港珠澳大桥岛隧工程GPS控制点稳定性研究
2014-12-12 01:47孙丕川黄声享李冠青
测绘通报 2014年2期
孙丕川,黄声享,李冠青
(武汉大学测绘学院,湖北 武汉430079)
一、引 言
港珠澳大桥主体工程岛隧工程起于粤港分界线,止于西人工岛结合部非通航孔桥西端,全长约7440 m。东人工岛东边缘距粤港分界线约366 m,西人工岛东边缘距伶仃西航道约2000 m,两岛长度均为625 m,两岛最近边缘间距约5584 m。目前在东、西人工岛北侧分别建设测量平台各一个。岛隧工程首级加密控制网测量工作对于建立岛隧工程统一的测量基准具有重要意义,为沉管安装的精确定位及贯通测量提供稳定可靠的保障。
稳定的基准是建筑物变形分析的重要参照,由于港珠澳大桥GPS控制点位于人工岛上,因水位变化及其他一些环境因素的影响,会使施工区发生一定的变形,必须加强监测和稳定性分析,来分析变形对GPS控制点的稳定性的影响。本文结合工程实际情况,利用三倍中误差法进行了相应的控制点稳定性研究。
二、GPS观测和数据处理
本文所涉及的港珠澳大桥岛隧工程GPS控制网由11个控制点组成,其中,东人工岛埋设测量控制点6个,西人工岛埋设测量控制点5个。目前,监测工作已经进行多期,根据历次复测各控制点的稳定性状况及现场施工测量需求,至今还在使用中的点位有:
1)东人工岛 DD03、DD05、DD06、DD09。
2)西人工岛 XD03、XD05、XD06、XD07、XD10。
其中,DD09、XD10两点是后期复测时新增加的控制点。根据现场条件及控制点稳定性要求,在钢圆筒及副格上焊接观测平台和观测墩,埋设强制对中装置,控制点顶标高约为8.0 m,图1为岛隧工程首级加密控制网图,由于基线长短差异较大,故东、西岛间的跨海基线未在图上标出。

图1 岛隧工程首级加密控制网示意图
GPS平面控制网采用静态观测模式,将岛隧工程首级加密控制网点同东、西岛测量平台参考站及全站仪观测墩点、HZMB-CORS站、香港小冷水CORS站等共计19个点进行联测。每期共观测3个时段,每个时段长度不少于23 h,网形如图2所示。GPS观测的基线解算采用GPS精密处理软件Gamit v10.4配合精密星历进行。单点单时段的GPS有效观测数据不少于20 h。采用科傻(CosaGPS)数据处理软件,按照公路二等的要求对解算完毕的基线进行重复基线检核、GPS环闭合差等检验。经检验全部符合技术要求。

图2 联测构网示意图
同时使用TBC软件对起算点进行稳定性分析计算,通过平差计算发现:HKSL、YELI、YNHN的稳定性良好;LRS1、LRS2由于是海中平台上的点,稳定性相对于CORS站较差,但差值不大,可以作为起算点使用。
三、稳定性分析方法
采用3倍中误差法进行分析。对数据进行二维约束平差后,得到控制点的平面坐标及各点的点位中误差,根据两期观测同一控制点的点位中误差,可以计算出点位坐标变化允许值,计算方法为式中,mP1、mP2分别是原测网与复测网同一控制点的点位中误差,取其平方和开方的3倍作为点位坐标变化允许值,即MP=3mP。

然后计算两期网中同一控制点的点位较差

式中,xP1、yP1、xP2、yP2分别为原测网和复测网相应点的坐标。因此,对于网中任意一点,如果ΔP不超过MP,则认为点位是稳定的。
四、结果分析
图3是两期的点位位移矢量图。由图3可见,XD03、XD07、XD06、DD05 点的位移相对较大。
根据最新两期复测数据及平差结果对7个控制点进行稳定性分析,结果见表1。
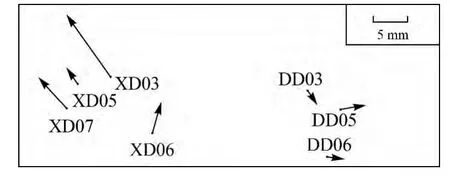
图3 控制点两期坐标对比位移矢量图

表1 两期观测控制点的三倍中误差法检测 cm
由表1可见,点位XD03、XD06、XD07、DD05 的位移变化超限,即该点位不稳定。从结果来看,XD06、DD05超出限差较小,而XD03变化明显。另外,XD06点的位移趋势不同于其他点,建议有必要在后续的监测中,应加强对XD06及XD03号点的监测。
五、结束语
针对港珠澳大桥主体工程岛隧工程建设期,控制点位环境的特殊性和点位稳定性监测要求,利用Gamit软件对GPS控制网观测数据处理及两期观测数据的二维约束平差,由两期平差结果对控制点的点位稳定性及其位移趋势进行分析,结果表明,点位XD03、XD06、XD07、DD05 不稳定,XD03 点位变化较大,XD06点位的位移趋势明显区别整体位移趋势,该分析结果对后续复测工作和施工具有重要的指导意义。
[1]罗力,黄声享,杨保岑.三峡库区滑坡监测GPS控制点的稳定性分析[J].测绘通报,2012(S1):135-138.
[2]黄声享.监测网的稳定性分析[J].测绘信息与工程,2001(3):16-19.
[3]黄声享,尹晖,蒋征.变形监测数据处理[M].2版.武汉:武汉大学出版社,2010.
[4]陈永奇,吴子安,吴中用.变形监测分析与预报[M].北京:测绘出版社,2001.
猜你喜欢
百科探秘·海底世界(2022年5期)2022-05-28
河北地质(2020年3期)2020-12-14
航天制造技术(2020年4期)2020-09-11
工程与建设(2019年3期)2019-10-10
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
北京航空航天大学学报(2017年4期)2017-11-23
中国交通信息化(2017年12期)2017-06-06
中国工程咨询(2017年12期)2017-01-31
测绘科学与工程(2016年4期)2016-04-17