基于GNSS通道差分的紧组合滤波方法研究*
2014-12-05 05:11常耀伟雷浩然王磊杰
航天控制 2014年5期
常耀伟 陈 帅 雷浩然 王磊杰
南京理工大学自动化学院,南京210094
捷联惯性导航系统(SINS)具有可提供姿态、速度和位置信息,短时间精度较高的特点,但其精度具有时间相关性,导航精度随时间的增加而降低;全球导航卫星系统(GNSS)具有与时间无关,定位输出稳定等特点,但是其定位条件苛刻,容易受到信号遮挡等外部因素的干扰;而卫星/惯性组合导航则结合二者特点,具有定位精度高,稳定性强等特点,因此被广泛应用。
基于伪距、伪距率的紧组合导航系统可以在卫星少于4 颗的情况下进行组合,有效抑制导航精度的发散,因此紧组合系统被广泛应用在诸如高动态、信号遮挡等情况[1]。若GNSS 出现时钟异常等情况,则伪距、伪距率误差出现异常,常规紧组合系统将异常的误差量引入到回路中,从而导致导航精度下降;同时,紧组合导航系统需要对GNSS 接收机各通道量测信息进行解算处理,占用时间较大,因此削弱伪距和伪距率误差对导航系统的影响和提高紧组合导航实时性是十分必要的。
本文基于某型导弹紧组合研制项目背景,对双通道差分降维滤波算法进行仿真研究。首先进行了组合导航滤波算法的设计,在此基础上,建立紧组合仿真系统,用于仿真降维滤波算法的性能。
1 组合导航算法设计
若GNSS 出现时钟异常或组合滤波相关时钟误差出现跳变等情况[2],则会引起伪距、伪距率误差异常,常规紧组合系统会将这2个异常的误差量引入到回路中,从而导致常规紧组合导航系统精度下降。同时考虑到要降低导航计算机的运算负荷,提高导航实时性。因此,基于SINS/GNSS 紧组合系统数学模型,设计了一种双通道降维滤波器,即15 阶卡尔曼滤波进行组合导航信息融合。
1.1 系统状态方程与量测方程
常规紧组合导航系统常采用17 阶滤波方程,具体形式如下:
状态方程:

量测方程:

状态方程中:

上式中,φE,φN,φU为东北天姿态失准角,δVE,δVN,δVU为东北天速度误差,δL,δλ,δh 为纬经高位置误差,εx,εy,εz为载体系下陀螺随机常值漂移,为载体系下加速度计零位漂移,与时钟误差等效的距离误差为δtu,与时钟频率误差等效的距离率误差为δtru。
F(t)为系统状态转移矩阵,G(t)为系统噪声驱动矩阵,W(t)为系统噪声矩阵,Z(t)为系统观测矢量,H(t)为系统观测矩阵,V(t)为系统观测噪声阵。
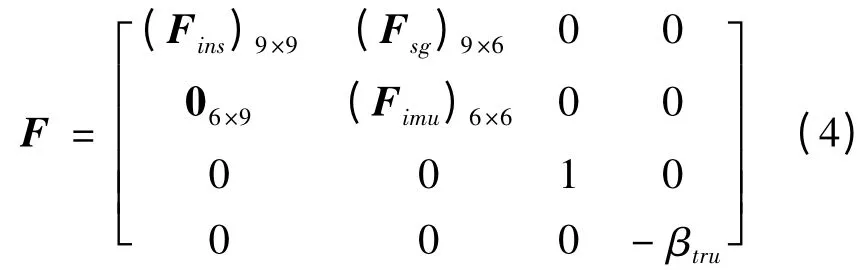
Fins为惯导系统误差矩阵,由惯导系统基本误差方程决定。Fsg为惯性器件误差转换矩阵。Fimu由惯性器件的噪声特性决定,具体形式参见文献[3]。

系统噪声矩阵为:

伪距(伪距率)观测方程中观测矢量的维数n和收到的卫星数目N 有关:

当GNSS 接收机接收到的有效卫星数目大于4颗时,通过选星算法获取最佳4 颗导航卫星[4],故量测矩阵为8 ×17 阶。当接收到的有效卫星数目小于4 颗时,GNSS 接收机各通道量测信息均将用于构造量测方程,故量测矩阵为2N ×17 阶。
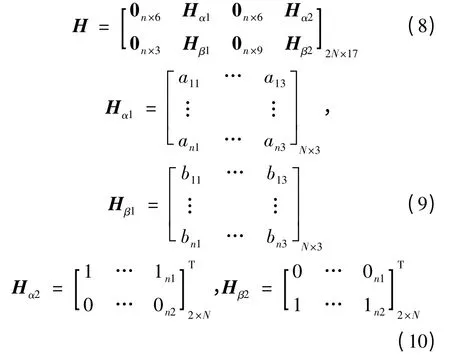
其中参数为:

