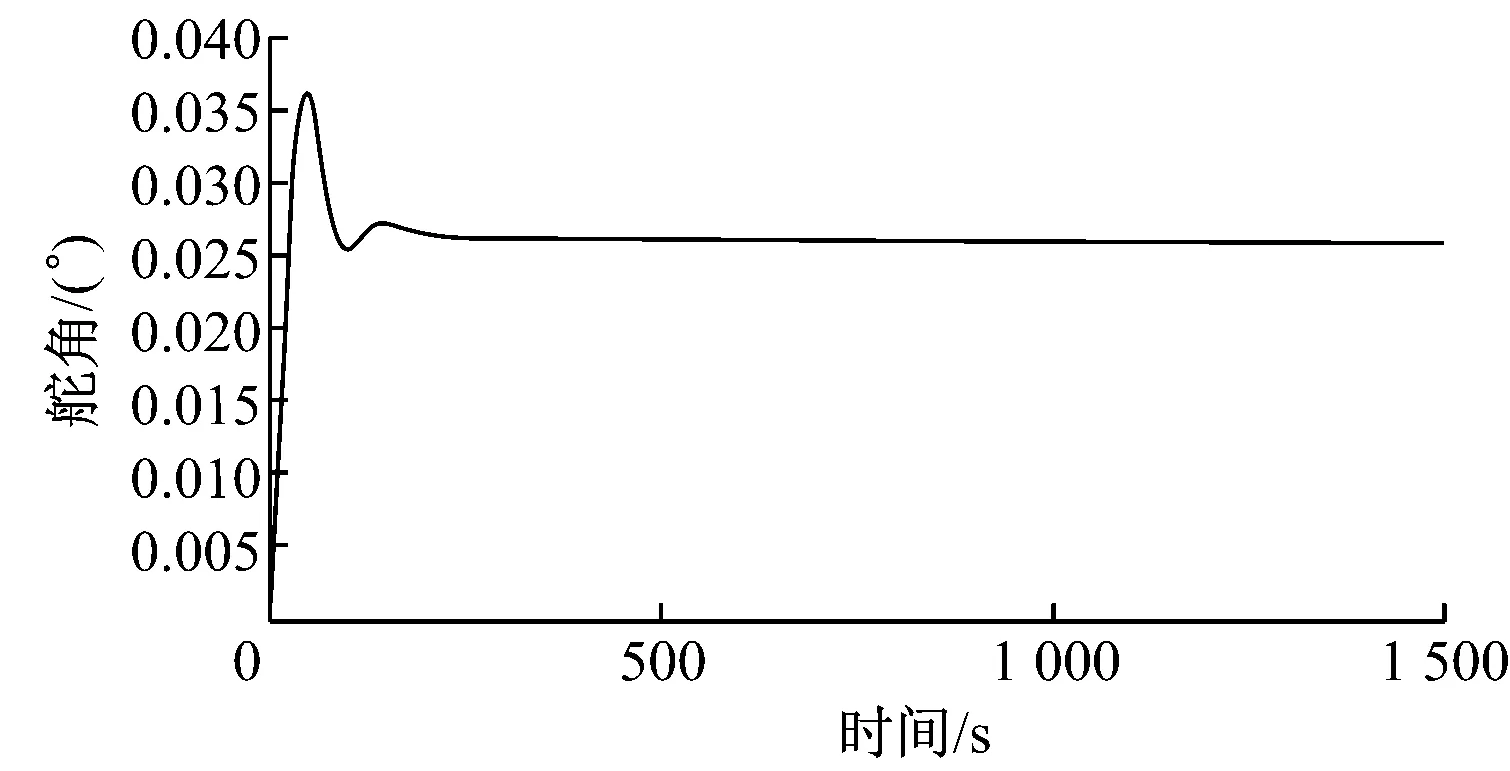
(b) 舵角历时曲线

(c) 航行速度历时曲线

(a) 航向历时曲线

(b) 舵角历时曲线

(c) 航行速度历时曲线
5 结 语
运用设计的航向控制系统对风帆助航船舶的航向控制和不同风况下的保向性进行仿真,主要结论如下:
1.利用设计的航向控制系统,当风帆助航船舶改变航向时,其航向角能在短时间内调整到指定角度,舵角和航向角偏差也会在短时间内由指定角度变为0°。该航向控制系统能够有效控制风帆助航船舶的航向变化,保证船舶具有良好的操纵性。
2.利用该航向控制系统,能够保证风帆助航船舶的航向稳定。根据仿真结果,在一定的风况下,风帆助航船舶经过微小的偏航后其航向角能迅速变回0°;其舵角能在短时间内作出改变,使风帆助航船舶在海风影响下保持原航向,航迹保持不变。
3.在航向控制系统的作用下,风帆助航船舶能在正常风况下获得可靠的风帆助推力,并能保证船舶航行过程中航向的稳定性,使船舶不会因海洋风的影响而严重偏航,对风帆助航技术在大型远洋船舶上的推广应用起到了积极的作用。
[1] 陈鲁愚, 陈顺怀, 严新平. 大型远洋风帆助航船舶节能效率分析[J]. 船海工程, 2010, 39(6): 121-124.
[2] LU Jun, WANG Liming. The Research of Propulsion System Matching Calculation of Hybrid Diesel and Wind Propulsion Ship[C]. Mechanic Automation and Control Engineering (MACE), 2010.
[3] 张松涛, 任光. 基于反馈线性化的船舶航向保持模糊自适应控制[J]. 交通运输工程学报, 2005, 5(4):72-76.
[4] 鞠世琼. 船舶航迹舵控制技术研究与设计[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[5] 高洁. 基于PID的船舶航向控制[J]. 南通航运职业技术学院学报, 2013, 12(2): 44-47.
[6] 马壮. 模糊控制及其在船舶自动舵中的应用研究 [D]. 南京: 东南大学, 2000.
[7] Luyu C, Shunhuai C, Yigong W. Analysis on Sail Selection and Energy Conservation of a Panamax Bulk Carrier[C]//Advances in Energy Engineering (ICAEE), 2010 International Conference on IEEE, 2010.
[8] 刘宏达, 李殿璞, 马忠丽. 一种新型船舶航向智能 PID 控制器优化设计[J]. 船舶工程, 2007, 29(4): 36-39.
[9] 吕巍巍. 超大型船舶的风中保向性仿真研究[D]. 大连:大连海事大学, 2010.
[10] 杨盐生. 船舶在风浪中航行时保向问题的探讨[J]. 中国航海, 1994(2): 36-44.
SimulationofHeadingControlSystemforLargeOcean-GoingSail-AssistedShips
XULi1a,1b,FANGJunting1a,1b,WANGGuogang2
(1a. Key Laboratory of High Performance Ship Technology of Ministry of Education; 1b. School of Energy and Power Engineering,Wuhan University of Technology, Wuhan 430063, China; 2. Zhengzhou Yutong Bus Co., Ltd., Zhengzhou 450061, China)
Sea wind influences the course of sail-assisted ship. A stable heading control algorithm for the large ocean-going sail-assisted ship is designed to simulate heading control and course-keeping ability in different wind regimes with MATLAB/Simulink. According to the output of the simulation model, the heading control system is able to maintain the course stability of the sail-assisted ship under the influence of sea wind, and adjust the course accurately and quickly.
waterway transportation; sail-assisted ship; heading control system; course-keeping ability; simulation
2014-07-20
国家高技术研究发展计划(“八六三”计划)项目(2012AA112702);中央高校基本科研业务费专项资金资助项目(2013-IV-045)
徐 立(1975—),男,副教授,硕士生导师,主要从事风能、太阳能、核能等清洁能源在大型远洋船舶上的应用研究。
E-mail: xuli92211@163.com
1000-4653(2014)04-0096-04
U664.82
A
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
走向世界(2021年45期)2021-12-23
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船电子工程(2020年4期)2020-06-19
民用飞机设计与研究(2019年4期)2019-05-21
小溪流(画刊)(2018年11期)2018-03-18
人大建设(2017年4期)2017-07-21
电子制作(2017年24期)2017-02-02