上述参数中,m 取值1 到n。ei1,ei2,ei3分别为载体和第m 颗卫星之间的方向余弦[5]。
1.2 双通道降维滤波算法设计
双通道降维滤波器设计的思路是:系统状态方程不再扩充钟差和钟漂误差变量,由星间单差抵消;系统量测方程中选择一个通道作为基准通道,其它通道与此通道做差构成量测信息,从而降低状态方程和量测方程的维数。
系统状态方程的构成形式和15 阶松组合系统状态方程相同,具体形式参见文献[3]。
根据SINS/GNSS 紧组合观测方程的推导[5]可知,GNSS 接收机a 通道的伪距差和伪距率差量测量如下:

将a 通道和b 通道测量值进行差分,形式如下:
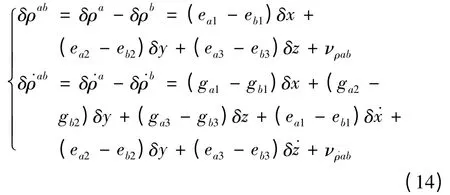
式中,a = 1,…,n,a ≠b。将第1个通道设置为基准通道,然后分别与其余的n -1个通道进行差分,可以得到:
1) 伪距差分量测方程

其中,


2) 伪距率差分量测方程

其中,


综上所述,可以得到系统观测方程如下所示:
2 仿真与分析
首先,基于上述算法设计搭建紧组合系统,然后针对GNSS 时钟异常等情况,进行了常规滤波和降维滤波仿真对比。
2.1 紧组合系统设计
2.1.1 系统总体结构
SINS/GNSS 紧组合导航仿真系统主要实现紧组合仿真和双通道降维滤波仿真等功能。整个系统主要包含以下模块:导航参数配置模块、轨迹发生模块、组合导航解算模块、数据监测与分析模块等。

图1 SINS/GNSS 紧组合仿真系统结构框图
2.1.2 模块具体功能
紧组合导航仿真系统各模块具体功能如下:
1)导航参数配置模块
主要是为整个导航系统配置相关的参数,包括:卡尔曼滤波器初始参数设置,卫星接收截止高度角的选择,选星算法的选择,惯导解算算法的选择,飞行轨迹配置,卫星导航系统的选择等。
2)轨迹发生模块
根据载体运动轨迹,结合误差发生模块加入误差特性,以模拟IMU 输出。同时,通过GNSS 星座仿真得到卫星数据,由故障发生器模拟产生外部干扰以尽可能模拟真实的飞行环境。
3)组合导航模块
该模块是整个紧组合仿真模块的核心,其接收IMU 和GNSS 量测数据进行导航解算并输出导航参数,主要计算包括:选星算法、捷联惯导解算、卡尔曼滤波[6-7]等。
4)数据监测与分析模块
该模块主要进行导航系统监控、性能分析与评估,其主要功能包括:飞行参数实时显示、误差输出与分析、3D 飞行视图展现及仿真结果存储等。图2为紧组合导航仿真系统软件界面。
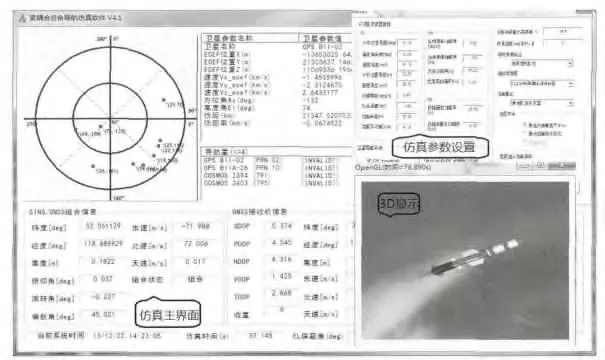
图2 仿真系统软件界面
2.2 仿真条件
在仿真中子系统输出频率及仿真初始条件如下:组合滤波频率为1Hz,IMU 输出频率200Hz,GNSS 输出频率为1Hz;载体初始静止,初始位置:北纬32.03°、东经118.46°、高程5m;初始姿态:俯仰角0°、横滚角0°、航向角45°;可见星的屏蔽角为10°。载体飞行轨迹设置参见表1,伪距和伪距率误差跳变时刻及跳变值参见表2。
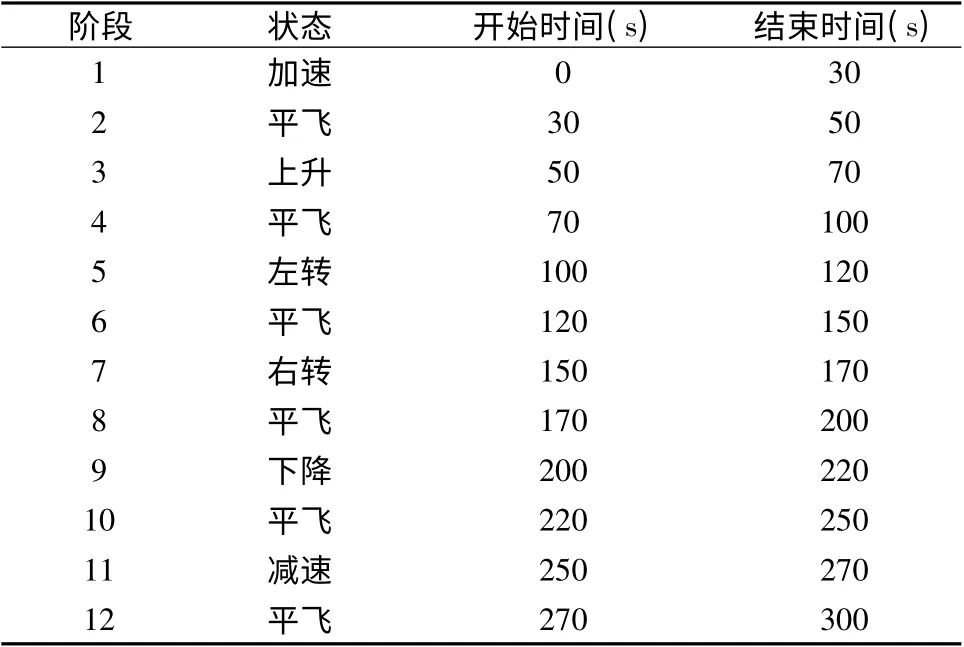
表1 载体飞行轨迹

表2 伪距、伪距率误差跳变时刻
2.3 双通道降维滤波性能仿真
在常规滤波器中初始估计方差P0,系统噪声方差Q,系统观测噪声方差R 分别设置如下:

在双通道降维滤波器中初始估计方差P0,系统噪声方差Q,系统观测噪声方差R 分别设置如下:

图3(a)~(c)为对比仿真曲线。
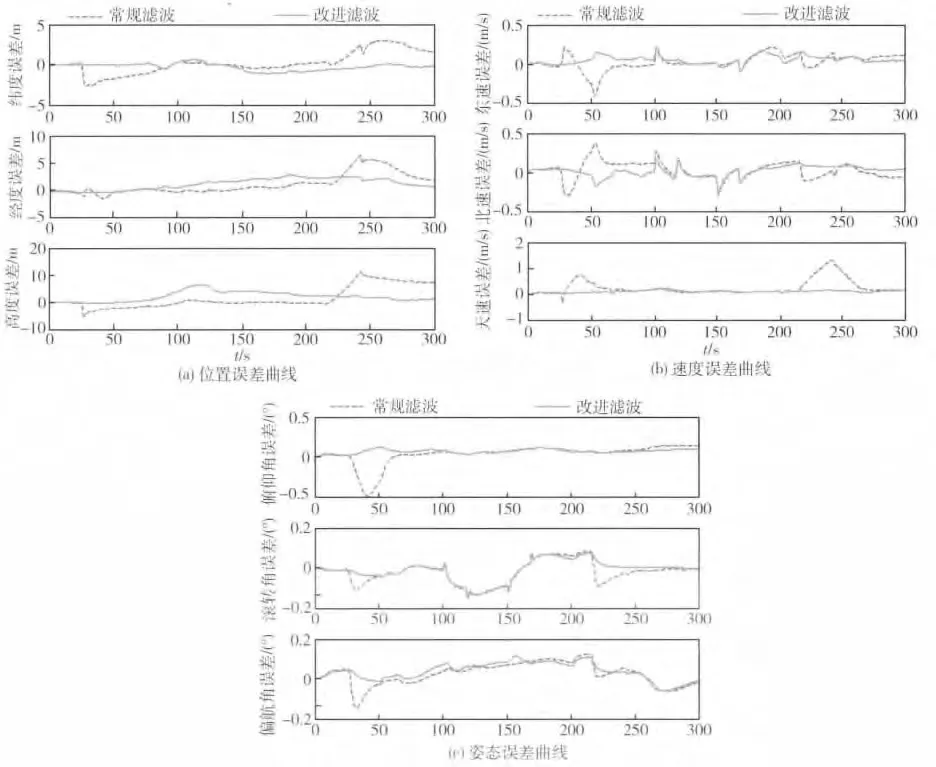
图3 常规全维滤波与改进降维滤波仿真结果曲线
2.4 结果分析
从图3 分析可知:
1)双通道降维滤波器:水平位置误差小于5m,高度误差小于10m。速度误差小于0.3m/s,姿态角小于0.2°。满足导航精度要求;
2)在GNSS 时钟存在异常的情况下,若采用常规滤波,则将异常的伪距、伪距率误差反馈到系统回路中,必将导致导航精度的下降;
3)双通道降维滤波器未将伪距、伪距率误差考虑在状态变量中,同时在量测方程中将双通道的伪距、伪距率差作为量测量,抵消了钟差、钟漂等的影响,因此在GNSS 时钟存在异常的情况时,降维滤波的导航精度优于常规滤波;
4)双通道降维滤波器降低了状态方程和观测方程的维数,降低了组合滤波器的运算复杂度,因此相较单通道常规滤波器具有更高的滤波实时性。
3 结论
介绍了SINS/GNSS 紧组合导航系统仿真系统。模拟GNSS 时钟异常的情况,以验证降维滤波器的性能优势。通过仿真对比表明了双通道降维滤波器的有效性。该仿真为SINS/GNSS 紧组合系统的进一步研究和工程化实现提供了重要依据。
[1]周坤芳,孔键,周湘蓉.紧耦合GPS/INS 组合导航能力的分析[J]. 中国惯性技术学报,2005,13(6):50-53.(ZHOU Kunfang,KONG Jian,ZHOU Xiangrong.Analysis on Modular Navigation Ability of Coupling GPS/INS[J].Journal of Chinese Inertial Technology,2005,13(6):50-53.)
[2]叶萍.MEMS IMU/GNSS 超紧组合导航技术研究[D].上海交通大学,2011:70-77.(YE Ping .Research on MEMS IMU/GNSS Ultra-tight Integration Navigation Technology [D]. Shanghai Jiao Tong University,2011:70-77.)
[3]袁信,俞济祥,陈哲.导航系统[M].北京:航空工业出版社,1993:178-181. (YUAN Xin ,YU Jixiang,CHEN Zhe.Navigation System[M]. Beijing :Aviation Industry Press,1993:178-181.)
[4]何晓峰.北斗/微惯导组合导航方法研究[D].国防科技大学,2009:57-59. (HE Xiaofeng. Algorithms for BD/MIMU Integrated Navigation Systems[D]. National University of Defense Technology,2009:57-59.)
[5]王惠南.GPS 导航原理与应用[M].北京:科学出版社,2008:244-248.(WANG Huinan. Principles and Applications of GPS Navigation [M]. Beijing :Science Press ,2008:244-248.)
[6]陈帅,管雪元,薛晓中,等.弹载SINS/GPS 组合导航信息同步与融合技术[J]. 火力与指挥控制,2009,34(10):69-72. (CHEN Shuai,GUAN Xueyuan,XUE Xiaozhong,et al. Data Synchronization and Fusion Method in SINS/ GPS Integrated Navigation System for Guidance Munitions[J].Fire Control & Command Control,2009,34(10):69-72.)
[7]马云峰.MSINS/GPS 组合导航系统及其数据融合技术研究[D].东南大学,2006:82-84.(MA Yunfeng .Research on MSINS/GPS Integrated Navigation System and Its Data Fusion Technology[D].Southeast University,2006:82-84.)
猜你喜欢
车主之友(2022年4期)2022-08-27
昆明医科大学学报(2021年4期)2021-07-23
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
海峡姐妹(2019年12期)2020-01-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
电子设计工程(2015年16期)2015-02-27
计算物理(2014年1期)2014-03-11
燕山大学学报(2014年1期)2014-03-11